You might also like
- Ford Motorcraft Diesel EnginesDocument13 pagesFord Motorcraft Diesel EngineshuskerchampsNo ratings yet
- SR200 Electrical PDFDocument5 pagesSR200 Electrical PDFAnonymous Hd32bhq100% (4)
- Present Chiller 2 Log Sheet.....Document1 pagePresent Chiller 2 Log Sheet.....Madan Tiwari100% (2)
- AC Drives MSc2016Document21 pagesAC Drives MSc2016Mohamed Elsaid El ShallNo ratings yet
- Dynamometer: Theory and Application to Engine TestingFrom EverandDynamometer: Theory and Application to Engine TestingNo ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- 6 Motor Basics HandoutDocument18 pages6 Motor Basics HandoutTan Yit KeongNo ratings yet
- HB20-II / HB30-II / HB40-II: Operation and Maintenance ManualDocument91 pagesHB20-II / HB30-II / HB40-II: Operation and Maintenance ManualLuisa Fernanda Salazar Pulgarin100% (2)
- Electric Motors Reference GuideDocument166 pagesElectric Motors Reference GuideHemendra Jani100% (1)
- Bharat Bijlee MotorsDocument20 pagesBharat Bijlee MotorsashiyNo ratings yet
- Komatsu PC290 290LC 8 S PDFDocument1,050 pagesKomatsu PC290 290LC 8 S PDFJhon Alexander Nizama Balladares100% (6)
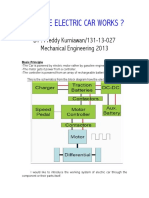
- How The Electric Car WorksDocument6 pagesHow The Electric Car WorksFreddy KurniawanNo ratings yet
- Electric Motors: Syllabus Electric Motors: Types, Losses in Induction Motors, Motor Efficiency, Factors AffectingDocument12 pagesElectric Motors: Syllabus Electric Motors: Types, Losses in Induction Motors, Motor Efficiency, Factors AffectingAjay kunwar singhNo ratings yet
- Electic MotorsDocument22 pagesElectic MotorsAshutosh ShuklaNo ratings yet
- Motors Motor SelectionDocument166 pagesMotors Motor SelectionAragaw MuluNo ratings yet
- Motorized Screw Jack Project 2Document92 pagesMotorized Screw Jack Project 2AbhinavTiwariNo ratings yet
- Presentation On Motors & VFD: Submitted To:-Submitted ByDocument32 pagesPresentation On Motors & VFD: Submitted To:-Submitted Byparth dosiNo ratings yet
- Types of MotorsDocument12 pagesTypes of MotorsMatin Inamdar100% (1)
- Introduction To Industrial DrivesDocument70 pagesIntroduction To Industrial Drivesvnyshreyas100% (4)
- Electrical Motor 2Document74 pagesElectrical Motor 2abdulkadhir100% (1)
- Yanmar Outboard Motor D27 - D36 Operation Manual (En)Document47 pagesYanmar Outboard Motor D27 - D36 Operation Manual (En)Jan Svein HammerNo ratings yet
- DC Motors InformationDocument9 pagesDC Motors InformationCarlosNo ratings yet
- EE Tech in Electrical SystemsDocument38 pagesEE Tech in Electrical SystemsPriyesh MohtureNo ratings yet
- Soil Sampling in Geotechnical EngineeringDocument17 pagesSoil Sampling in Geotechnical EngineeringSana Ansari81% (21)
- Techno-Economic Analysis of Solar Photovoltaic PowDocument8 pagesTechno-Economic Analysis of Solar Photovoltaic PowrabiNo ratings yet
- Drive Selection of Rolling MillsDocument4 pagesDrive Selection of Rolling MillsCihan OzturkNo ratings yet
- RX RVRDocument7 pagesRX RVRpcatruongNo ratings yet
- Datasheet TS6Document9 pagesDatasheet TS6HUMBERTO OLIVEIRANo ratings yet
- See 1306Document153 pagesSee 1306Mogaka LucasNo ratings yet
- Drit Improving EnergyDocument3 pagesDrit Improving EnergyOnwunta E K OnwuntaNo ratings yet
- Unit I Ee6351Document23 pagesUnit I Ee6351karthiNo ratings yet
- Power Electronics and EDDocument45 pagesPower Electronics and EDtefe yabatuNo ratings yet
