You might also like
- IDT SyncE-wander-test WHP 20180216Document10 pagesIDT SyncE-wander-test WHP 20180216Mohammad JafariNo ratings yet
- Deterministic EthernetDocument56 pagesDeterministic EthernetHissam HanifNo ratings yet
- Com:Dtu: Router Design and FunctionalityDocument68 pagesCom:Dtu: Router Design and FunctionalityIftikhar JavedNo ratings yet
- Comparison of Time Sensitive Networking (TSN) and TTEthernetDocument7 pagesComparison of Time Sensitive Networking (TSN) and TTEthernetsmyethdrath24No ratings yet
- Revolution Network Diagram As On 1 Oct 2020Document1 pageRevolution Network Diagram As On 1 Oct 2020KyawNo ratings yet
- 02 EtherCAT Introduction PDFDocument95 pages02 EtherCAT Introduction PDFPablo Andrés Sanhueza CarvajalNo ratings yet
- 8 Port Fiber QSFP 10/1 Gigabit Ethernet Timesync Pci Express Server AdapterDocument3 pages8 Port Fiber QSFP 10/1 Gigabit Ethernet Timesync Pci Express Server AdapterBo LiuNo ratings yet
- P410G8TS81 TimeSync Server Adapter STS2 PDFDocument4 pagesP410G8TS81 TimeSync Server Adapter STS2 PDFgameOverNo ratings yet
- Datasheet: Rev A.04 - October 2019Document6 pagesDatasheet: Rev A.04 - October 2019Jubin R GuptaNo ratings yet
- CH 01Document11 pagesCH 01Fadhli RahimNo ratings yet
- Manipulating Packets With MikroTikDocument28 pagesManipulating Packets With MikroTikBenya NamsaNo ratings yet
- CMPE 150 - Winter 2009: January 13, 2009 yDocument73 pagesCMPE 150 - Winter 2009: January 13, 2009 ysai420No ratings yet
- 4CAE000429 ABB XMC20 COGE5 - English - WebDocument2 pages4CAE000429 ABB XMC20 COGE5 - English - Webmarija.bandic1No ratings yet
- EthDocument72 pagesEthAnonymous cR4J37Ny0% (2)
- Mgate Eip3000Document3 pagesMgate Eip3000Nicolas RochaNo ratings yet
- Ethernet FrameDocument8 pagesEthernet FrameФаридун МардановNo ratings yet
- Topic 5.1 - EthernetDocument11 pagesTopic 5.1 - EthernetKevin NdyabandihoNo ratings yet
- Jitter and Wander Measurements in SyncE NetworksDocument24 pagesJitter and Wander Measurements in SyncE Networkskutti17No ratings yet
- 05 - Module de Communication Modbus TCP Rx3iDocument13 pages05 - Module de Communication Modbus TCP Rx3iZouhair IguerhzifenNo ratings yet
- FibeAir IP-20E DatasheetDocument4 pagesFibeAir IP-20E DatasheetrgualbertNo ratings yet
- Cambium Networks Data Sheet PTP 820SDocument9 pagesCambium Networks Data Sheet PTP 820SYataqaNo ratings yet
- EDS-518E - Series DatasheetDocument2 pagesEDS-518E - Series DatasheetAdlan IzamNo ratings yet
- Evaluation of Timing Characteristics of A Prototype System Based On PROFINET IO RT Class 3Document8 pagesEvaluation of Timing Characteristics of A Prototype System Based On PROFINET IO RT Class 3Gene LiNo ratings yet
- Tellabs Access SwitchDocument3 pagesTellabs Access SwitchVelly George OgbonnaNo ratings yet
- Core Tj1400 18 Slot PTNDocument2 pagesCore Tj1400 18 Slot PTNnannuNo ratings yet
- TCPLow Sigcomm 2001Document176 pagesTCPLow Sigcomm 2001feerozbthapaNo ratings yet
