You might also like
- Module 5 NoteDocument48 pagesModule 5 NoteRohitNo ratings yet
- Lect 06Document128 pagesLect 06Siva Dharshan ValuvanNo ratings yet
- Image Segmentation Digital Image ProcessingDocument48 pagesImage Segmentation Digital Image Processingrao001No ratings yet
- Segment 5Document100 pagesSegment 5priyaNo ratings yet
- Implementation of an Automatic Fingerprint Identification SystemDocument81 pagesImplementation of an Automatic Fingerprint Identification SystemrajNo ratings yet
- Concepts in Edge DetectionDocument32 pagesConcepts in Edge DetectionPiyush TrivediNo ratings yet
- Detecting Discontinuities in ImagesDocument99 pagesDetecting Discontinuities in ImagesDarsh ThakkarNo ratings yet
- Cp467 12 Lecture17 SegmentationDocument66 pagesCp467 12 Lecture17 Segmentationsatyastriver1518No ratings yet
- WINSEM2020-21 CSE4019 ETH VL2020210504006 Reference Material II 23-Mar-2021 Image SegmentationDocument25 pagesWINSEM2020-21 CSE4019 ETH VL2020210504006 Reference Material II 23-Mar-2021 Image SegmentationMajety S LskshmiNo ratings yet
- TD1 ImageDocument2 pagesTD1 ImageHassene SeddikNo ratings yet
- 10 Image Segmentation April 2019Document20 pages10 Image Segmentation April 2019Eng DlovanNo ratings yet
- Edge Detection: Phil Mlsna, PH.DDocument34 pagesEdge Detection: Phil Mlsna, PH.Dعلي كامل الاسديNo ratings yet
- UntitledDocument61 pagesUntitledduonglacbkNo ratings yet
- Image Segmentation: Subject: FIP (181102) Prof. Asodariya Bhavesh ECD, SSASIT, SuratDocument59 pagesImage Segmentation: Subject: FIP (181102) Prof. Asodariya Bhavesh ECD, SSASIT, Suratnarasimhan kumaraveluNo ratings yet
- Math Formula All Collection PDFDocument75 pagesMath Formula All Collection PDFEr S Karthick AnnamalaiNo ratings yet
- Aphs of The Trigonometric Ratio FunctionsDocument4 pagesAphs of The Trigonometric Ratio Functionsarg456No ratings yet
- Math of FingerprintDocument55 pagesMath of FingerprintMarishka KavtaradzeNo ratings yet
- Lec3 Image Segmentation-DpatraDocument146 pagesLec3 Image Segmentation-DpatraRitunjay GuptaNo ratings yet
- MA211 Test 1 Solution Semester 1 2017Document6 pagesMA211 Test 1 Solution Semester 1 2017Kavineel KumarNo ratings yet
- Scale Invariant Feature Transform (SIFT) : CS 763 Ajit RajwadeDocument52 pagesScale Invariant Feature Transform (SIFT) : CS 763 Ajit RajwadeashuraNo ratings yet
- Mvse-101 PdeDocument123 pagesMvse-101 PdeShivam SharmaNo ratings yet
- Finite Difference Methods Dirichlet Type Boundary ConditionDocument7 pagesFinite Difference Methods Dirichlet Type Boundary ConditionShivam SharmaNo ratings yet
- Fea HandoutsDocument51 pagesFea HandoutsDr.A.Maniram KumarNo ratings yet
- Image SegmentationDocument40 pagesImage SegmentationArga Bz1No ratings yet
- Image Segmentation-Upload1Document41 pagesImage Segmentation-Upload1Monark MehtaNo ratings yet
- Digital Image ProcessingDocument12 pagesDigital Image Processingshilpa8a8sNo ratings yet
- SIFT TransformDocument50 pagesSIFT Transformk191292 Hassan JamilNo ratings yet
- Lecture 15Document12 pagesLecture 15trantuantu31032004No ratings yet
- Lecture Rectangular WaveguideDocument34 pagesLecture Rectangular WaveguideBill WhiteNo ratings yet
- (MAA 2.13-2.15) RATIONAL AND MODULUS FUNCTIONS - INEQUALITIES - SolutionsDocument11 pages(MAA 2.13-2.15) RATIONAL AND MODULUS FUNCTIONS - INEQUALITIES - SolutionsarmNo ratings yet
