You might also like
- Fuzzy Control Systems Design and Analysis: A Linear Matrix Inequality ApproachFrom EverandFuzzy Control Systems Design and Analysis: A Linear Matrix Inequality ApproachNo ratings yet
- ARMInst (1)Document58 pagesARMInst (1)Priti DhekneNo ratings yet
- ARMInst - UNIT 4Document64 pagesARMInst - UNIT 4MarupakaNo ratings yet
- The ARM Instruction SetDocument58 pagesThe ARM Instruction SetAggelos KouroumalosNo ratings yet
- IP Routing Protocols All-in-one: OSPF EIGRP IS-IS BGP Hands-on LabsFrom EverandIP Routing Protocols All-in-one: OSPF EIGRP IS-IS BGP Hands-on LabsNo ratings yet
- ARM Instruction Set OverviewDocument60 pagesARM Instruction Set OverviewDevid gakharNo ratings yet
- ROUTING INFORMATION PROTOCOL: RIP DYNAMIC ROUTING LAB CONFIGURATIONFrom EverandROUTING INFORMATION PROTOCOL: RIP DYNAMIC ROUTING LAB CONFIGURATIONNo ratings yet
- Assembly Arm 7Document75 pagesAssembly Arm 7Thanh NguyenNo ratings yet
- The ARM Instruction Set: Advanced RISC MachinesDocument11 pagesThe ARM Instruction Set: Advanced RISC MachinesGilberto VirgilioNo ratings yet
- Esdl4 PPSXDocument71 pagesEsdl4 PPSXPrasad JadhavNo ratings yet
- ARM - Advanced RISC Machines: RISC-Reduce Instruction Set ComputersDocument60 pagesARM - Advanced RISC Machines: RISC-Reduce Instruction Set Computershitesh bonamNo ratings yet
- C Sec Eiot Unit3Document23 pagesC Sec Eiot Unit3209X1A0467 KOTLA ANUSHANo ratings yet
- arm proseccorDocument198 pagesarm proseccorshreyansh.saurav21No ratings yet
- Arm ProcessorDocument92 pagesArm ProcessorReddappa ReddyNo ratings yet
- ARM Founded in November 1990: Advanced RISC MachinesDocument27 pagesARM Founded in November 1990: Advanced RISC MachinesArkajyoti SahaNo ratings yet
- ARM Basic HelpDocument48 pagesARM Basic HelpKOMAL SONINo ratings yet
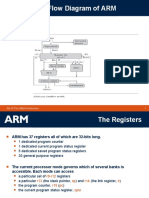
- Data Flow Diagram of ARM: 1 39v10 The ARM ArchitectureDocument7 pagesData Flow Diagram of ARM: 1 39v10 The ARM ArchitectureMohnishNo ratings yet
- Arm BriefDocument29 pagesArm BriefJoginder YadavNo ratings yet
- 3 ARM ProcessorDocument33 pages3 ARM ProcessorRandell cookNo ratings yet
- ARM Embedded Hardware Design Lecture on Processor Models and RegistersDocument42 pagesARM Embedded Hardware Design Lecture on Processor Models and RegistersD StarNo ratings yet
- ARM Has 7 Operating Modes ARM Has 7 Operating Modes: - Fa F Fa FDocument18 pagesARM Has 7 Operating Modes ARM Has 7 Operating Modes: - Fa F Fa FSampathhhhh Sai TadepalliNo ratings yet
- ESD Reference PDFDocument81 pagesESD Reference PDFswap14327No ratings yet
- ARM ArchitectureDocument85 pagesARM ArchitectureGurram KishoreNo ratings yet
- ARM Architecture GuideDocument25 pagesARM Architecture GuideRohith ThurlapatiNo ratings yet
- ARM Architecture GuideDocument25 pagesARM Architecture GuideRohith ThurlapatiNo ratings yet
- The ARM Architecture The ARM ArchitectureDocument26 pagesThe ARM Architecture The ARM ArchitecturesudhirNo ratings yet
- ARM Architecture OverviewDocument44 pagesARM Architecture Overviewpraneeth chinthireddyNo ratings yet
- ARM 7 Programmers ModelDocument2 pagesARM 7 Programmers Modelsoumya salianNo ratings yet
- Lecture 3Document88 pagesLecture 3Praveen RathnamNo ratings yet
- Arm Exploitation PDFDocument57 pagesArm Exploitation PDFjokllNo ratings yet
- Stack Examples: r5 r4 r3 r1 r0 SP r5 r4 r3 r1 r0 SPDocument2 pagesStack Examples: r5 r4 r3 r1 r0 SP r5 r4 r3 r1 r0 SPGilberto VirgilioNo ratings yet
- 1.evolution and Improvement of ARM ArchitectDocument35 pages1.evolution and Improvement of ARM ArchitectRohini0% (1)