- GB - SS1012 - E01 - 1 ZXG10 iTC Introduction 42Document42 pagesGB - SS1012 - E01 - 1 ZXG10 iTC Introduction 42noumizredhaNo ratings yet
- 802 1CBdbDocument18 pages802 1CBdbfly2beyondgmail.comNo ratings yet
- Raiscom DatasheetDocument2 pagesRaiscom Datasheetbang_ay88No ratings yet
- InternetworkingDocument46 pagesInternetworkingWaliul BariNo ratings yet
- Ether TypeDocument4 pagesEther Typeujwala_512No ratings yet
- Ethernet ProtocolDocument24 pagesEthernet Protocolsachin palNo ratings yet
- PTN 6110 Packet Transport Product Hardware IntroductionDocument35 pagesPTN 6110 Packet Transport Product Hardware IntroductionLova100% (1)
- Ethernet - Wikipedia, The Free EncyclopediaDocument17 pagesEthernet - Wikipedia, The Free EncyclopediaManitNo ratings yet
- TNF5UXCMDocument16 pagesTNF5UXCMVictor AlbaneziNo ratings yet
- 9Ch NMEA (Serial) Ethernet GatewayDocument16 pages9Ch NMEA (Serial) Ethernet GatewayEvgeny YudinNo ratings yet
- IDT NextGenTimingFabric OVR 20170221Document4 pagesIDT NextGenTimingFabric OVR 20170221Mohammad JafariNo ratings yet
- Gps TDD Lte Lab: V1.0 Create by Zhangcheney V1.1 Improve by ZhangbinbingDocument12 pagesGps TDD Lte Lab: V1.0 Create by Zhangcheney V1.1 Improve by ZhangbinbingprasoonNo ratings yet
- Aliant Ommunications: DIN Rail VersionDocument2 pagesAliant Ommunications: DIN Rail VersionNguyễn Tuấn ViệtNo ratings yet
- 11 Appendix Troubleshooting FCoEDocument200 pages11 Appendix Troubleshooting FCoESanjeev PatilNo ratings yet
- Internetworking Additional Exercises SolutionsDocument17 pagesInternetworking Additional Exercises SolutionsAnonymous uVZ8dZgNo ratings yet
- LAN Ethernet Maximum Rates, Generation, Capturing & Monitoring - NST WikiDocument37 pagesLAN Ethernet Maximum Rates, Generation, Capturing & Monitoring - NST Wikikank riyanNo ratings yet
- G.SHDSL .Bis Efm TDM DatasheetDocument3 pagesG.SHDSL .Bis Efm TDM DatasheetShreeram RaneNo ratings yet
- Eclipse Short Form Datasheet ETSI 2022 AUG 16Document4 pagesEclipse Short Form Datasheet ETSI 2022 AUG 16Daya CaminoNo ratings yet
- The Industrial EthernetDocument4 pagesThe Industrial EthernetRaul GonzalezNo ratings yet
- LAN: Local Area Network: Reading: 4.3 Computer Networks, TanenbaumDocument52 pagesLAN: Local Area Network: Reading: 4.3 Computer Networks, TanenbaumQuân HtNo ratings yet
- CH 02 - DCC10e-ProtocolOverviewExampleDocument3 pagesCH 02 - DCC10e-ProtocolOverviewExampleHasanNo ratings yet
- Joey StubbsDocument53 pagesJoey StubbsSushil Kumar HansNo ratings yet
- Ceragon - IP-50C Classic - Datasheet - Rev - J.01Document9 pagesCeragon - IP-50C Classic - Datasheet - Rev - J.01daniyartoktarbayevNo ratings yet
- Question Bank: Unit Questions/ Tutorials/Quiz Questions CO MarksDocument2 pagesQuestion Bank: Unit Questions/ Tutorials/Quiz Questions CO MarksMahesh Manikrao KumbharNo ratings yet
- Ceragon IP-50C Datasheet Rev JDocument9 pagesCeragon IP-50C Datasheet Rev JAndrés MónacoNo ratings yet
- Underlying Technology: TCP/IP Protocol SuiteDocument84 pagesUnderlying Technology: TCP/IP Protocol SuiteAsif AfridiNo ratings yet
