You might also like
- Conceptual Programming: Conceptual Programming: Learn Programming the old way!From EverandConceptual Programming: Conceptual Programming: Learn Programming the old way!No ratings yet
- Computer Science & Engineering II B.Tech. - II Semester: Department ofDocument32 pagesComputer Science & Engineering II B.Tech. - II Semester: Department ofTalluru Aditya Prakash Talluru Venkata Siva RamakrishnaNo ratings yet
- CST202 Module 5 - I/O Organization, Memory Systems, and InterruptsDocument34 pagesCST202 Module 5 - I/O Organization, Memory Systems, and InterruptsJoel K SanthoshNo ratings yet
- Module2 CoDocument29 pagesModule2 CoRajamma JNo ratings yet
- TIE CO Module 2Document10 pagesTIE CO Module 2RamanNo ratings yet
- IO OpeartionsDocument19 pagesIO OpeartionsMuthukumar ManickamNo ratings yet
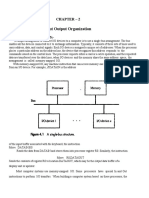
- Input Output Organization: Chapter - 2Document22 pagesInput Output Organization: Chapter - 2Rahul JainNo ratings yet
- Input/ Output Organization: Accessing I/O DevicesDocument12 pagesInput/ Output Organization: Accessing I/O DevicesGahan A V Gowda100% (1)
- CO - Lecture 10Document11 pagesCO - Lecture 10Daddy YouNo ratings yet
- MODULE 4 Input Output OrganizationDocument96 pagesMODULE 4 Input Output OrganizationMadhura N KNo ratings yet
- COA Module 3 BEC306CDocument14 pagesCOA Module 3 BEC306Csachinksr007No ratings yet
- Architecture IIDocument158 pagesArchitecture IIGafeer FableNo ratings yet
- Module 2Document39 pagesModule 2gjtuyNo ratings yet
- Input-Output Organization: 1 DR - HSN Swamy, Dos in CS, Uom, MGMDocument58 pagesInput-Output Organization: 1 DR - HSN Swamy, Dos in CS, Uom, MGMkumarNo ratings yet
- Input Output Organisation: BY: Vaishakh B N USN:1RV09CS1114Document62 pagesInput Output Organisation: BY: Vaishakh B N USN:1RV09CS1114Vaishakh BaragurNo ratings yet
- CO Module 2 PPTDocument83 pagesCO Module 2 PPTIshu ishuNo ratings yet
- Input / Output Operations - Input / Output OperationsDocument49 pagesInput / Output Operations - Input / Output OperationsRavi TejNo ratings yet
- Input/Output Organization: I/O) Devices, Which Can Be Connected To A Computer. The Input MayDocument37 pagesInput/Output Organization: I/O) Devices, Which Can Be Connected To A Computer. The Input MayRohan RNo ratings yet
- Input Output OperationsDocument9 pagesInput Output OperationsJEEVANANTHAM GNo ratings yet
- Define Peripherals. Explain I/O Bus and Interface ModulesDocument15 pagesDefine Peripherals. Explain I/O Bus and Interface ModulesSai RamNo ratings yet
- Chapter3-Io OrganizationDocument77 pagesChapter3-Io OrganizationPUNITH KUMAR VM100% (1)
- Computer Architecture Notes VIIDocument12 pagesComputer Architecture Notes VIIUnisa SakhaNo ratings yet
- Computer Architecture Unit NotesDocument30 pagesComputer Architecture Unit NotesBalaji Shanmugam100% (1)
- Basic I/O System Design: Department of Computer Science & Engineering BRAC UniversityDocument30 pagesBasic I/O System Design: Department of Computer Science & Engineering BRAC UniversityLHKNo ratings yet
- Week 7 (Input Output Organisation) (MFRDT)Document29 pagesWeek 7 (Input Output Organisation) (MFRDT)Mohamed Abdirashid AhmedNo ratings yet
