You might also like
- Hybrid Electric Vehicles: Principles and Applications with Practical PerspectivesFrom EverandHybrid Electric Vehicles: Principles and Applications with Practical PerspectivesNo ratings yet
- Presentation v0Document24 pagesPresentation v0Amit Singh DehuryNo ratings yet
- Unit 1 3Document84 pagesUnit 1 3sanjaysr2226No ratings yet
- Electronic VehicleDocument26 pagesElectronic VehicleBereket BeleteNo ratings yet
- Transmission System of Hev'sDocument29 pagesTransmission System of Hev'sVaibhav KirtiwarNo ratings yet
- Unesco - Eolss Sample Chapters: Electric VehiclesDocument9 pagesUnesco - Eolss Sample Chapters: Electric Vehiclesfaizu chauhanNo ratings yet
- Electric Vehicles: Prepared and Presented by Mr.P.R.Bhatt (H.O.D.Electrical, TDEC Surat)Document37 pagesElectric Vehicles: Prepared and Presented by Mr.P.R.Bhatt (H.O.D.Electrical, TDEC Surat)bhattparthivNo ratings yet
- Electric Vehicles - Latest EditionsDocument5 pagesElectric Vehicles - Latest EditionsSaeedAhmedKhan100% (1)
- Essential of Electric VehicleDocument36 pagesEssential of Electric VehicleSreejith S NairNo ratings yet
- Battery Requirements For Plug-In Hybrid Electric Vehicles - Analysis and RationaleDocument26 pagesBattery Requirements For Plug-In Hybrid Electric Vehicles - Analysis and RationaleJeannot MpianaNo ratings yet
- The Impact of EV in Utility Power GridDocument47 pagesThe Impact of EV in Utility Power GridMahmudul Hasan100% (1)
- VT L7 ElectricalSystemsDocument25 pagesVT L7 ElectricalSystemsahmed elsharkawyNo ratings yet
- EV3 Class 2 Archetecture of EVDocument54 pagesEV3 Class 2 Archetecture of EV2B Dai Ko DUPLICATENo ratings yet
- Ev Unit 1Document39 pagesEv Unit 1Nihad AhmedNo ratings yet
- Module 2.1Document33 pagesModule 2.1RanjanaNo ratings yet
- ProjectDocument15 pagesProjectarul371901No ratings yet
- (Iii) H E V: W I I ?: Ybrid Lectric Ehicle HAT S TDocument23 pages(Iii) H E V: W I I ?: Ybrid Lectric Ehicle HAT S TbabyweiNo ratings yet
- Ac 2007-429: An Innovative Hybrid-Electric Drivetrain Concept and Student ProjectDocument13 pagesAc 2007-429: An Innovative Hybrid-Electric Drivetrain Concept and Student ProjectAbdul HakeemNo ratings yet
- IEEE DL Lecture Eastern North Carolina April 19 2012Document64 pagesIEEE DL Lecture Eastern North Carolina April 19 2012Ed-dahmani ChafikNo ratings yet
- ESC L2 Energy Storage Tech OUTDocument48 pagesESC L2 Energy Storage Tech OUTPol CireraNo ratings yet
- What's The Deal With Hybrid and Electric Cars?: Day 1: Introduction To Electric VehiclesDocument45 pagesWhat's The Deal With Hybrid and Electric Cars?: Day 1: Introduction To Electric VehiclesAnonymous AlhzFE9EVNNo ratings yet
- EHV Module IDocument92 pagesEHV Module IArun ShobyNo ratings yet
- Lecture 2Document31 pagesLecture 2khanrafsan312No ratings yet
- Upercapacitors For Transportation ApplicationsDocument26 pagesUpercapacitors For Transportation ApplicationsSammyNo ratings yet
- Electric Vehicles Battery Management System: Electrical and Electronics Engineering DepartmentDocument13 pagesElectric Vehicles Battery Management System: Electrical and Electronics Engineering DepartmentSam Moses MandapalliNo ratings yet
- Electric Car 1Document25 pagesElectric Car 1Bala LakshmanNo ratings yet
- Hybrid Electric Vehicle: A Dolcera Report December 2005Document24 pagesHybrid Electric Vehicle: A Dolcera Report December 2005Vishnu BrcNo ratings yet
- Diesel Electric Systems For Offshore Vessels: Introduction and SummaryDocument9 pagesDiesel Electric Systems For Offshore Vessels: Introduction and Summaryjoaofelipe.msNo ratings yet
- Novel Technique For Hybrid Electric VehicleDocument25 pagesNovel Technique For Hybrid Electric VehicleManish SadhuNo ratings yet
- Integrating Discoveries From Other Scientific Fields Into Energy Science and Technology 3Document41 pagesIntegrating Discoveries From Other Scientific Fields Into Energy Science and Technology 3DaisyNo ratings yet