- 16.1.2 Layers of Networks The Data Across A Network IsDocument6 pages16.1.2 Layers of Networks The Data Across A Network Islm_zakaria4420No ratings yet
- Cisco QuizDocument2 pagesCisco QuizJatinder SinghNo ratings yet
- Gigabit Fiber Ethernets (Optical Ethernet)Document10 pagesGigabit Fiber Ethernets (Optical Ethernet)lakshman kittuNo ratings yet
- Local Area Network TrainerDocument1 pageLocal Area Network TrainerSUDEEP.CNo ratings yet
- Lecture 6Document34 pagesLecture 6Aeman AkramNo ratings yet
- Dhirubhai Ambani Institute of Information & Communication Technology Mid Semester Test-2, 1 Semester 2011-12Document7 pagesDhirubhai Ambani Institute of Information & Communication Technology Mid Semester Test-2, 1 Semester 2011-12Shreya ShahNo ratings yet
- Connection-Oriented Networks: SONET/SDH, ATM, MPLS and Optical NetworksFrom EverandConnection-Oriented Networks: SONET/SDH, ATM, MPLS and Optical NetworksNo ratings yet
- Brandon House CrossbeamDocument55 pagesBrandon House CrossbeamIng. Armando OlveraNo ratings yet
- MPLS Enhancements To Support Layer 2 Transport Services: Leading Edge RoutingDocument21 pagesMPLS Enhancements To Support Layer 2 Transport Services: Leading Edge RoutingIng. Armando OlveraNo ratings yet
- Chapter 15Document29 pagesChapter 15zakiya hassanNo ratings yet
- AFDX Tutorial: Session One: AFDX BackgroundDocument29 pagesAFDX Tutorial: Session One: AFDX BackgroundIng. Armando OlveraNo ratings yet
- Centrecom Micro Transceivers: 10base-2 Mau 10base-2 Mau, Slim-Line 10Base-T Mau 10Base-T Mau 10Base-T Mau, Slim-LineDocument2 pagesCentrecom Micro Transceivers: 10base-2 Mau 10base-2 Mau, Slim-Line 10Base-T Mau 10Base-T Mau 10Base-T Mau, Slim-LineIng. Armando OlveraNo ratings yet
- Carlson Evlbi TCP FundamentalsDocument51 pagesCarlson Evlbi TCP FundamentalsIng. Armando OlveraNo ratings yet
- Patent Issues During IEEE Standards DevelopmentDocument15 pagesPatent Issues During IEEE Standards DevelopmentIng. Armando OlveraNo ratings yet
- 2015 Ethernet Roadmap Panel 03-23-15Document39 pages2015 Ethernet Roadmap Panel 03-23-15Ing. Armando OlveraNo ratings yet
- Ethernet and Fibre Cable: Business Data Communications, 5eDocument39 pagesEthernet and Fibre Cable: Business Data Communications, 5eIng. Armando OlveraNo ratings yet
- 100 Gigabit Ethernet Requirements & ImplementationDocument26 pages100 Gigabit Ethernet Requirements & ImplementationIng. Armando OlveraNo ratings yet
- Junnkeh OsiDocument30 pagesJunnkeh OsiIng. Armando OlveraNo ratings yet
- FERC TC: Information Technology For Reliability & Markets: PTD Energy Management & Information SystemsDocument9 pagesFERC TC: Information Technology For Reliability & Markets: PTD Energy Management & Information SystemsIng. Armando OlveraNo ratings yet
- Link Layer: Link Layer Services Error Detection and Correction Multiple Access ProtocolsDocument40 pagesLink Layer: Link Layer Services Error Detection and Correction Multiple Access ProtocolsIng. Armando OlveraNo ratings yet