- Accessing I/O Devices: V. Saranya Ap/Cse Sri Vidya College of Engg & TechDocument21 pagesAccessing I/O Devices: V. Saranya Ap/Cse Sri Vidya College of Engg & Techroy_nhpNo ratings yet
- Module3 Io OrganizationDocument57 pagesModule3 Io OrganizationDr Dilip RNo ratings yet
- Module 2Document37 pagesModule 2Amruta KhangaonkarNo ratings yet
- CO Module 2 NotesDocument55 pagesCO Module 2 NotesEragon ShadeSlayerNo ratings yet
- UNIT IV-R20 CaoDocument80 pagesUNIT IV-R20 Caokiran281196No ratings yet
- COMPUTER ARCHITECTUR - NotesDocument31 pagesCOMPUTER ARCHITECTUR - NotesgcghNo ratings yet
- L13 Input Output OrganizationDocument57 pagesL13 Input Output OrganizationRajdeep BoraNo ratings yet
- Computer Architecture and OrganizationDocument13 pagesComputer Architecture and Organizationdhruba717No ratings yet
- Accessing Io Devices in System MemoryDocument4 pagesAccessing Io Devices in System Memoryrohit sharmaNo ratings yet
- Computer Organization-Chapter 9Document9 pagesComputer Organization-Chapter 9Bipin MasalNo ratings yet
- Co Module V 2020Document34 pagesCo Module V 2020jinto0007No ratings yet
- Computer Organization and Architecture (18EC35) - Input/Output Organization (Module 3)Document82 pagesComputer Organization and Architecture (18EC35) - Input/Output Organization (Module 3)Shrishail Bhat50% (2)
- Unit 4Document48 pagesUnit 4Anmol D. PradhanNo ratings yet
- Unit IVCAO NotesDocument67 pagesUnit IVCAO NotesAshish PalandurkarNo ratings yet
- CA Classes-266-270Document5 pagesCA Classes-266-270SrinivasaRaoNo ratings yet
- Archtecture of CPUDocument8 pagesArchtecture of CPUsathishinvincibleNo ratings yet
- Unit 4Document53 pagesUnit 4Brajesh KumarNo ratings yet
- IO OrganizationDocument99 pagesIO OrganizationBaji vali SkNo ratings yet
- q3 MerDocument78 pagesq3 Merf20220301No ratings yet
- Input-Output OrganizationDocument39 pagesInput-Output OrganizationTamanna SharmaNo ratings yet
- Unit Iii - IDocument26 pagesUnit Iii - Iy22cd125No ratings yet
- Accessing I/O DevicesDocument33 pagesAccessing I/O DevicesKishore SKNo ratings yet
- Input Output Processing (8086)Document31 pagesInput Output Processing (8086)Tech_MX50% (4)
- Chapter 9Document64 pagesChapter 9Sabin MaharjanNo ratings yet
- A394982016 16523 11 2019 Chapter8.00Document39 pagesA394982016 16523 11 2019 Chapter8.00yogesh kumarNo ratings yet
- In Put Out Put OrganizationDocument45 pagesIn Put Out Put OrganizationdevibalaNo ratings yet
- IO Module Computer ArchitectureDocument15 pagesIO Module Computer Architecturehweoo100% (2)
- Embedded 2Document38 pagesEmbedded 2SHUBHANKAR SONINo ratings yet
- Accessing I/O Devices: Processor MemoryDocument22 pagesAccessing I/O Devices: Processor Memorysreedhar_vkNo ratings yet
- CAO Unit 1-IDocument50 pagesCAO Unit 1-IvbknukwcysgycpmlzsNo ratings yet
- Interface CircuitsDocument9 pagesInterface CircuitsSRUTHI. SNo ratings yet
- Computer Organization and Architecture 18EC35: Course Handling Faculty: Gahan A VDocument72 pagesComputer Organization and Architecture 18EC35: Course Handling Faculty: Gahan A VDeepshikhaNo ratings yet
- 15CS34 Co Module2 Notes PDFDocument63 pages15CS34 Co Module2 Notes PDFdeepa G RNo ratings yet
- COA Unit3 NotesDocument47 pagesCOA Unit3 Notesindia16112003nationNo ratings yet
