You might also like
- Detoya Activity3Document17 pagesDetoya Activity3Jay Ian GeronaNo ratings yet
- Modeling Systems with Transfer Functions and State SpaceDocument15 pagesModeling Systems with Transfer Functions and State SpaceMaksud SarkerNo ratings yet
- Block Diagrams: Modeling and SimulationDocument48 pagesBlock Diagrams: Modeling and SimulationAbel CabaNo ratings yet
- Unit 2 - Control System - WWW - Rgpvnotes.inDocument17 pagesUnit 2 - Control System - WWW - Rgpvnotes.invikram singhNo ratings yet
- Block Diagram Representation: Loop or A Closed-Loop SystemDocument63 pagesBlock Diagram Representation: Loop or A Closed-Loop SystemaliNo ratings yet
- Unit 2 - Control Systems - www.rgpvnotes.inDocument16 pagesUnit 2 - Control Systems - www.rgpvnotes.inpeacepalharshNo ratings yet
- Delft: Matlab and Simulink For Modeling and ControlDocument12 pagesDelft: Matlab and Simulink For Modeling and Controlawan_krNo ratings yet
- Control Systems Engineering: Chapter 2: Modeling in The Frequency DomainDocument55 pagesControl Systems Engineering: Chapter 2: Modeling in The Frequency DomainAphichaya thanchaiNo ratings yet
- Electromagnetic Levitation Using MATLAB Real Time Control ToolboxDocument3 pagesElectromagnetic Levitation Using MATLAB Real Time Control Toolboxrobert1234567mNo ratings yet
- Exercise6 - Solution - Introduction For Embedded SystemsDocument9 pagesExercise6 - Solution - Introduction For Embedded Systemsquoctrung244No ratings yet
- Mathematical Modeling of Power DC/DC: ConvertersDocument6 pagesMathematical Modeling of Power DC/DC: ConvertersStudents Xerox ChidambaramNo ratings yet
- KINETICS OF PARTICLES WORK AND POTENTIAL ENERGYDocument42 pagesKINETICS OF PARTICLES WORK AND POTENTIAL ENERGYTucciy Alentine MaeNo ratings yet
- Mathematical Model: Topic Learning OutcomesDocument23 pagesMathematical Model: Topic Learning OutcomesAmirul Shahrin991109No ratings yet
- Proyecto 2 - Modelación de TerremotosDocument5 pagesProyecto 2 - Modelación de TerremotosMiguel Ángel GaitánNo ratings yet
- K-Notes Manual for Quick RevisionDocument33 pagesK-Notes Manual for Quick RevisionNitin MauryaNo ratings yet
- Module 10 With Solutions PDFDocument18 pagesModule 10 With Solutions PDFgavin_d265No ratings yet
- Department of Electromechanical Engineering Course Title: Control SystemDocument21 pagesDepartment of Electromechanical Engineering Course Title: Control SystemYidersal MarewNo ratings yet
- l6 PDFDocument11 pagesl6 PDFdanielNo ratings yet
- Computer Methods For Mechanical Engineering: Mathematical Modeling, Numerical Methods, and Problem SolvingDocument28 pagesComputer Methods For Mechanical Engineering: Mathematical Modeling, Numerical Methods, and Problem Solvingfemme.No ratings yet
- Haar Wavelet Basis: Roy Ha Justin RombergDocument9 pagesHaar Wavelet Basis: Roy Ha Justin Romberg306005No ratings yet
- CHP 2Document57 pagesCHP 2TEWODROS ASFAWNo ratings yet
- Kalman Filter TutorialDocument8 pagesKalman Filter TutorialupendarkalluNo ratings yet
- Satellite Attitude Control With Frequency DomainDocument32 pagesSatellite Attitude Control With Frequency DomainPythonraptorNo ratings yet