- Hybrid Electric Vehicle: A Dolcera Report December 2005Document24 pagesHybrid Electric Vehicle: A Dolcera Report December 2005Sanjay MehrishiNo ratings yet
- MPC For Battery Fuel Cell Hybrid VehicleDocument30 pagesMPC For Battery Fuel Cell Hybrid VehicleSab-Win DamadNo ratings yet
- IAIIC2016 HVEV 07 Final Submit AllResearchGate01Document17 pagesIAIIC2016 HVEV 07 Final Submit AllResearchGate01Piyush KulkarniNo ratings yet
- Hybrid ArchitectureDocument15 pagesHybrid ArchitectureTharinduNo ratings yet
- Read MeDocument4 pagesRead MeaufNo ratings yet
- Electric Vehicle TypesDocument20 pagesElectric Vehicle TypesjjjjNo ratings yet
- Phev Control Strategy: Project ID # VSSP - 18 - RousseauDocument19 pagesPhev Control Strategy: Project ID # VSSP - 18 - Rousseausergii_lemeshkoNo ratings yet
- Uth13. Upeee Drtria E-TrikeDocument29 pagesUth13. Upeee Drtria E-TrikeJerome UapsaNo ratings yet
- Electric - Propulsion Imtech DieselElSys Rev05Document10 pagesElectric - Propulsion Imtech DieselElSys Rev05moiseian100% (1)
- A Multifunctional Solar PV and Grid Based On-Board Converter For Electric VehiclesDocument31 pagesA Multifunctional Solar PV and Grid Based On-Board Converter For Electric VehiclesprashanthiNo ratings yet
- HEV EV ArchitectureDocument48 pagesHEV EV ArchitectureConstantin Teodor ArdeiuNo ratings yet
- Design of B-S SystemDocument6 pagesDesign of B-S SystemRadoy CristyNo ratings yet
- A Survey and Comparison of Characteristics of Motor Drives Used in Electric VehiclesDocument4 pagesA Survey and Comparison of Characteristics of Motor Drives Used in Electric VehiclesGabriel de SáNo ratings yet
- Future Efficiency of The Internal Combustion Engine: Nick Collings Cambridge University Engineering DepartmentDocument51 pagesFuture Efficiency of The Internal Combustion Engine: Nick Collings Cambridge University Engineering DepartmentSiddhanth GambhirNo ratings yet
- Odtü LodosDocument68 pagesOdtü LodosMehmet Fatih SunçaNo ratings yet
- The Hy-Wire Car Report FinalDocument23 pagesThe Hy-Wire Car Report FinalDara SatwikNo ratings yet
- Article Tom Static DrivesDocument8 pagesArticle Tom Static DrivesMohamedElsawiNo ratings yet
- Pedl Exp 4Document8 pagesPedl Exp 4Tejas MayekarNo ratings yet
- All Team Meet-2Document23 pagesAll Team Meet-2Nikhil KumarNo ratings yet
- SEMINAR REPORT On Hybrid Electric VehiclesDocument21 pagesSEMINAR REPORT On Hybrid Electric VehiclesEpsilon PandaNo ratings yet
- B1Grp4 (BLDC) Tut4Document14 pagesB1Grp4 (BLDC) Tut4Jobis JohnsonNo ratings yet
- Effect of Transmission Design On Electric Vehicle (EV) PerformanceDocument6 pagesEffect of Transmission Design On Electric Vehicle (EV) PerformanceSwati NikamNo ratings yet
- Motores de Imánes Permanentes y de InductanciaDocument5 pagesMotores de Imánes Permanentes y de InductanciaFreddy Julián Chipugsi CaleroNo ratings yet
- Hybrid Electric Vehicle: BY: Rishav Raj Avinash Ravi Shankar Sidharth Rao Siddhant Kr. KandoiDocument30 pagesHybrid Electric Vehicle: BY: Rishav Raj Avinash Ravi Shankar Sidharth Rao Siddhant Kr. Kandoispy shotNo ratings yet
- Electric CarsDocument18 pagesElectric Carsabdokhamis000No ratings yet
- Electric Vehicles and Power Electronics: Outline of PresentationDocument41 pagesElectric Vehicles and Power Electronics: Outline of PresentationSergio GarciaNo ratings yet
- Model Based Development of Future Small Electric Vehicle by ModelicaDocument8 pagesModel Based Development of Future Small Electric Vehicle by ModelicashubhamformeNo ratings yet
- EV DesignDocument13 pagesEV Designhussien eidNo ratings yet
- 3 Ehv 01 - 3Document23 pages3 Ehv 01 - 3Thamizh selvanNo ratings yet
- Hybrid Electric Vehicles: By: Davin Matsuda EE453 Electric Drives Winter 01Document31 pagesHybrid Electric Vehicles: By: Davin Matsuda EE453 Electric Drives Winter 01sayedmhNo ratings yet