- Arm Instruction ProgramDocument121 pagesArm Instruction ProgramErmin KatardzicNo ratings yet
- ARM Thumb Instruction Set GuideDocument37 pagesARM Thumb Instruction Set GuideBaskar ArumugamNo ratings yet
- Thumb InstructionsDocument43 pagesThumb InstructionsJyothi B.R.No ratings yet
- Arm FundamentalsDocument32 pagesArm FundamentalsSatyanarayana SankuNo ratings yet
- Lec Arm PDFDocument25 pagesLec Arm PDFspaulsNo ratings yet
- ARM Instr Set PDFDocument116 pagesARM Instr Set PDFnaveenNo ratings yet
- ARM ProcessorDocument88 pagesARM ProcessorAyan AcharyaNo ratings yet
- Transitioning From ARM v7 To ARM v8 - All The Basics Your Must KnowDocument18 pagesTransitioning From ARM v7 To ARM v8 - All The Basics Your Must KnowTuyen DinhNo ratings yet
- ARM Instruction Set IntroductionDocument32 pagesARM Instruction Set IntroductionRiver AbodNo ratings yet
- ARM Instruction Sets and Program: Jin-Fu Li Department of Electrical Engineering National Central UniversityDocument116 pagesARM Instruction Sets and Program: Jin-Fu Li Department of Electrical Engineering National Central UniversityRANJITHANo ratings yet
- Module 4Document82 pagesModule 4Rakesh LodhiNo ratings yet
- Computer ArchitectureDocument16 pagesComputer ArchitectureJerika Marie Valdez MartinezNo ratings yet
- The First EncounterDocument44 pagesThe First EncounterRANJITHANo ratings yet
- ARM7,9,11 ProcessorDocument34 pagesARM7,9,11 Processorharshad lokhandeNo ratings yet
- Arm AssemblyDocument76 pagesArm AssemblyQuan DehatNo ratings yet
- Chapter 6: Introduction To ARM Memory and Assembly LanguageDocument46 pagesChapter 6: Introduction To ARM Memory and Assembly LanguageVeer KumarNo ratings yet
- ARM - An Understanding and MoreDocument87 pagesARM - An Understanding and MoreSivasini Netra S ANo ratings yet
- The ARM Instruction Set: Advanced RISC MachinesDocument58 pagesThe ARM Instruction Set: Advanced RISC MachinesarthicseNo ratings yet
- The Programmer's ModelDocument12 pagesThe Programmer's ModelMohammed AlzaaninNo ratings yet
- ARMDocument44 pagesARMBiplab RoyNo ratings yet
- InterruptsDocument28 pagesInterruptsJuan Pablo IñigoNo ratings yet
- Embedded Systems ProgrammingDocument28 pagesEmbedded Systems ProgrammingAbdallah AdelNo ratings yet
- ARM Founded in November 1990: Advanced RISC MachinesDocument45 pagesARM Founded in November 1990: Advanced RISC MachinesaesyopNo ratings yet
- ArmDocument44 pagesArmSiva SankaranNo ratings yet
- Computers and Processors: Reference ManualDocument40 pagesComputers and Processors: Reference ManualbarryNo ratings yet
- GDC 2012 March 5-9: Runtime CPU Performance Spike Detection Using Manual and Compiler Automated InstrumentationDocument9 pagesGDC 2012 March 5-9: Runtime CPU Performance Spike Detection Using Manual and Compiler Automated InstrumentationMarkNo ratings yet
- Topic 4 HierarchyDocument2 pagesTopic 4 HierarchyECE TheivanayakiNo ratings yet
- Topic 5 Procedures and AssignmentsDocument3 pagesTopic 5 Procedures and AssignmentsECE TheivanayakiNo ratings yet
- Verilog Operators GuideDocument4 pagesVerilog Operators GuideECE TheivanayakiNo ratings yet
- Unit 5 Verilog HDL Topic 1 &2 Basics of The VERILOG LanguageDocument8 pagesUnit 5 Verilog HDL Topic 1 &2 Basics of The VERILOG LanguageECE TheivanayakiNo ratings yet
- ARM Architecture Versions & Features in 40 CharactersDocument46 pagesARM Architecture Versions & Features in 40 CharactersECE TheivanayakiNo ratings yet
- ECE Embedded SyllabusDocument2 pagesECE Embedded SyllabusArun John M RNo ratings yet