- Work and EnergyDocument28 pagesWork and EnergyMir'atun Nissa QuinalendraNo ratings yet
- Structure Analysis I Structure Analysis IDocument57 pagesStructure Analysis I Structure Analysis Ishaheen juttNo ratings yet
- On The Use of Wavelets Packet Decomposition For Time Series PredictionDocument12 pagesOn The Use of Wavelets Packet Decomposition For Time Series PredictionPradeep SinglaNo ratings yet
- Louise Lope Adonis Pabillaran - Activity 3Document11 pagesLouise Lope Adonis Pabillaran - Activity 3Louise Lope PabillaranNo ratings yet
- Dynamic Modeling of Mechanical, Electrical, Electro-Mechanical SystemDocument46 pagesDynamic Modeling of Mechanical, Electrical, Electro-Mechanical SystemRhizhail100% (1)
- SimulationDocument9 pagesSimulationgaraamohamed7No ratings yet
- GATE EC 2017 (Set - 2) QuestionsDocument8 pagesGATE EC 2017 (Set - 2) QuestionsZakariya MohammedNo ratings yet
- Chapter 3B - Work and EnergyDocument22 pagesChapter 3B - Work and Energyjaymart villarta100% (1)
- Laplace and Fourier Transform Analysis of Electric CircuitsDocument7 pagesLaplace and Fourier Transform Analysis of Electric CircuitsSwasti RanjanNo ratings yet
- Work and Energy PPT PDF FreeDocument15 pagesWork and Energy PPT PDF FreeBlve Charmie AmanteNo ratings yet
- Design and Implementation of Controlled Zeta Converter Power SupplyDocument8 pagesDesign and Implementation of Controlled Zeta Converter Power Supplyyarra tejaNo ratings yet
- Ch06 ISMDocument67 pagesCh06 ISMThai-Son LeNo ratings yet
- 高瞻計畫 - 振動學課程 Lecture 1: Single Degree of Freedom Systems (III)Document29 pages高瞻計畫 - 振動學課程 Lecture 1: Single Degree of Freedom Systems (III)mghgolNo ratings yet
- Discrete-Time Modeling of Clock Jitter in Continuous-Time: ΔΣ ModulatorsDocument4 pagesDiscrete-Time Modeling of Clock Jitter in Continuous-Time: ΔΣ ModulatorsAhsan TanveerNo ratings yet
- Chap 2Document35 pagesChap 2Temesgen MekonenNo ratings yet
- Lec 2 PID ControlDocument8 pagesLec 2 PID ControlAep Kusman HeriyantoNo ratings yet
- 2.2 Instantaneous Velocity and SpeedDocument3 pages2.2 Instantaneous Velocity and SpeedmikeNo ratings yet
- Lecture 2 - 02/09, 2012Document11 pagesLecture 2 - 02/09, 2012Maliha AkterNo ratings yet
- Transfer Function Modeling For The Buck Converter: Sanda Lefteriu Cécile LabarreDocument4 pagesTransfer Function Modeling For The Buck Converter: Sanda Lefteriu Cécile Labarre1balamanianNo ratings yet
- Matlab and Simulink For Modeling and ControlDocument13 pagesMatlab and Simulink For Modeling and ControlnevesunipampaNo ratings yet
- Made For Science Quanser Ball and Beam CoursewareStud MATLAB PDFDocument32 pagesMade For Science Quanser Ball and Beam CoursewareStud MATLAB PDFBui ThuyNo ratings yet
- Solution Set 5Document11 pagesSolution Set 5WalterKopterNo ratings yet
- DocumentdsdDocument28 pagesDocumentdsdannNo ratings yet
- Short Impulses. Dirac's Delta Function. Partial Fractions: CHAP. 6 Laplace TransformsDocument2 pagesShort Impulses. Dirac's Delta Function. Partial Fractions: CHAP. 6 Laplace TransformsShinobiNo ratings yet