- Computational MethodsDocument7 pagesComputational Methodssamikasan0516No ratings yet
- Noise Reduction and Object Enhancement in Passive Millimeter Wave Concealed Weapon DetectionDocument4 pagesNoise Reduction and Object Enhancement in Passive Millimeter Wave Concealed Weapon DetectionhukumaramNo ratings yet
- Maths Assignment 2 QuestionsDocument2 pagesMaths Assignment 2 QuestionsLayan NandNo ratings yet
- PT 1 Limits and ContinuityDocument2 pagesPT 1 Limits and ContinuityChristine EvangelistaNo ratings yet
- Question 1 - Harris Corner Detection (20 Points)Document7 pagesQuestion 1 - Harris Corner Detection (20 Points)HiroNo ratings yet
- Name of The Student: Branch: Unit - I (Vector Calculus) Simple Problems On Vector CalculusDocument9 pagesName of The Student: Branch: Unit - I (Vector Calculus) Simple Problems On Vector Calculussiva sivaNo ratings yet
- Materi 07. Edge Detection: Pengolahan CitraDocument75 pagesMateri 07. Edge Detection: Pengolahan CitraUsepMSaepullohNo ratings yet
- Standard Deviation B PharmaDocument8 pagesStandard Deviation B Pharmasonu chippaNo ratings yet
- B.E./B.Tech. Degree Examinations, November/December 2016: Find The Unit Normal To at (1, 1,-1)Document26 pagesB.E./B.Tech. Degree Examinations, November/December 2016: Find The Unit Normal To at (1, 1,-1)B Vignesh BabuNo ratings yet
- VFX HW2Document4 pagesVFX HW2評No ratings yet
- Ip 6Document39 pagesIp 6Ram GaneshNo ratings yet
- Lesson 10-6 Surface Integrals PDFDocument7 pagesLesson 10-6 Surface Integrals PDFAnonymous 5v9deValNo ratings yet
- C18 Computer Vision Edge DetectionDocument38 pagesC18 Computer Vision Edge DetectionnerinconqNo ratings yet
- Module 3 Image SegmentationDocument296 pagesModule 3 Image SegmentationruikarsachinNo ratings yet
- 5-SpatialFiltering 2Document74 pages5-SpatialFiltering 2pham tamNo ratings yet
- Lesson 4 VC.03 LagrangeDocument9 pagesLesson 4 VC.03 LagrangeSri RaghavanNo ratings yet
- 7.4 Quotient Rule 3Document3 pages7.4 Quotient Rule 3Hin Wa LeungNo ratings yet
- Spectral Partitioning: One Way To Slice A Problem in HalfDocument23 pagesSpectral Partitioning: One Way To Slice A Problem in HalfWeb devNo ratings yet
- Image Segmentation, Representation and DescriptionDocument40 pagesImage Segmentation, Representation and DescriptionButta Rajasekhar100% (1)
- 2.13 Optimization Problems SolutionsDocument5 pages2.13 Optimization Problems SolutionsEdwin QuintoNo ratings yet
- Electromagnetics, Antennas and Propagation NotesDocument85 pagesElectromagnetics, Antennas and Propagation NotesAnum AhmedNo ratings yet
- Junior NMTC 16Document16 pagesJunior NMTC 16All RounderNo ratings yet
- Ap Calculus Quiz 2C: LimitsDocument9 pagesAp Calculus Quiz 2C: LimitsteachopensourceNo ratings yet
- PHYS 102 FOURTH Lecture, August, 2020 PDFDocument20 pagesPHYS 102 FOURTH Lecture, August, 2020 PDFUtsav PathakNo ratings yet
- Engineering Mathematics MaterialDocument7 pagesEngineering Mathematics MaterialRajkumarNo ratings yet
- Digital Holo FRFTDocument34 pagesDigital Holo FRFTJesus RuizNo ratings yet
- Spatial Filters in Image ProcessingDocument68 pagesSpatial Filters in Image ProcessingMudassir RafiqNo ratings yet