- R300 Modbus Training - TAC Training - 2004-09-00Document12 pagesR300 Modbus Training - TAC Training - 2004-09-00lopez.garyjavierNo ratings yet
- Modbus Registers Map-Conext CL 60E & CL 60ADocument14 pagesModbus Registers Map-Conext CL 60E & CL 60Ajmanaya1986No ratings yet
- Oracle Database Migration From Solaris To Linux On NutanixDocument23 pagesOracle Database Migration From Solaris To Linux On NutanixAdi YusupNo ratings yet
- Variable-Length Encoding (VLE)Document168 pagesVariable-Length Encoding (VLE)electron_glowNo ratings yet
- 18CS44 Module3Document196 pages18CS44 Module3SharanKumarHuliNo ratings yet
- Xge Mac SpecDocument24 pagesXge Mac Spechackdrag100% (1)
- Weather Sensor RF ProtocolsDocument40 pagesWeather Sensor RF ProtocolsBobBobsunNo ratings yet
- Communication Protocol of PV Grid-Connected String Inverters V1.1.53 ENDocument41 pagesCommunication Protocol of PV Grid-Connected String Inverters V1.1.53 ENSamuel Gonçalves100% (2)
- Name Description: The File FormatsDocument15 pagesName Description: The File FormatsTimematcherNo ratings yet
- All C & DS Interview QuestionsDocument551 pagesAll C & DS Interview QuestionsRashmi NambiarNo ratings yet
- Reference Guide: TMS320C6000 DSP External Memory Interface (EMIF)Document146 pagesReference Guide: TMS320C6000 DSP External Memory Interface (EMIF)Ahmed AyyubNo ratings yet
- Xantrex - Modbus Serial Communications Protocol SpecificationDocument104 pagesXantrex - Modbus Serial Communications Protocol SpecificationTelemachusSneezed100% (1)
- COA question bank on computer organization and architectureDocument10 pagesCOA question bank on computer organization and architectureVenkat RamNo ratings yet
- Enabling Heterogeneous, Multicore SoC ResearchDocument7 pagesEnabling Heterogeneous, Multicore SoC ResearchBoul chandra GaraiNo ratings yet
- Introduction To SAE J1939 - CyberBoat 2022Document88 pagesIntroduction To SAE J1939 - CyberBoat 2022Jérémie Royer-AudetNo ratings yet
- GPS.G2 X 01003 BDocument101 pagesGPS.G2 X 01003 BRuddy MolinaNo ratings yet
- Proc Emb Ch3Document55 pagesProc Emb Ch3Jihene ZgolliNo ratings yet
- GW-7552 (Modbus RTU Master) Example For SIMATIC STEP 7Document65 pagesGW-7552 (Modbus RTU Master) Example For SIMATIC STEP 7AdelmoKarigNo ratings yet
- Ch5-TCP Client Server ExampleDocument47 pagesCh5-TCP Client Server ExampleSandeep KhandekarNo ratings yet
- Computer Organization and Architecture by William StallingsDocument101 pagesComputer Organization and Architecture by William Stallingsmotumbo motúmbezNo ratings yet
- Tersus Data Communication Programming ManualDocument274 pagesTersus Data Communication Programming ManualLucio Jr Molina50% (6)
- An Introduction To Computer NetworksDocument479 pagesAn Introduction To Computer NetworksBob SchneiderNo ratings yet
- Cs54 System SoftwareDocument131 pagesCs54 System Softwarego4nagarajuNo ratings yet
- SQL Server Auditing On AwsDocument27 pagesSQL Server Auditing On AwsManuela KuczynskaNo ratings yet
- Ffmpeg CodecsDocument12 pagesFfmpeg CodecsRodrigo SantosNo ratings yet
- ARM Cortex M4 ArchitectureDocument44 pagesARM Cortex M4 ArchitectureTrần Võ Khôi Nguyên100% (1)
- SC Compiler Users GuideDocument263 pagesSC Compiler Users GuidejesusfvNo ratings yet
- Unit 1 Introduction To Processing UnitsDocument68 pagesUnit 1 Introduction To Processing UnitsAhan Tejaswi100% (1)
- User Manual - NanoVNA V2Document1 pageUser Manual - NanoVNA V2Andrea FasatoNo ratings yet
- EWARM CompilerReferenceDocument242 pagesEWARM CompilerReferenceelectronarutoNo ratings yet