- Voltage Tracking of A Multi-Input InterleavedDocument4 pagesVoltage Tracking of A Multi-Input InterleavedREYES APOLONIO CASTRO CORRALNo ratings yet
- AP10005 - Physics I AP10008 - University Physics I: Energy of A System & Conservation of EnergyDocument30 pagesAP10005 - Physics I AP10008 - University Physics I: Energy of A System & Conservation of EnergyShibu AlexanderNo ratings yet
- Vibration Control: Nejat OlgacDocument16 pagesVibration Control: Nejat OlgacSreenath MNo ratings yet
- Wavelets For Kids ADocument26 pagesWavelets For Kids ArahnemaaNo ratings yet
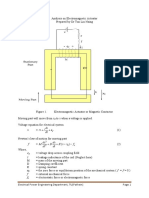
- Analysis On Magnetic Actuator (Basic of Energy Convertion)Document4 pagesAnalysis On Magnetic Actuator (Basic of Energy Convertion)pablo barrosoNo ratings yet
- 2.performance GeethaDocument8 pages2.performance Geethaiaset123No ratings yet
- capacitor 1 with solution (1)Document2 pagescapacitor 1 with solution (1)Issam ShafieNo ratings yet
- Production FunctionDocument7 pagesProduction FunctionKennara pradipta IdnNo ratings yet
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- Chapter 6. Time-Varying Fields and Maxwell's EquationsDocument6 pagesChapter 6. Time-Varying Fields and Maxwell's Equations채정우No ratings yet
- Chapter 9. Transmission LinesDocument28 pagesChapter 9. Transmission Lines채정우No ratings yet
- Chapter 05 Part2Document14 pagesChapter 05 Part2채정우No ratings yet
- Smith Chart, Coloured VersionDocument1 pageSmith Chart, Coloured VersionBurhan UL HaqueNo ratings yet
- The Laplace Transform in Circuit AnalysisDocument79 pagesThe Laplace Transform in Circuit Analysis채정우No ratings yet
- The Laplace Transform in Circuit AnalysisDocument79 pagesThe Laplace Transform in Circuit Analysis채정우No ratings yet
- Lecture Note 20Document15 pagesLecture Note 20채정우No ratings yet
- Sinusoidal Steady - State Power CalculationsDocument48 pagesSinusoidal Steady - State Power Calculations채정우No ratings yet
- Balanced Three-Phase CircuitsDocument44 pagesBalanced Three-Phase Circuits채정우No ratings yet
- Lecture #19: pn Junction Transient ResponseDocument14 pagesLecture #19: pn Junction Transient Response채정우No ratings yet
- pn Junctions Charge ControlDocument8 pagespn Junctions Charge Control채정우No ratings yet
- Lecture #17: Outline - PN Junctions (Cont'd) - Deviations From The Ideal I-VDocument15 pagesLecture #17: Outline - PN Junctions (Cont'd) - Deviations From The Ideal I-V채정우No ratings yet
- Lecture #4: Outline - Band Gap Energy - Density of States - DopingDocument13 pagesLecture #4: Outline - Band Gap Energy - Density of States - DopingdsfeeNo ratings yet
- BEETLE /M-II Plus: POS System For The Highest Standards of PerformanceDocument2 pagesBEETLE /M-II Plus: POS System For The Highest Standards of PerformanceHeather JensenNo ratings yet
- Logix 5000 CIP Sync ConfigurationDocument180 pagesLogix 5000 CIP Sync Configurationاحتشام چوہدریNo ratings yet
- Electronics, Furniture, Clothing and Home Stores in KalkaDocument4 pagesElectronics, Furniture, Clothing and Home Stores in KalkaMANSA MARKETINGNo ratings yet
- CHAPTER 8 The Rise of Instrumental Music - 141-152Document8 pagesCHAPTER 8 The Rise of Instrumental Music - 141-152Aleksandre Roderick-LorenzNo ratings yet