- Design Charts For Clamped Orthotropic PlatesDocument9 pagesDesign Charts For Clamped Orthotropic PlatesJuan CarlosNo ratings yet
- X-Ray Pinhole Cameras - Operation, Analysis and ApplicationsDocument17 pagesX-Ray Pinhole Cameras - Operation, Analysis and ApplicationsHiedy ToralbaNo ratings yet
- Worsheet EngDocument3 pagesWorsheet EngRajalakshmi MohandhossNo ratings yet
- F IitersDocument76 pagesF IitersRajalakshmi MohandhossNo ratings yet
- Arithmetic EncodingDocument4 pagesArithmetic EncodingRajalakshmi MohandhossNo ratings yet
- DIP Topics To Be Studied For CT-1Document2 pagesDIP Topics To Be Studied For CT-1Rajalakshmi MohandhossNo ratings yet
- Filters FormulaeDocument5 pagesFilters FormulaeRajalakshmi MohandhossNo ratings yet
- DIP Topics To Be Studied For CT-1Document2 pagesDIP Topics To Be Studied For CT-1Rajalakshmi MohandhossNo ratings yet
- 2014 - Elsevier - A Review of Biometric Technology Along With Trends and ProspectsDocument16 pages2014 - Elsevier - A Review of Biometric Technology Along With Trends and ProspectsRajalakshmi MohandhossNo ratings yet
- 2015 - Elsevier - Hardware Implementation of Palm Vein Biometric Modality For Access Control in Multilayered Security SystemDocument7 pages2015 - Elsevier - Hardware Implementation of Palm Vein Biometric Modality For Access Control in Multilayered Security SystemRajalakshmi MohandhossNo ratings yet
- 2012 - Elsevier - A Novel Biometric System Based On Palm Vein ImageDocument9 pages2012 - Elsevier - A Novel Biometric System Based On Palm Vein ImageRajalakshmi MohandhossNo ratings yet
- A Survey of Finger Vein RecognitionDocument2 pagesA Survey of Finger Vein RecognitionRajalakshmi MohandhossNo ratings yet
- 2015 - Elsevier - Hardware Implementation of Palm Vein Biometric Modality For Access Control in Multilayered Security SystemDocument7 pages2015 - Elsevier - Hardware Implementation of Palm Vein Biometric Modality For Access Control in Multilayered Security SystemRajalakshmi MohandhossNo ratings yet
- 2014 - Elsevier - A Review of Biometric Technology Along With Trends and ProspectsDocument16 pages2014 - Elsevier - A Review of Biometric Technology Along With Trends and ProspectsRajalakshmi MohandhossNo ratings yet
- 2012 - Elsevier - A Novel Biometric System Based On Palm Vein ImageDocument9 pages2012 - Elsevier - A Novel Biometric System Based On Palm Vein ImageRajalakshmi MohandhossNo ratings yet
- Lecture 1 Introduction To DIP (10.1.19)Document54 pagesLecture 1 Introduction To DIP (10.1.19)Rajalakshmi MohandhossNo ratings yet
- Google MapsDocument1 pageGoogle MapsRajalakshmi MohandhossNo ratings yet
- A Survey of Finger Vein RecognitionDocument2 pagesA Survey of Finger Vein RecognitionRajalakshmi MohandhossNo ratings yet
- 2010-Elsevier-A Survey of Emerging Biometric ModalitiesDocument6 pages2010-Elsevier-A Survey of Emerging Biometric ModalitiesRajalakshmi MohandhossNo ratings yet
- Block DiagramDocument1 pageBlock DiagramRajalakshmi MohandhossNo ratings yet
- Welcome Students!: Week 8 (3 Quarter)Document28 pagesWelcome Students!: Week 8 (3 Quarter)Erika Lloren Luyun-GaliaNo ratings yet
- Course Progression Map For 2021 Commencing Students: E3001 Bachelor of Engineering (Honours) Common First YearDocument21 pagesCourse Progression Map For 2021 Commencing Students: E3001 Bachelor of Engineering (Honours) Common First YearNguyễn An KhoaNo ratings yet