- EEE259 ELECTRICAL - DRIVES - AND - CONTROLS QB and AnswerDocument20 pagesEEE259 ELECTRICAL - DRIVES - AND - CONTROLS QB and AnswerMuniyasamyNo ratings yet
- Electric MotorDocument40 pagesElectric MotorhmiwukcyNo ratings yet
- ميكاترونكسDocument6 pagesميكاترونكسAhmed M. MuradNo ratings yet
- Electtrical Motors: Figures 4.1Document11 pagesElecttrical Motors: Figures 4.1Cholan PillaiNo ratings yet
- Cha 1Document14 pagesCha 1yaredNo ratings yet
- Lab Rep 2qweqretetDocument7 pagesLab Rep 2qweqretetKent Orriele FadriquelNo ratings yet
- Mech Electrical PowerDocument6 pagesMech Electrical PowerJezrael Kim SaquingNo ratings yet
- Fadriquel 2208 Laboratory Report 2Document7 pagesFadriquel 2208 Laboratory Report 2Kent Orriele FadriquelNo ratings yet
- Eee-Vii-Industrial Drives and Applications (10ee74) - NotesDocument90 pagesEee-Vii-Industrial Drives and Applications (10ee74) - NotesMohammed AlhakeemiNo ratings yet
- Lab Rep 2Document5 pagesLab Rep 2Kent Orriele FadriquelNo ratings yet
- Integrated Starter-Alternator SystemDocument7 pagesIntegrated Starter-Alternator Systempixelo09No ratings yet
- Electric Drives Unit-1 Lecture Session-1Document21 pagesElectric Drives Unit-1 Lecture Session-1Melam SurendraNo ratings yet
- Introduction To Electric Drives: by Dr. P.K Biswas Asst. Professor Department of Electrical Engineering NIT MizoramDocument21 pagesIntroduction To Electric Drives: by Dr. P.K Biswas Asst. Professor Department of Electrical Engineering NIT MizoramtoshaliNo ratings yet
- Chapter 1 - Electric DriveDocument76 pagesChapter 1 - Electric DriveNajihah YusofNo ratings yet
- Project On Avtron DriveDocument39 pagesProject On Avtron Drivenarendramaharana39No ratings yet
- Electrical Drives and Control EE1213Document18 pagesElectrical Drives and Control EE1213ViswanathanBalajiNo ratings yet
- Electrical Science-2: Term Paper of Ele102Document7 pagesElectrical Science-2: Term Paper of Ele102shailesh singhNo ratings yet
- Industrial Drives & Applications: Module - 1Document19 pagesIndustrial Drives & Applications: Module - 1NiharikaNo ratings yet
- Kaizen - Motor Selection GuideDocument10 pagesKaizen - Motor Selection GuideKarrar HussainNo ratings yet
- PDFDocument32 pagesPDFdinesh kNo ratings yet
- DRIVES NotesDocument44 pagesDRIVES NotesChase GarciaNo ratings yet
- Unit - 1Document12 pagesUnit - 1222 PiyushNo ratings yet
- Latest Electrical Motors Questions and AnswersDocument7 pagesLatest Electrical Motors Questions and AnswersInstrumentation ToolsNo ratings yet
- M1 BasicsDocument15 pagesM1 BasicsSenpai GamingNo ratings yet
- Induction Versus Synchronous: How To Select The Right Type of MotorDocument2 pagesInduction Versus Synchronous: How To Select The Right Type of MotorPedro BortotNo ratings yet
- Types of DriveDocument13 pagesTypes of DrivecoolrajeeeNo ratings yet
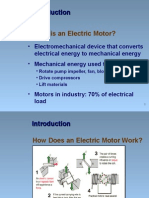
- What Is An Electric Motor?: - Electromechanical Device That Converts - Mechanical Energy Used To E.GDocument37 pagesWhat Is An Electric Motor?: - Electromechanical Device That Converts - Mechanical Energy Used To E.GRaja RamNo ratings yet
- DC Motor Efficiency Calculation Formula Amp EquationDocument8 pagesDC Motor Efficiency Calculation Formula Amp EquationPeter Tendai MakaraNo ratings yet
- M Group: Electrical Drives and Control - EE 1213Document18 pagesM Group: Electrical Drives and Control - EE 1213scribdm100% (3)
- Aman Powertrainev ElectricalDocument12 pagesAman Powertrainev Electricalsebecay203No ratings yet
