You might also like
- Weightlessness: Circular and Satellite Motion NameDocument2 pagesWeightlessness: Circular and Satellite Motion NameAnthony QuanNo ratings yet
- Lecture 4Document14 pagesLecture 4Yash RajNo ratings yet
- Cylindrical Polar Coordinate System: Welcome To The 3D World!Document24 pagesCylindrical Polar Coordinate System: Welcome To The 3D World!pranavNo ratings yet
- MECH4450 Introduction To Finite Element MethodsDocument21 pagesMECH4450 Introduction To Finite Element MethodsAnimesh Kumar JhaNo ratings yet
- Chapter 1 - Vector AnalysisDocument27 pagesChapter 1 - Vector AnalysismayankardeshanaNo ratings yet
- Lecture 02b 26092023 032729pmDocument6 pagesLecture 02b 26092023 032729pmvacedok521No ratings yet
- Finite Element Method For Structural Dynamic and Stability AnalysesDocument46 pagesFinite Element Method For Structural Dynamic and Stability AnalysesabimalainNo ratings yet
- Axis SymetricDocument44 pagesAxis SymetricAnand RajNo ratings yet
- BS-VII MSc-IIIDocument64 pagesBS-VII MSc-IIIwajeehawisalNo ratings yet
- MECH4450 Introduction To Finite Element MethodsDocument21 pagesMECH4450 Introduction To Finite Element MethodsAnimesh Kumar JhaNo ratings yet
- Prof. Jaime Alberto Escobar G. Faculty of EngineeringDocument14 pagesProf. Jaime Alberto Escobar G. Faculty of EngineeringSofia OrjuelaNo ratings yet
- 2.1 Complex Maths and Laplace Transform ReviewDocument31 pages2.1 Complex Maths and Laplace Transform ReviewDawa PenjorNo ratings yet
- Electronic Configuration.Document12 pagesElectronic Configuration.spidy warriorsNo ratings yet
- 6-Dynamics - Notes - Curvilinear Motion (Polar) - 2019 - AB - HFDocument16 pages6-Dynamics - Notes - Curvilinear Motion (Polar) - 2019 - AB - HFAyesha Maher khanNo ratings yet
- Cylindrical Coordinate System FDocument14 pagesCylindrical Coordinate System FRajeshNo ratings yet
- Notes 16Document14 pagesNotes 16sanyam KanungaNo ratings yet
- One-Dimensional Continuous GroupsDocument22 pagesOne-Dimensional Continuous GroupssunsukurianNo ratings yet
- 316chem Chap 4Document62 pages316chem Chap 4jumana sayedNo ratings yet
- Gamma FunctionDocument20 pagesGamma FunctionPerum RajabasaNo ratings yet
- CoordinatesDocument4 pagesCoordinatesyeghna_hager100% (2)
- Cartesian, Cylindrical Polar, and Spherical Polar CoordinatesDocument2 pagesCartesian, Cylindrical Polar, and Spherical Polar Coordinatesjgra42No ratings yet
- 4.1 Thick Cylinder and DisksDocument7 pages4.1 Thick Cylinder and DisksMohamad Amir HaziqNo ratings yet
- Direction Cosines and Direction Ratios - YT - DoneDocument17 pagesDirection Cosines and Direction Ratios - YT - DoneSristi RajNo ratings yet
- Direction Cosines and Direction Ratios - YT - DoneDocument17 pagesDirection Cosines and Direction Ratios - YT - DoneSristi RajNo ratings yet
- Notes 14 6382 Gamma FunctionDocument20 pagesNotes 14 6382 Gamma FunctionbomidiyashwanthkumarNo ratings yet
- Chapter 4Document39 pagesChapter 4pcbmengNo ratings yet
- Complex NumberDocument28 pagesComplex NumberKB SCOUTSNo ratings yet
- Chap1 Đã G PDocument52 pagesChap1 Đã G PTran LamNo ratings yet
- Bab 5: Pendahuluan Analisa Differential Pada Gerakan Fluida 5.1. Konservasi MasaDocument43 pagesBab 5: Pendahuluan Analisa Differential Pada Gerakan Fluida 5.1. Konservasi MasaRindra HosanovaNo ratings yet
- Spherical Polar Coordinate SystemDocument3 pagesSpherical Polar Coordinate SystemPavithra SridharNo ratings yet
- Lecture Notes 2 - Useful Relations Cartesian, Cylindrical and Spherical CoordinatesDocument5 pagesLecture Notes 2 - Useful Relations Cartesian, Cylindrical and Spherical CoordinatesKatherina PetersenNo ratings yet
- Schuh17a Supp PDFDocument28 pagesSchuh17a Supp PDFRahul BamaniaNo ratings yet
- Elastoplastic BehaviourDocument8 pagesElastoplastic BehaviourHalef Michel Bou KarimNo ratings yet