- Violet Flame Clearing of The Heart ServiceDocument16 pagesViolet Flame Clearing of The Heart ServiceMySecret Gardenmdp82% (11)
- Chapter 14 Chemical EquilibriumDocument29 pagesChapter 14 Chemical EquilibriumlynloeNo ratings yet
- Mobile Network Optimization MapDocument1 pageMobile Network Optimization MapShahzad Farooq100% (1)
- My Version of Meatlaof Project DraftDocument3 pagesMy Version of Meatlaof Project DraftCloue Faye I. BasalloNo ratings yet
- Ceph Reference ArchitectureDocument12 pagesCeph Reference ArchitectureGermgmaan100% (1)
- FT Aeroterme GEADocument15 pagesFT Aeroterme GEACrisTimNo ratings yet
- Fs 1100 Flame Simulator Data Sheet en Us 584524Document4 pagesFs 1100 Flame Simulator Data Sheet en Us 584524Rildon Valqui CiezaNo ratings yet
- Reverse Phrase Action Camera LightsDocument40 pagesReverse Phrase Action Camera LightsDINDO AzucenaNo ratings yet
- 3 Pipe Mod For Vectra BDocument2 pages3 Pipe Mod For Vectra BEmirhan DöngelNo ratings yet
- Fair Directory 02-2016Document44 pagesFair Directory 02-2016Ravichandran SNo ratings yet
- Chemistry of Food Changes During Storage: Group 7Document22 pagesChemistry of Food Changes During Storage: Group 7Sonny MichaelNo ratings yet
- SK716 Pengintegrasian Mekanisme Nilai Karbon (English)Document13 pagesSK716 Pengintegrasian Mekanisme Nilai Karbon (English)Isti HanifahNo ratings yet
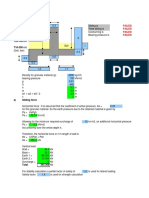
- Sliding, Overturning, Bearing Pressure and Bending Reinforcement Calculations for Retaining WallDocument4 pagesSliding, Overturning, Bearing Pressure and Bending Reinforcement Calculations for Retaining WallAbdul Aziz Julkarnain ZulkifliNo ratings yet
- Learn More: National Weather ServiceDocument2 pagesLearn More: National Weather Servicedamien boyerNo ratings yet
- Encore 700 Diaphragm Pump 1Document12 pagesEncore 700 Diaphragm Pump 1bagurtoNo ratings yet
- Fire and Blast in The Future OffshoreDocument45 pagesFire and Blast in The Future OffshoredrgNo ratings yet
- Tables and Bar ChartsDocument7 pagesTables and Bar ChartsVictoria FedoseevaNo ratings yet
- ĐỀ SỐ 2Document98 pagesĐỀ SỐ 2van hoa nguyenNo ratings yet
- Tooth Development, Eruption & Applied Aspects: Saurabh Roy 09.03.2016Document95 pagesTooth Development, Eruption & Applied Aspects: Saurabh Roy 09.03.2016reema aslamNo ratings yet
- Cs Project Book ManagementDocument22 pagesCs Project Book ManagementabNo ratings yet
- IAL Edexcel Pure Math 1 January 2020Document28 pagesIAL Edexcel Pure Math 1 January 2020Mohamed Said Daw100% (4)
- API 510 BasicsDocument40 pagesAPI 510 BasicsBalakumarNo ratings yet
- Brochure - 2018 - Hitfact Mkii 2Document2 pagesBrochure - 2018 - Hitfact Mkii 2diaa ahmedNo ratings yet
- MD R2 Nastran Release GuideDocument276 pagesMD R2 Nastran Release GuideMSC Nastran BeginnerNo ratings yet
- Resource Guide: Three Phase PowerDocument8 pagesResource Guide: Three Phase PowerddNo ratings yet
- Common Mistakes in Dimensional Calibration MethodsDocument16 pagesCommon Mistakes in Dimensional Calibration MethodssujudNo ratings yet
- Top 21 Largest EMS Companies in WorldDocument22 pagesTop 21 Largest EMS Companies in WorldjackNo ratings yet
- S2 Papers FinalizedDocument149 pagesS2 Papers FinalizedRaffles HolmesNo ratings yet