- Chapter 2Document34 pagesChapter 2Ing. Armando OlveraNo ratings yet
- Energy Efficient Ethernet (EEE) : Network Standby - TorontoDocument25 pagesEnergy Efficient Ethernet (EEE) : Network Standby - TorontoIng. Armando OlveraNo ratings yet
- Network Protocols: CECS 474 Computer Network InteroperabilityDocument10 pagesNetwork Protocols: CECS 474 Computer Network InteroperabilityIng. Armando OlveraNo ratings yet
- 11 TCP IpDocument18 pages11 TCP IpIng. Armando OlveraNo ratings yet
- TRILL Tutorial: Donald E. Eastlake 3Document128 pagesTRILL Tutorial: Donald E. Eastlake 3Ing. Armando OlveraNo ratings yet
- 10 Gigabit Ethernet Wan Phy and Mac: IEEE 802.3 Nov. 8, 1999Document7 pages10 Gigabit Ethernet Wan Phy and Mac: IEEE 802.3 Nov. 8, 1999Ing. Armando OlveraNo ratings yet
- Ieee802 11Document34 pagesIeee802 11Ing. Armando OlveraNo ratings yet
- Datalink - Ethernet, HomeDocument35 pagesDatalink - Ethernet, HomeIng. Armando OlveraNo ratings yet
- One Controller - Any Bus: Connecting Programmable Automation Controllers, Measurements, Sensors, Networks and PlcsDocument33 pagesOne Controller - Any Bus: Connecting Programmable Automation Controllers, Measurements, Sensors, Networks and PlcsIng. Armando OlveraNo ratings yet
- 10 Gig PMD Technologies: IEEE Plenary Kauai, Hawaii November 1999 Walter ThirionDocument10 pages10 Gig PMD Technologies: IEEE Plenary Kauai, Hawaii November 1999 Walter ThirionIng. Armando OlveraNo ratings yet
- 07 SeattleDocument40 pages07 SeattleIng. Armando OlveraNo ratings yet
- The Data-Link Layer: Ethernet, Arp and Lans: Based On Slides From The Computer NetworkingDocument91 pagesThe Data-Link Layer: Ethernet, Arp and Lans: Based On Slides From The Computer NetworkingIng. Armando OlveraNo ratings yet
- Data Center Networks and Basic Switching Technologies: Hakim WeatherspoonDocument18 pagesData Center Networks and Basic Switching Technologies: Hakim WeatherspoonIng. Armando OlveraNo ratings yet
- 10 Gigabit Ethernet The Market Opportunity: Nan Chen, Nortel Networks, Bruce Tolley, 3com CorpDocument10 pages10 Gigabit Ethernet The Market Opportunity: Nan Chen, Nortel Networks, Bruce Tolley, 3com CorpIng. Armando OlveraNo ratings yet
- 7 Ip MulticastDocument29 pages7 Ip MulticastIng. Armando OlveraNo ratings yet
- 6 OsiDocument25 pages6 OsiIng. Armando OlveraNo ratings yet
- Canto Panw Presentation v4 CleanDocument25 pagesCanto Panw Presentation v4 CleanIng. Armando OlveraNo ratings yet
- SENTRON - Powermanager PDFDocument10 pagesSENTRON - Powermanager PDFMancamiaicuruNo ratings yet
- Product Sheet BS422 Multi-Tech Outdoor Base StationDocument4 pagesProduct Sheet BS422 Multi-Tech Outdoor Base StationmojoNo ratings yet
- D-Link DHP-302 CPL Adapter Worldwide User's GuideDocument22 pagesD-Link DHP-302 CPL Adapter Worldwide User's GuidesmartmeisterNo ratings yet
- Symantec Netbackup 5230 Appliance Promotion BundleDocument1 pageSymantec Netbackup 5230 Appliance Promotion Bundlesaju8No ratings yet