- Chapter 2.2Document52 pagesChapter 2.2nitingautam1907No ratings yet
- PDF 5Document8 pagesPDF 5Anthony Saracasmo GerdesNo ratings yet
- 3 D Box 1Document11 pages3 D Box 1Kamalesh KolandasamyNo ratings yet
- Eng Analysis ComplexDocument46 pagesEng Analysis Complexlaptopsteve324No ratings yet
- Rigid RotorDocument38 pagesRigid RotorSergeyNo ratings yet
- Lecture 09 PDFDocument25 pagesLecture 09 PDFRachit ShahNo ratings yet
- Lecture 5: The Electric Potential and The Method of ImagesDocument12 pagesLecture 5: The Electric Potential and The Method of Imagessamer saeedNo ratings yet
- Chapter 2-2Document60 pagesChapter 2-2sakshi.shahani02No ratings yet
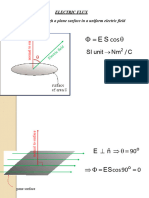
- ELECTRIC FLUX 1 Chapter1 04Document57 pagesELECTRIC FLUX 1 Chapter1 04Shubham TiwariNo ratings yet
- Interference Of Light: S. S. Lin (林賢碩) Wayne (王韋恩)Document35 pagesInterference Of Light: S. S. Lin (林賢碩) Wayne (王韋恩)王韋恩No ratings yet
- The Complex Plane Demoivre'S TheoremDocument16 pagesThe Complex Plane Demoivre'S TheoremTouseef IsmailNo ratings yet
- Solution of Homework #3Document6 pagesSolution of Homework #3丁偉庭No ratings yet
- 2022 Atomic Structure G3 FACEDocument3 pages2022 Atomic Structure G3 FACEo3gce8e2lfNo ratings yet
- MSO202 Lect 4Document18 pagesMSO202 Lect 4ab4azizNo ratings yet
- The Problems Marked (T) Need An Explicit Discussion in The Tutorial Class. Other Problems Are For Enhanced Practice. 1. (A) ZZDZDocument6 pagesThe Problems Marked (T) Need An Explicit Discussion in The Tutorial Class. Other Problems Are For Enhanced Practice. 1. (A) ZZDZAditiNo ratings yet
- Velocity VectorsDocument1 pageVelocity VectorsTim SummersNo ratings yet
- Texmf TeXFiles Phys5403 HartFock - DviDocument3 pagesTexmf TeXFiles Phys5403 HartFock - DvifairoosiitbNo ratings yet
- Nikola 1Document11 pagesNikola 1Nikola JankovicNo ratings yet
- Frame Analysis Byfinite Element Method: Finite Element Method by G. R. Liu and S. S. QuekDocument29 pagesFrame Analysis Byfinite Element Method: Finite Element Method by G. R. Liu and S. S. QuekananiaNo ratings yet
- Digital Signal Processing: Properties of The Z-TransformDocument13 pagesDigital Signal Processing: Properties of The Z-TransformJulie ThorNo ratings yet
- MATH230 Lecture Notes 3Document45 pagesMATH230 Lecture Notes 3abc defNo ratings yet
- Assignment II Apllied Math IIIDocument2 pagesAssignment II Apllied Math IIISuleiman AhmedNo ratings yet
- Rigid RotorDocument38 pagesRigid RotorRaniaNo ratings yet
- مادة التحليلات الهندسيهDocument61 pagesمادة التحليلات الهندسيهحسن صالح حسن المياحيNo ratings yet
- Formula RioDocument1 pageFormula Riomonica espinosaNo ratings yet
- Gce As/A Level Mathematics Gce As/A Level Further MathematicsDocument11 pagesGce As/A Level Mathematics Gce As/A Level Further MathematicsUsmaan ZaidiNo ratings yet
- Transport Phenomena - 2-3 - Vector and Tensor 2 and CoordinatesDocument22 pagesTransport Phenomena - 2-3 - Vector and Tensor 2 and CoordinatesHareritamNo ratings yet
- Lecture Euler EquationDocument33 pagesLecture Euler EquationYash RajNo ratings yet
- Lectur 10 UploadDocument13 pagesLectur 10 UploadYash RajNo ratings yet
- Lec 31 32Document58 pagesLec 31 32Yash RajNo ratings yet
- List of College (MNSSBY)Document330 pagesList of College (MNSSBY)Yash RajNo ratings yet
- List of Engineering - UpdatedDocument156 pagesList of Engineering - UpdatedYash RajNo ratings yet
- Lec 30Document19 pagesLec 30Yash RajNo ratings yet
- List of College (MNSSBY)Document20 pagesList of College (MNSSBY)Yash RajNo ratings yet
- Medical and Dental Colleges PH No. and e Mail Id ListDocument5 pagesMedical and Dental Colleges PH No. and e Mail Id ListYash RajNo ratings yet
- Chapter 7 ExergyDocument15 pagesChapter 7 ExergyBTS BURN THEIR TRASH TOO HARDNo ratings yet
