You might also like
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977From EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977No ratings yet
- 300 MW Variable Speed Drives For Pump-Storage Plant Application GoldisthalDocument24 pages300 MW Variable Speed Drives For Pump-Storage Plant Application GoldisthalMiguel Esteban MartinezNo ratings yet
- Designing of Load Response Generation Synchronized 15MW Hydropower Station and Simulation Based Electromechanical and Structural AnalysisDocument17 pagesDesigning of Load Response Generation Synchronized 15MW Hydropower Station and Simulation Based Electromechanical and Structural AnalysismilanNo ratings yet
- Catálogo Turbinas GilkesDocument12 pagesCatálogo Turbinas GilkesEdú Brizuela100% (1)
- Epilux 5: Product DescriptionDocument2 pagesEpilux 5: Product DescriptionShyam ShrishNo ratings yet
- Black Start Diesel Gen. SystemDocument29 pagesBlack Start Diesel Gen. SystemعليفاضلNo ratings yet
- Hydro Power Plant Governor Testing Using Hardware-In-The-Loop SimulationDocument4 pagesHydro Power Plant Governor Testing Using Hardware-In-The-Loop Simulationemilzaev01No ratings yet
- Converting To Variable Speed at A Pumped-Storage PlantDocument9 pagesConverting To Variable Speed at A Pumped-Storage Plantle hoai NamNo ratings yet
- Micro Turbine Generating SystemDocument12 pagesMicro Turbine Generating SystemRajesh CharyNo ratings yet
- A ProjectDocument26 pagesA ProjectSumit ChauhanNo ratings yet
- Mtech Hydro Power EngineeringDocument12 pagesMtech Hydro Power Engineeringsudheer MNo ratings yet
- A. Mitsubishi Generator Set Diesel Lineup From EuropeDocument8 pagesA. Mitsubishi Generator Set Diesel Lineup From Europeyudi handokoNo ratings yet
- ECEN 667 Power System Stability: Lecture 13: Governors, PID ControllersDocument45 pagesECEN 667 Power System Stability: Lecture 13: Governors, PID ControllersManuelNo ratings yet
- TidongDocument162 pagesTidongSandeep AggarwalNo ratings yet
- Design and Contruction of Automatic Phase Selector PDFDocument51 pagesDesign and Contruction of Automatic Phase Selector PDFKadiri IbrahimNo ratings yet
- Origonal Larji ReportDocument53 pagesOrigonal Larji ReportNishant Verma50% (4)
- Simulation of Virtual Inertia For A 2MW PMSGDocument34 pagesSimulation of Virtual Inertia For A 2MW PMSGElahe Hoseini NasabNo ratings yet
- Active and Reactive Power Control of A Variable Speed Pumped Storage SystemDocument7 pagesActive and Reactive Power Control of A Variable Speed Pumped Storage SystemDeepak GehlotNo ratings yet
- Hydro Black Start - May2019 PDFDocument75 pagesHydro Black Start - May2019 PDFMohd Izham IdrisNo ratings yet
- Simulation Model of Hydro Power PlantDocument7 pagesSimulation Model of Hydro Power Plantwoldemariam workuNo ratings yet
- Calculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsDocument8 pagesCalculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsWalter SantiNo ratings yet
- HYDRO Power Plant PresentationDocument35 pagesHYDRO Power Plant PresentationM Hamza NadeemNo ratings yet
- THYRIPOL Operating InstructionsDocument310 pagesTHYRIPOL Operating InstructionsCristian VillalbaNo ratings yet
- Chapter 2Document14 pagesChapter 2Harsha VardhanNo ratings yet
- 4 - Brochure Francis-TurbinesDocument5 pages4 - Brochure Francis-Turbinesmamok supraptoNo ratings yet
- Hydro Electric Power Plant AutomationDocument39 pagesHydro Electric Power Plant AutomationMd Abdul RahemanNo ratings yet
- Hydro Plant BasicsDocument12 pagesHydro Plant BasicsPrasanna DharmapriyaNo ratings yet
- Guidelines For Acceptance Examiantion and Concurrence of Detailed Project Reports For Pumped Storage SchemesDocument71 pagesGuidelines For Acceptance Examiantion and Concurrence of Detailed Project Reports For Pumped Storage Schemespankaj kumar guptaNo ratings yet