- Ee-120 Ac MachineDocument6 pagesEe-120 Ac Machinesmk30150No ratings yet
- IE3-IE4 Motors - Selecting The Right Control and Protection Components - EE PublishersDocument8 pagesIE3-IE4 Motors - Selecting The Right Control and Protection Components - EE PublishersTruong HungNo ratings yet
- 1 - Part - One - LecturesDocument74 pages1 - Part - One - Lecturesrida.hamza.muhammadNo ratings yet
- Final PDF EditedDocument6 pagesFinal PDF EditedFirdous NaazNo ratings yet
- Company Registration in NepalDocument10 pagesCompany Registration in Nepalrabi100% (1)
- Company Registration in NepalDocument11 pagesCompany Registration in NepalrabiNo ratings yet
- Intersting - Energy - Issue - Nuclear FusionDocument5 pagesIntersting - Energy - Issue - Nuclear FusionrabiNo ratings yet
- Short Circuit Ratio of A Synchronous MachineDocument4 pagesShort Circuit Ratio of A Synchronous MachinerabiNo ratings yet
- Carbon Finance MechanismDocument13 pagesCarbon Finance MechanismrabiNo ratings yet
- Api5l vs. Astm A537 Cl2Document4 pagesApi5l vs. Astm A537 Cl2rabiNo ratings yet
- LG WD 10200ND - enDocument34 pagesLG WD 10200ND - endjvincNo ratings yet
- Rotational Motion & Moment of Inertia-III-JEE 20-Final-4-05-20 PDFDocument13 pagesRotational Motion & Moment of Inertia-III-JEE 20-Final-4-05-20 PDFVed NarsekarNo ratings yet
- Volvo Penta Inboard Diesel: Technical DataDocument2 pagesVolvo Penta Inboard Diesel: Technical DataRune SkigelstrandNo ratings yet
- Göttgens Forged Steel Valves GADocument88 pagesGöttgens Forged Steel Valves GAludaNo ratings yet
- White Paper Flowmeter AccuracyDocument2 pagesWhite Paper Flowmeter Accuracyธนาชัย เต็งจิรธนาภาNo ratings yet
- En 20898-1 (Iso 898-1) (Ex Uni 3740-3) Caratteristiche Meccaniche Degli Elementi Di Collegamento Viti e Viti PrigioniereDocument7 pagesEn 20898-1 (Iso 898-1) (Ex Uni 3740-3) Caratteristiche Meccaniche Degli Elementi Di Collegamento Viti e Viti Prigionierearmando2380% (1)
- Compressors For Industry: Tailored To Your RequirementsDocument40 pagesCompressors For Industry: Tailored To Your Requirementsst_calvoNo ratings yet
- RCSC Table 2.1 Nut and Washer TypesDocument1 pageRCSC Table 2.1 Nut and Washer TypesAdam JonesNo ratings yet
- ROTORCRAFT AEROMECHANICS 0. FrontmatterDocument6 pagesROTORCRAFT AEROMECHANICS 0. FrontmatterQuang Tuan BuiNo ratings yet
- FP VRC CatalogDocument6 pagesFP VRC CatalogfrazNo ratings yet
- Jawaban Fisika Irodov Bab 1.3Document3 pagesJawaban Fisika Irodov Bab 1.3Anak SerawaiNo ratings yet
- Roller CradleDocument4 pagesRoller CradleeliiiiiiNo ratings yet
- Cylinder Connections Din 477Document1 pageCylinder Connections Din 477ВикторNo ratings yet
- Downloads ch182 PDFDocument4 pagesDownloads ch182 PDFPablo Sanzana JaraNo ratings yet
- Tutorials 1-12: Tutorial Sheet 1Document11 pagesTutorials 1-12: Tutorial Sheet 1NarasimharaoNo ratings yet
- SPE 82415 Improved Rheology ModelDocument11 pagesSPE 82415 Improved Rheology ModelLeo Rojas DomNo ratings yet
- TC 53 Card Layout DesignDocument1 pageTC 53 Card Layout DesignJ.SathishNo ratings yet
- Science, Technology, Engineering and Mathematics Grade 12 General Physics 2Document5 pagesScience, Technology, Engineering and Mathematics Grade 12 General Physics 2riza amoresNo ratings yet
- Drive Shaft Literature SurveyDocument12 pagesDrive Shaft Literature SurveyNitin SkNo ratings yet
- Beaconhouse School System: Diagnostic Test (Grade)Document2 pagesBeaconhouse School System: Diagnostic Test (Grade)Asad ZamanNo ratings yet