- Powertrain Design Group Meeting #1: Final Report of "Automotive Powertrain System"Document24 pagesPowertrain Design Group Meeting #1: Final Report of "Automotive Powertrain System"THRIDEV SNo ratings yet
- (Most Important Contacts List) : Name: Phone: Address: Email: NotesDocument1 page(Most Important Contacts List) : Name: Phone: Address: Email: NotesTHRIDEV SNo ratings yet
- Hybrid Electric Vehicles: By: Davin Matsuda EE453 Electric Drives Winter 01Document31 pagesHybrid Electric Vehicles: By: Davin Matsuda EE453 Electric Drives Winter 01sayedmhNo ratings yet
- (Most Important Contacts List) : Name: Phone: Address: Email: NotesDocument1 page(Most Important Contacts List) : Name: Phone: Address: Email: NotesTHRIDEV SNo ratings yet
- (Most Important Contacts List) : Name: Phone: Address: Email: NotesDocument1 page(Most Important Contacts List) : Name: Phone: Address: Email: NotesTHRIDEV SNo ratings yet
- Electric Motor VehiclesDocument19 pagesElectric Motor VehiclesAmisha SharonNo ratings yet
- Hybrid Electric VehiclesDocument19 pagesHybrid Electric VehiclesShaurya DagarNo ratings yet
- Montacargas FeelerDocument2 pagesMontacargas Feelerrickunert91No ratings yet
- 21 BodyElectrical PDFDocument26 pages21 BodyElectrical PDFAnonymous 8GJQCGaeNo ratings yet
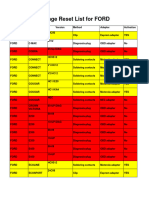
- FORD Mileage Reset ListDocument13 pagesFORD Mileage Reset ListRogelio ValdezNo ratings yet
- Technical Presentation Topic - Study of EvDocument24 pagesTechnical Presentation Topic - Study of EvsaikiranvullenduladjNo ratings yet
- Kardan Mili Mafsal İstavrozlari (Universal Joint Kits) : KOD DIA. Mm. Referans No Oem No Koli FiyatDocument115 pagesKardan Mili Mafsal İstavrozlari (Universal Joint Kits) : KOD DIA. Mm. Referans No Oem No Koli FiyatЕвгенийNo ratings yet
- Future of Mobility - Preview Report-1Document25 pagesFuture of Mobility - Preview Report-1Andrés De FerariNo ratings yet
- Hybrid Electric Vehicles: Johan Driesen K.U.Leuven - ESAT/ELECTADocument67 pagesHybrid Electric Vehicles: Johan Driesen K.U.Leuven - ESAT/ELECTATanawat ThanthongNo ratings yet
- World - EVs Battery DataDocument4 pagesWorld - EVs Battery Datagrangsang isuzu100% (1)
- Electric Car 1Document25 pagesElectric Car 1Bala LakshmanNo ratings yet
- SM2204Document15 pagesSM2204Tarun GeetarNo ratings yet
- Cjenovnik Za Velike Kupce 2020Document5 pagesCjenovnik Za Velike Kupce 2020Ermina MekicNo ratings yet
- Mah Le ChartDocument6 pagesMah Le ChartFranklin CaizaNo ratings yet
- Снимок экрана 2023-03-01 в 09.16.43Document48 pagesСнимок экрана 2023-03-01 в 09.16.43Maksim ZolotarjovNo ratings yet
- Codigo Industrial RenaultDocument2 pagesCodigo Industrial RenaultMario Enrique SardiNo ratings yet
- ST1911 G20 PHEV Complete VehicleDocument191 pagesST1911 G20 PHEV Complete VehicleAlessandroMoreniNo ratings yet
- Unit 7Document2 pagesUnit 7gffjffjbdhjfNo ratings yet
- Regenerative Braking System Full ProjectDocument24 pagesRegenerative Braking System Full ProjectĨ Åm MoħănNo ratings yet
- Jeep ReportDocument37 pagesJeep ReportKaranbir SinghNo ratings yet
- Volvo Penta Engine HosesDocument2 pagesVolvo Penta Engine HosesMarine Parts ChinaNo ratings yet
- AutoosDocument244 pagesAutoosFogwill100% (2)
- bj0005 Benz GTR Amg User Manual enDocument32 pagesbj0005 Benz GTR Amg User Manual enEnriqueCobosNo ratings yet
- Service Manual - Volkswagen Passat B7 - enDocument42 pagesService Manual - Volkswagen Passat B7 - enOvidiu Grindean60% (5)
- Lista Great Wall PDFDocument115 pagesLista Great Wall PDFModesto Francisco Martínez Pérez100% (1)
- Tesla Semi RecallDocument3 pagesTesla Semi RecallSimon AlvarezNo ratings yet
- MECH80003 Section1 IntroductionDocument9 pagesMECH80003 Section1 Introductionsunny bhatiaNo ratings yet
- Audi A6 C5 2000 Schematy ElektryczneDocument70 pagesAudi A6 C5 2000 Schematy ElektryczneMateusz Repeczko100% (2)
- Ilovepdf MergedDocument90 pagesIlovepdf MergedMario Cembellin Ferreiro75% (4)
- To 2015 Toyota AvalonDocument2 pagesTo 2015 Toyota AvalonOluwaseyi AdewaleNo ratings yet