- Ancillary - Services - 2c Technical University of DenmarkDocument70 pagesAncillary - Services - 2c Technical University of DenmarkQuique MoralesNo ratings yet
- SELEKhrhhCIJA HIDROTURBINADocument107 pagesSELEKhrhhCIJA HIDROTURBINADalibor-Jelena VlaškiNo ratings yet
- Gogte Institute of Technology: Dr.V.N.SatwikDocument16 pagesGogte Institute of Technology: Dr.V.N.Satwikaditya thakkarNo ratings yet
- Abebe HandoutDocument113 pagesAbebe HandoutFasika Tegegn100% (1)
- 007 Kaplan 10 PaginasDocument11 pages007 Kaplan 10 PaginasricardoNo ratings yet
- V S DDocument17 pagesV S DveguruprasadNo ratings yet
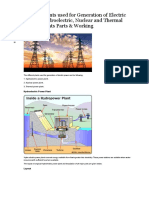
- Various Plants Used For Generation of Electric Power Hydroelectric, Nuclear and Thermal Energy Plants Parts & WorkingDocument6 pagesVarious Plants Used For Generation of Electric Power Hydroelectric, Nuclear and Thermal Energy Plants Parts & WorkingWilson FuentesNo ratings yet
- Wind Energy Generation Modelling and ControlDocument8 pagesWind Energy Generation Modelling and Controljuniorj123No ratings yet
- Dynamic Modeling, Design of A Wind/fuel Cell/ultra-Capacitor-Based Hybrid Power Generation SystemDocument16 pagesDynamic Modeling, Design of A Wind/fuel Cell/ultra-Capacitor-Based Hybrid Power Generation SystemYellaturi Siva Kishore ReddyNo ratings yet
- Non-Minimum Phase TheoryDocument6 pagesNon-Minimum Phase TheoryTrung NguyenNo ratings yet
- Akshata pbl1Document4 pagesAkshata pbl1sangeetadineshNo ratings yet
- Pelton Turbine Design ScopeDocument19 pagesPelton Turbine Design ScopeFakethe Ferrit100% (1)
- Micro Hydro: Guidance Manual of Procedures For Assessment of Micro Hydro PotentialDocument261 pagesMicro Hydro: Guidance Manual of Procedures For Assessment of Micro Hydro Potentialjamjam75No ratings yet
- Under Water Windmill PresentationDocument19 pagesUnder Water Windmill PresentationAtishay KumarNo ratings yet
- Guide For The Selection and Application of Energy-Efficient Motors PDFDocument10 pagesGuide For The Selection and Application of Energy-Efficient Motors PDFEliseu RibeiroNo ratings yet
- Digital Turbine GovernorDocument5 pagesDigital Turbine GovernorsherryNo ratings yet
- GEA33306 BN Hydro Application Guide - R7Document48 pagesGEA33306 BN Hydro Application Guide - R7Viet DinhTrongNo ratings yet
- WindmillDocument23 pagesWindmillManav KohliNo ratings yet
- Hollias Macs Dcs Overview Kmacsv6 v1.1 2021Document33 pagesHollias Macs Dcs Overview Kmacsv6 v1.1 2021Валентин МазаевNo ratings yet
- Highly Efficient Cross Flow Turbine Runner Design For Upgrading Traditional Water Mill in To Micro Hydro Power Plant (A Case Study For Kersa-Minko Village)Document5 pagesHighly Efficient Cross Flow Turbine Runner Design For Upgrading Traditional Water Mill in To Micro Hydro Power Plant (A Case Study For Kersa-Minko Village)Anonymous LHGQqOBNo ratings yet
- Pumped Storage HydroelectricityDocument6 pagesPumped Storage Hydroelectricitybekku100% (1)
- Tamar Hydro Turbines Product ProfileDocument12 pagesTamar Hydro Turbines Product ProfileДимитър ДимановNo ratings yet
- For Data Center Power Systems: Mitsubishi Generator SeriesDocument8 pagesFor Data Center Power Systems: Mitsubishi Generator Seriesmas zak danielNo ratings yet
- Edoc - Pub - 31 Turbine and Governing PDFDocument90 pagesEdoc - Pub - 31 Turbine and Governing PDFsureshNo ratings yet
- Power Plant Design Assignment-3 BELDocument14 pagesPower Plant Design Assignment-3 BELPRAKASH POKHRELNo ratings yet
- Wilo Water Supply PDFDocument752 pagesWilo Water Supply PDFSanjeevNo ratings yet
- Effect of Load Shedding Strategy On Interconnected Power Systems Stability When A Blackout OccursDocument6 pagesEffect of Load Shedding Strategy On Interconnected Power Systems Stability When A Blackout OccursMoon3pellNo ratings yet