- MCAS Forces and Equilibrium PracticeDocument51 pagesMCAS Forces and Equilibrium PracticeSyd MalaxosNo ratings yet
- (Eng) Advanced Concept Training - 2d Concrete Members en 1992 - 2017Document69 pages(Eng) Advanced Concept Training - 2d Concrete Members en 1992 - 2017Muscadin MakensonNo ratings yet
- CA ruling on fertilizer disputeDocument16 pagesCA ruling on fertilizer disputeRuby Anna TorresNo ratings yet
- Effect of land use change on property valuesDocument3 pagesEffect of land use change on property valueseesuola akinyemiNo ratings yet
- Kole 2010Document12 pagesKole 2010Steven Mestres-JunqueNo ratings yet
- Labview ProgrammingDocument20 pagesLabview ProgrammingJames WoodNo ratings yet
- Case 26 Star River Electronics - Group Thạch Trung Chương HiểnDocument12 pagesCase 26 Star River Electronics - Group Thạch Trung Chương HiểnTrương ThạchNo ratings yet
- W 2HotlineContacts2019 - 0 2 PDFDocument3 pagesW 2HotlineContacts2019 - 0 2 PDFNathan Townsend Levy100% (1)
- Giáo trình TACN Đồ họa 1 - 2021 - chính thứcDocument57 pagesGiáo trình TACN Đồ họa 1 - 2021 - chính thứcHeo BiểnNo ratings yet
- Mana Paribhsha RSBKDocument31 pagesMana Paribhsha RSBKlohiyakankshaNo ratings yet
- Daniel Fast Recipes A Couple CooksDocument12 pagesDaniel Fast Recipes A Couple CooksmariamNo ratings yet
- Duoc Dien Duoc Lieu Dai Loan - 3rd - 2019Document639 pagesDuoc Dien Duoc Lieu Dai Loan - 3rd - 2019Hương Nguyễn100% (1)
- FREE BioGeometry Emitter PhotoDocument5 pagesFREE BioGeometry Emitter PhotoNisha Joshi75% (8)
- Acros Organics Acta N°006Document20 pagesAcros Organics Acta N°006Atomer FormationNo ratings yet
- 404handler PDFDocument33 pages404handler PDFAnonymous JijwlW7No ratings yet
- Phil. Crocodile-WPS OfficeDocument19 pagesPhil. Crocodile-WPS OfficeQUEENIE JAM ABENOJANo ratings yet
- ADC0804 Datasheet - ADC 0804 Pin Diagram & Description - EngineersGarageDocument3 pagesADC0804 Datasheet - ADC 0804 Pin Diagram & Description - EngineersGarageMehanathan Maggie MikeyNo ratings yet
- 1 A Simulation Based Model For The BerthDocument9 pages1 A Simulation Based Model For The Berthmonu_vitsNo ratings yet
- PPF Pumps CatalogDocument112 pagesPPF Pumps Catalogesau hernandezNo ratings yet
- 1ST Quarter Exam Mapeh 8Document7 pages1ST Quarter Exam Mapeh 8John Rey Manolo BaylosisNo ratings yet
- Master Gardener Home Vegetable Guide: Chapter 1 - Gardening BasicsDocument30 pagesMaster Gardener Home Vegetable Guide: Chapter 1 - Gardening BasicsAmr M. SaidNo ratings yet
- Lubricated Coupling TrainingDocument47 pagesLubricated Coupling TrainingTheerayootNo ratings yet
- Why Am I Getting Temperature Divergence in AMG SolverDocument7 pagesWhy Am I Getting Temperature Divergence in AMG SolverSulaimanNo ratings yet
- Silent Spring: What's InsideDocument22 pagesSilent Spring: What's InsideDelina TedrosNo ratings yet
- Case Study of Haleeb FoodDocument18 pagesCase Study of Haleeb Foodjazi_4u86% (22)
- 1 An Overview of Physical and Phase ChangeDocument5 pages1 An Overview of Physical and Phase ChangeGede KrishnaNo ratings yet