- BT Wholesale Ethernet: What You Need To KnowDocument4 pagesBT Wholesale Ethernet: What You Need To KnowAkshay JayantNo ratings yet
- Um en PC Worx SRT 8681 en 00Document80 pagesUm en PC Worx SRT 8681 en 00Пенови ИнженерингNo ratings yet
- SDN 10-Gigabit L2+ Managed SwitchDocument12 pagesSDN 10-Gigabit L2+ Managed SwitchDaniel Perez OsorioNo ratings yet
- KGL-WIN Ch01 IntroductionDocument7 pagesKGL-WIN Ch01 IntroductionPop ManNo ratings yet
- Mid Term - SolutionDocument8 pagesMid Term - SolutionAleena KanwalNo ratings yet
- Intro 6721Document223 pagesIntro 6721premkumarhydNo ratings yet
- Gs108tv3 Gs110tpv3 DsDocument14 pagesGs108tv3 Gs110tpv3 DsIgor MakarenkoNo ratings yet
- Router Controllers and Panels Features ListDocument7 pagesRouter Controllers and Panels Features ListArdian AriefNo ratings yet
- DNPR Users GuideDocument85 pagesDNPR Users GuidemanitopNo ratings yet
- Operating Manual TR1200IPDocument20 pagesOperating Manual TR1200IPluisNo ratings yet
- CCN StandardDocument66 pagesCCN StandardGabriel LopezNo ratings yet
- Cognex Vision Software: Gige Vision Cameras User'S GuideDocument8 pagesCognex Vision Software: Gige Vision Cameras User'S Guidetan vu duyNo ratings yet
- CA1N9202en 05Document6 pagesCA1N9202en 05osto72100% (1)
- 7750 SR Part Number Listing PDFDocument23 pages7750 SR Part Number Listing PDFyudhien4443No ratings yet
- Fengine S5800 Switch Datasheet-V30R203Document5 pagesFengine S5800 Switch Datasheet-V30R203Aganinggar EdoNo ratings yet
- Ex8208 Ethernet SwitchDocument11 pagesEx8208 Ethernet SwitchRifa YanuarNo ratings yet
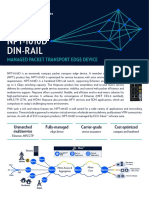
- Neptune NPT-1010D Din-Rail: Managed Packet Transport Edge DeviceDocument2 pagesNeptune NPT-1010D Din-Rail: Managed Packet Transport Edge DevicesantiagobermeoNo ratings yet
- OTN N50 N70 Flexible Ethernet TransportDocument8 pagesOTN N50 N70 Flexible Ethernet TransportkouroshNo ratings yet
- 090.560-CS Quantum LX Condenser-Vessel 3.0x 2011-08Document92 pages090.560-CS Quantum LX Condenser-Vessel 3.0x 2011-08Franz CorasNo ratings yet
- H3C S3100-SI Series Intelligent Access Switches: Product Overview Features and BenefitsDocument6 pagesH3C S3100-SI Series Intelligent Access Switches: Product Overview Features and BenefitsFernan Esco GuerNo ratings yet
- NR Electric Automation CatalogDocument34 pagesNR Electric Automation CatalogmahnoorNo ratings yet
- Nortel Networks - Next-Generation SONET-SDH Networking TechnologiesDocument11 pagesNortel Networks - Next-Generation SONET-SDH Networking TechnologiesAlberto José Escalona PiñeroNo ratings yet
- Adin2111 2891062Document126 pagesAdin2111 2891062Renzo Grover Fabian EspinozaNo ratings yet
- Cisco Asa 5515-X Firewall Edition ASA5515K9Document80 pagesCisco Asa 5515-X Firewall Edition ASA5515K9Rogerio SantosNo ratings yet
- Grupo 2.1-002Document6 pagesGrupo 2.1-002Anonymous vUzAkDZNo ratings yet
- Zyxel P 660HW T1 v3 - 2Document10 pagesZyxel P 660HW T1 v3 - 2deathesNo ratings yet