- Induction and Synchronous Motor FundamentalsDocument10 pagesInduction and Synchronous Motor Fundamentalshozipek5599100% (1)
- Powin Enclosures Product Manual Rev B01Document51 pagesPowin Enclosures Product Manual Rev B01melihguneriNo ratings yet
- Grid Converters for Photovoltaic and Wind Power SystemsFrom EverandGrid Converters for Photovoltaic and Wind Power SystemsRating: 4.5 out of 5 stars4.5/5 (4)
- List NotesDocument27 pagesList NotesMohit MauryaNo ratings yet
- SAE-J1850 Communication Protocol Conformity Transmission Controller For Automotive LANDocument59 pagesSAE-J1850 Communication Protocol Conformity Transmission Controller For Automotive LANMa Ngoc TrungNo ratings yet
- Three-Dimensional Lithium-Ion Battery ModelDocument35 pagesThree-Dimensional Lithium-Ion Battery ModelmortezagashtiNo ratings yet
- Corrosion Performance of Mild Steel and GalvanizedDocument18 pagesCorrosion Performance of Mild Steel and GalvanizedNarasimha DvlNo ratings yet
- Mechanics of Structure IIDocument3 pagesMechanics of Structure IIvenkata369No ratings yet
- 3 CR Portfolio Dec2012Document94 pages3 CR Portfolio Dec2012mlatif12No ratings yet
- Concept Note For The Conversion of 75 TPHDocument2 pagesConcept Note For The Conversion of 75 TPHMeera MishraNo ratings yet
- AdsorptionDocument20 pagesAdsorptionNoreen Guiyab TannaganNo ratings yet
- Subjects Revised Curriculum BS ELECTRICAL ENGINEERINGDocument18 pagesSubjects Revised Curriculum BS ELECTRICAL ENGINEERINGData StatsNo ratings yet
- Project Report On Modulation (Class 12)Document14 pagesProject Report On Modulation (Class 12)Shivam Tripathi100% (9)
- RF Optimization Tips - TCH Block Rate Optimization Tips in Huawei GSMDocument4 pagesRF Optimization Tips - TCH Block Rate Optimization Tips in Huawei GSMdolisieNo ratings yet
- Chapter 6: Fatigue Failure: Introduction, Basic ConceptsDocument21 pagesChapter 6: Fatigue Failure: Introduction, Basic ConceptsNick MezaNo ratings yet
- State-Of-The-Art of Battery State-Of-Charge DeterminationDocument19 pagesState-Of-The-Art of Battery State-Of-Charge Determinationyasvanthkumar sNo ratings yet
- Assignments CHSSCDocument7 pagesAssignments CHSSCphani12_chem5672No ratings yet
- Sociology ZulfiqarDocument31 pagesSociology ZulfiqarHasnain HilbiNo ratings yet
- Pump Station System Curves Session 1Document29 pagesPump Station System Curves Session 1Toan LeNo ratings yet
- Atomic Structure ActivityDocument4 pagesAtomic Structure ActivityClarisse BonaobraNo ratings yet
- S1Agile EN RN I.1 PDFDocument10 pagesS1Agile EN RN I.1 PDFCorey PorterNo ratings yet
- Web Application Penetration TestingDocument11 pagesWeb Application Penetration TestingRohitNo ratings yet
- CG Mod 3Document51 pagesCG Mod 3Misba nausheenNo ratings yet
- Understanding The Relationship Between Human Behavior and Susceptibility To Cyber AttacksDocument25 pagesUnderstanding The Relationship Between Human Behavior and Susceptibility To Cyber AttacksVelibor SabanNo ratings yet
- Asset Failure Detention Codes (ICMS - PAM - ZN - SECR 312)Document5 pagesAsset Failure Detention Codes (ICMS - PAM - ZN - SECR 312)mukesh lachhwani100% (1)
- PLCC-28: FeaturesDocument5 pagesPLCC-28: Features肖磊No ratings yet
- Soal ElectrochemistryDocument3 pagesSoal ElectrochemistryHerlinda OktaNo ratings yet
- Normativ Panouri SandwichDocument58 pagesNormativ Panouri SandwichAlex ChiraNo ratings yet
- Instruction Manual B-Tronic SystemDocument35 pagesInstruction Manual B-Tronic SystemYipper ShnipperNo ratings yet
- Planets and Solar System The Complete Manual 2016Document132 pagesPlanets and Solar System The Complete Manual 2016Sonechka Sonya100% (3)
- SeqP&D GPL Met enDocument52 pagesSeqP&D GPL Met enSriram ChNo ratings yet
- HabilitationDocument186 pagesHabilitationAland MediaNo ratings yet
- Stack008 V2Document1 pageStack008 V2Kryštof PaličkaNo ratings yet