You might also like
- Guidelines Adhd AdultDocument19 pagesGuidelines Adhd AdultJavier Cotobal100% (1)
- The Story GridDocument346 pagesThe Story Gridjoel3edwards97% (36)
- Hack and SlashDocument38 pagesHack and Slashyo100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Answers of Power Electronics NewDocument9 pagesAnswers of Power Electronics NewSyed ZabiullahNo ratings yet
- Chapter 3 (PERFORMANCE MANAGEMENT AND STRATEGIC PLANNING)Document18 pagesChapter 3 (PERFORMANCE MANAGEMENT AND STRATEGIC PLANNING)shakeelakousar24100% (2)
- 10 InvertersDocument136 pages10 InverterszapzahtNo ratings yet
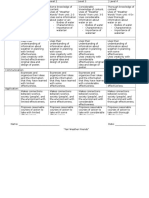
- Science Culminating Task RubricDocument2 pagesScience Culminating Task Rubricapi-311644452No ratings yet
- Focus 2011 WiringDocument139 pagesFocus 2011 Wiringphalksturm100% (1)
- Chargeman Download Full InfoDocument43 pagesChargeman Download Full InfoMohd Izham Idris83% (6)
- Aura and Chakra 3Document88 pagesAura and Chakra 3Theodore Yiannopoulos100% (2)
- MC Murray InverterDocument92 pagesMC Murray InverterGnanaseharan Arunachalam100% (5)
- Pet Industry in India and ChinaDocument9 pagesPet Industry in India and Chinanetizenarjun20048945No ratings yet
- Chapter 3 - Single Phase InverterDocument20 pagesChapter 3 - Single Phase InverterMuhammad Izz IzzuddinNo ratings yet
- Static Var CompensatorDocument29 pagesStatic Var CompensatorCarlos Fabian GallardoNo ratings yet
- Ac Voltage Controller Circuits: Unit-8Document49 pagesAc Voltage Controller Circuits: Unit-8Naeemo IraqiNo ratings yet
- 2.2 Conventional Methods of Speed Control: Unit-Ii DC DrivesDocument47 pages2.2 Conventional Methods of Speed Control: Unit-Ii DC DrivesrajeshNo ratings yet
- Ac Voltage Controllers: V Variable AC RMS O/P Voltage AC Input Voltage F V FDocument6 pagesAc Voltage Controllers: V Variable AC RMS O/P Voltage AC Input Voltage F V Fcr_neethishNo ratings yet
- Unit - V Ac Voltage Controller and Cycloconverter (Rms Voltage Controllers)Document45 pagesUnit - V Ac Voltage Controller and Cycloconverter (Rms Voltage Controllers)Catlin KaraNo ratings yet
- PEC Lecture Slide Inverter TurkceDocument43 pagesPEC Lecture Slide Inverter Turkcemdur67No ratings yet
- CHAPTER 8 - Synchronous Machine Transient AnalysisDocument64 pagesCHAPTER 8 - Synchronous Machine Transient AnalysisMohd A IshakNo ratings yet
- ECE 8830 - Electric Drives: Topic 17: Wound-Field Synchronous Machine DrivesDocument62 pagesECE 8830 - Electric Drives: Topic 17: Wound-Field Synchronous Machine DrivesMohamed BerririNo ratings yet
- DC Motor - Drive 2019Document80 pagesDC Motor - Drive 2019ali ramadanNo ratings yet
- Section 2 Intro To DC Motor DrivesDocument52 pagesSection 2 Intro To DC Motor DrivesMak YabuNo ratings yet
- Assignment: AddedDocument39 pagesAssignment: Addedfuh kingsleyNo ratings yet
- FALLSEM2021-22 EEE3004 ETH VL2021220100810 Reference Material I 16-Aug-2021 7 Controlled Rectifier NewDocument51 pagesFALLSEM2021-22 EEE3004 ETH VL2021220100810 Reference Material I 16-Aug-2021 7 Controlled Rectifier NewVAHEESNo ratings yet
- Unit - I: Basic Performance Equations of D.C. MotorsDocument21 pagesUnit - I: Basic Performance Equations of D.C. MotorsNoah AdityaNo ratings yet
- What Is An Inverter?: Classification of InvertersDocument11 pagesWhat Is An Inverter?: Classification of Invertersayash mohantyNo ratings yet