- Dx79to Productguide01 EnglishDocument86 pagesDx79to Productguide01 EnglishLucas BarichelloNo ratings yet
- Shipping: Mitac PD14TI (Intel D2500HN) (Intel Atom 2x 1.86Ghz CPU) (FANLESS)Document2 pagesShipping: Mitac PD14TI (Intel D2500HN) (Intel Atom 2x 1.86Ghz CPU) (FANLESS)Nicodemo DatiNo ratings yet
- SCX-5835FN Parts PDFDocument73 pagesSCX-5835FN Parts PDFNestor MoralesNo ratings yet
- ASM Experiment 2 - Interrupts, Strings and Common InstructionsDocument7 pagesASM Experiment 2 - Interrupts, Strings and Common InstructionsCasandra Victorio Kua RNNo ratings yet
- CorelDRAW Graphics Suite X7Document40 pagesCorelDRAW Graphics Suite X7robyNo ratings yet
- Adc0808 and 8253Document35 pagesAdc0808 and 8253Avanish NiranjanNo ratings yet
- Overlay Karate ComentadoDocument2 pagesOverlay Karate ComentadoElizeu SmartcellNo ratings yet
- Penjualan All Januari 2024Document206 pagesPenjualan All Januari 2024ryanoke22No ratings yet
- Pricelist PCDocument27 pagesPricelist PCsamNo ratings yet
- E18905 PRIME B560M-A v2 UM WEBDocument34 pagesE18905 PRIME B560M-A v2 UM WEBatlasflame777No ratings yet
- Easyavr v7 Manual v101Document32 pagesEasyavr v7 Manual v101MarkoStankovicNo ratings yet
- Abb Ag: ApplicationDocument4 pagesAbb Ag: ApplicationvigneshwaranNo ratings yet
- Duplicate a HASP, HASP4 or HASP HL USB or Parallel Port DongleDocument11 pagesDuplicate a HASP, HASP4 or HASP HL USB or Parallel Port Dongleklicktime3No ratings yet
- Android Device WhitelistDocument26 pagesAndroid Device Whitelistalireza ghassemiNo ratings yet
- Operating Systems ClassificationDocument1 pageOperating Systems ClassificationKenji IgnacioNo ratings yet
- Pinout Leonardo LatestDocument3 pagesPinout Leonardo LatesthakyNo ratings yet
- Fundamentals Computing GuideDocument58 pagesFundamentals Computing GuideJeffin JosephNo ratings yet
- SC1602 16x2 Characters Serial LCD ModuleDocument12 pagesSC1602 16x2 Characters Serial LCD ModuleDương TiếnNo ratings yet
- Optimize Serial-ATA RAID Card GuideDocument31 pagesOptimize Serial-ATA RAID Card GuideluisalbertolopezNo ratings yet
- Computer Crossword Puzzle Answer KeyDocument1 pageComputer Crossword Puzzle Answer KeyFajar HermawanNo ratings yet
- Guide To Assembly Code-TMS320C5xDocument314 pagesGuide To Assembly Code-TMS320C5xSivaranjan Goswami0% (1)
- Unplugged Clean LogDocument5 pagesUnplugged Clean LogDebabrata DasburmanNo ratings yet
- Topic 4 - Introduction To C Programming LanguageDocument8 pagesTopic 4 - Introduction To C Programming LanguageGrace NameNo ratings yet
- Lesson 1 History of Computer by Ibook Development GroupDocument24 pagesLesson 1 History of Computer by Ibook Development GroupChad Drahc100% (1)
- CategoryDocument590 pagesCategoryFail ProjectNo ratings yet
- UNIX Kernel Architecture OverviewDocument28 pagesUNIX Kernel Architecture OverviewRajeevDuttNo ratings yet
- AD2550B-ITX ManualDocument39 pagesAD2550B-ITX ManualCatalin NitaNo ratings yet
- Compaq Evo n610c Service ManualDocument217 pagesCompaq Evo n610c Service ManualdarreljNo ratings yet
- Quiz 2aDocument5 pagesQuiz 2aad11010010No ratings yet
- 41 Programmer Bios Tl866csDocument5 pages41 Programmer Bios Tl866cspeterson_msc5No ratings yet