- Government Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesDocument18 pagesGovernment Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & Drivesshashi kumarNo ratings yet
- Government Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesDocument18 pagesGovernment Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesVK DNo ratings yet
- Machines Lab ManualDocument124 pagesMachines Lab ManualpurushothNo ratings yet
- Wound-Field Synchronous Machine DrivesDocument62 pagesWound-Field Synchronous Machine DrivesKorlpate BhaskarNo ratings yet
- Абдураимов - RSES 2020Document4 pagesАбдураимов - RSES 2020OtabekNo ratings yet
- Chapter 5Document38 pagesChapter 5Markos NiguseNo ratings yet
- Module-3 (B) - AC Controllers - VII-POWER ELECTRONICS - 2015-17 SchemeDocument48 pagesModule-3 (B) - AC Controllers - VII-POWER ELECTRONICS - 2015-17 SchemeK N DEEPSHINo ratings yet
- Module 2Document22 pagesModule 2canusha820No ratings yet
- L15B Thyristors and Controlled Rectifier 03012024 030403pmDocument11 pagesL15B Thyristors and Controlled Rectifier 03012024 030403pmvaneeza ahmedNo ratings yet
- 5 - AC-AC Converters (Compatibility Mode)Document32 pages5 - AC-AC Converters (Compatibility Mode)OmkarNo ratings yet
- ECE 8830 - Electric Drives - LCIDocument62 pagesECE 8830 - Electric Drives - LCIAirton FloresNo ratings yet
- Exp 2Document6 pagesExp 2College ISMNo ratings yet
- ACVC Material PDFDocument75 pagesACVC Material PDFramakrishnaprasad908No ratings yet
- 15EC73 - PE - Mod 3 - QB - 12102019 PDFDocument35 pages15EC73 - PE - Mod 3 - QB - 12102019 PDFAishwaryaNo ratings yet
- Exp-9 11Document4 pagesExp-9 11Dave Pooja DilipkumarNo ratings yet
- Unit - Ii Ac To DC ConvertersDocument88 pagesUnit - Ii Ac To DC Converters310239 ktr.eee.17No ratings yet
- Part 2 (DC MOTOR CONTROL)Document45 pagesPart 2 (DC MOTOR CONTROL)Jimmy Tan100% (1)
- ELE8331 Power System Control Dr. Nuraddeen MagajiDocument25 pagesELE8331 Power System Control Dr. Nuraddeen MagajiumarsaboNo ratings yet
- EET 421 Power Electronic Drives: Indra NisjaDocument48 pagesEET 421 Power Electronic Drives: Indra Nisjaaswardi8756No ratings yet
- Single Phase Rectifier Fed DC Motor DriveDocument11 pagesSingle Phase Rectifier Fed DC Motor DriveNitesh kumar singh100% (1)
- Inverter and ChopperDocument92 pagesInverter and ChopperGnanaseharan ArunachalamNo ratings yet
- Unit - Ii Single Phase and Three Phase Controlled RectifiersDocument36 pagesUnit - Ii Single Phase and Three Phase Controlled RectifiersSukhpal Singh100% (2)
- Chater-2 TransformerrsDocument62 pagesChater-2 TransformerrsAman BazeNo ratings yet
- InverterDocument93 pagesInverterABCDNo ratings yet
- S.NO. 1 Single Phase Half Wave Rectifier With R & RL Load AimDocument15 pagesS.NO. 1 Single Phase Half Wave Rectifier With R & RL Load AimShailendra KumarNo ratings yet
- Unit-4 InvertersDocument43 pagesUnit-4 InvertersbalafetNo ratings yet
- 02 Power ElectronicsDocument211 pages02 Power Electronicsకృష్ణ మురళి100% (2)
- Voltage Control With Using ThyristorDocument8 pagesVoltage Control With Using ThyristorAnucha YieNo ratings yet
- PEI Mod2@AzDOCUMENTS - inDocument68 pagesPEI Mod2@AzDOCUMENTS - inINDIAN LEGENDSNo ratings yet
- Tan Kien Hau (01Dem16F1004) ONG KANG WEI (01DEM16F1006) Lee Zhi Shern (01Dem16F1038) Zulhilmi (01Dem16F1007)Document18 pagesTan Kien Hau (01Dem16F1004) ONG KANG WEI (01DEM16F1006) Lee Zhi Shern (01Dem16F1038) Zulhilmi (01Dem16F1007)Eden HazardNo ratings yet
- Laboratory NR 6Document5 pagesLaboratory NR 6IonutNo ratings yet
- E1 - Controlled Rectifiers PDFDocument92 pagesE1 - Controlled Rectifiers PDFmitulNo ratings yet
- Problem Solve of Indutrial Electronics FinalDocument9 pagesProblem Solve of Indutrial Electronics FinalMd Raton AliNo ratings yet
- Three Phase InverterrsDocument21 pagesThree Phase InverterrsZack ZoldyckNo ratings yet
- Controlled Rectifier Single Phase Full WaveDocument7 pagesControlled Rectifier Single Phase Full WaveJesus BecerraNo ratings yet
- Unit 05: Single Phase DC-AC Converter (Transistor Based)Document20 pagesUnit 05: Single Phase DC-AC Converter (Transistor Based)vaibhav bodkheNo ratings yet
- Power Electronics Chapter#11Document25 pagesPower Electronics Chapter#11Bilal HussainNo ratings yet
- ECE 8830 - Electric Drives: Topic 9: Current-Fed InvertersDocument60 pagesECE 8830 - Electric Drives: Topic 9: Current-Fed InvertersKelvin LiewNo ratings yet
- D Unit 3Document11 pagesD Unit 3Abhishek ShyamalNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Social Studies Research Paper Rubric High SchoolDocument5 pagesSocial Studies Research Paper Rubric High Schoolnaneguf0nuz3100% (1)
- SCIDDocument9 pagesSCIDgarimaupadhyay20002No ratings yet
- 9Document16 pages9edmarian0% (1)
- ProgramDetails PDF 134Document2 pagesProgramDetails PDF 134samyakgaikwad12No ratings yet
- DLP Geothermal Power PlantDocument4 pagesDLP Geothermal Power PlantRigel Del CastilloNo ratings yet
- Imaginefx How To Draw and Paint Anatomy Volume 2Document116 pagesImaginefx How To Draw and Paint Anatomy Volume 2tofupastaNo ratings yet
- Impact of COVID-19 On Student LifeDocument10 pagesImpact of COVID-19 On Student LifeZunii MalikNo ratings yet
- 01-Thermal Integrity Profiler PDI USF TIPDocument2 pages01-Thermal Integrity Profiler PDI USF TIPAlexandru PoenaruNo ratings yet
- LFSR-Based Generation of Multi Cycle TestsDocument9 pagesLFSR-Based Generation of Multi Cycle TestsRatnakarVarun100% (1)
- Ewc CG 17 6Document942 pagesEwc CG 17 6Milan MarićNo ratings yet
- A Literary Voyage Into The Unconscious: A Philosophical Approach To The Psychological Novel in Woolf's Mrs. Dalloway (1925)Document10 pagesA Literary Voyage Into The Unconscious: A Philosophical Approach To The Psychological Novel in Woolf's Mrs. Dalloway (1925)Muhammad IbrahimNo ratings yet
- River System of BangladeshDocument3 pagesRiver System of Bangladeshtonmoy50% (2)
- Aceleradores Serie 6900Document2 pagesAceleradores Serie 6900jdavis5548No ratings yet
- A Simplified Guide To Oral Antipsychotic MedicationsDocument20 pagesA Simplified Guide To Oral Antipsychotic MedicationsBruno AlencarNo ratings yet
- Simcnc Python Scripts Guide enDocument53 pagesSimcnc Python Scripts Guide enÁron SzárazNo ratings yet
- Chapter 1 Intro To QualityDocument34 pagesChapter 1 Intro To QualityRonah Abigail BejocNo ratings yet
- ASV Program Guide v3.0Document53 pagesASV Program Guide v3.0Mithun LomateNo ratings yet
- Relationship With Josephine BrackenDocument9 pagesRelationship With Josephine BrackenNothingNo ratings yet
- RIZALDocument6 pagesRIZALElaine Key MarasiganNo ratings yet
- UMG 512 ProDocument12 pagesUMG 512 Propuikmutnb2No ratings yet
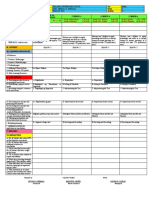
- DLL Q3 Week 4 Day5 WWDocument3 pagesDLL Q3 Week 4 Day5 WWCecilia Guevarra DumlaoNo ratings yet