- Chapter 27: Large Sliding Analysis of A BuckleDocument12 pagesChapter 27: Large Sliding Analysis of A BuckleDan WolfNo ratings yet
- Some Natural Phenomena Class 8 Notes Science Chapter 15Document3 pagesSome Natural Phenomena Class 8 Notes Science Chapter 15zodika khiangteNo ratings yet
- ENGR-1100 Introduction To Engineering AnalysisDocument18 pagesENGR-1100 Introduction To Engineering AnalysisAsheesh KumarNo ratings yet
- Cambridge International AS & A Level Physics 9702: Scheme of WorkDocument187 pagesCambridge International AS & A Level Physics 9702: Scheme of WorkRichie TangNo ratings yet
- Different Thermodynamic Process and 1 Law Application in It: - V) NR (T - T) (T - T)Document5 pagesDifferent Thermodynamic Process and 1 Law Application in It: - V) NR (T - T) (T - T)priyam dasNo ratings yet
- Astm D 2161 PDFDocument25 pagesAstm D 2161 PDFalbert_ben1380% (5)
- Upwork (ODesk) Test Answers - Mechanical Engineering Test 2015 - MiscellaneoDocument18 pagesUpwork (ODesk) Test Answers - Mechanical Engineering Test 2015 - MiscellaneoAnonymous LpCD3hNo ratings yet
- ch05 Forces in Beams and CablesDocument71 pagesch05 Forces in Beams and CablesOnline Review SpecialistsNo ratings yet
- Maxwell's Equations - Simple English Wikipedia, The Free EncyclopediaDocument6 pagesMaxwell's Equations - Simple English Wikipedia, The Free EncyclopediaBruinNo ratings yet
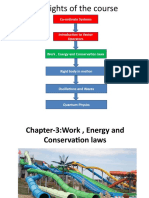
- JEE Main Work, Energy and Power Revision Notes - Free PDF DownloadDocument5 pagesJEE Main Work, Energy and Power Revision Notes - Free PDF DownloadSancia SamNo ratings yet
- Elasticity and Hooke's LawDocument26 pagesElasticity and Hooke's LawSinaga PhilipNo ratings yet
- AS-022 Computing A Compliance Matrix Using Utility Subroutine GTCMATDocument7 pagesAS-022 Computing A Compliance Matrix Using Utility Subroutine GTCMATBas RamuNo ratings yet
- Pressure CoefficinetDocument2 pagesPressure Coefficinetsahood saleemNo ratings yet
- Principles of Convective Heat Transfer PDFDocument722 pagesPrinciples of Convective Heat Transfer PDFBruno de Rosso100% (3)
- Capabilities Chart: A Comprehensive Checklist of ANSYS Workbench CapabilitiesDocument8 pagesCapabilities Chart: A Comprehensive Checklist of ANSYS Workbench CapabilitiesNguyen Huu ThangNo ratings yet
- Agten 2012Document187 pagesAgten 2012Juan Sebastian Camero CartagenaNo ratings yet
- ATMS 305 - Atmospheric Thermodynamics and Statics: - Today's Lecture ObjectivesDocument24 pagesATMS 305 - Atmospheric Thermodynamics and Statics: - Today's Lecture ObjectivesRaul Real GonzalezNo ratings yet
- Gandhinagar Institute of Technology: Topic: Effect of Gyroscopic Couple On An Aero-PlaneDocument14 pagesGandhinagar Institute of Technology: Topic: Effect of Gyroscopic Couple On An Aero-Planehorizon designsNo ratings yet
- CelerityDocument23 pagesCelerityswabrightNo ratings yet
- Darcy Friction Loss Calculator For Pipes, Fittings & Valves: Given DataDocument2 pagesDarcy Friction Loss Calculator For Pipes, Fittings & Valves: Given DataMSNo ratings yet
- Golf StudyDocument25 pagesGolf StudyMary GinetaNo ratings yet
- Topic 3Document181 pagesTopic 3C KNo ratings yet
- Micrornechanics of Defects SolidsDocument506 pagesMicrornechanics of Defects SolidsCarlos RomeroNo ratings yet
- A Cyclic Shear-Volume Coupling and Pore Pressure Model For SandDocument10 pagesA Cyclic Shear-Volume Coupling and Pore Pressure Model For SandAlejandro Gancedo ToralNo ratings yet
- Moon AnniversaryDocument50 pagesMoon AnniversaryILIAS AICHNo ratings yet
- Mastery Answers - Mechanics PDFDocument10 pagesMastery Answers - Mechanics PDFAlfred Jijo (TepidPigeon2272)No ratings yet
- Beamer Latex PresentationDocument48 pagesBeamer Latex Presentationmanu2958No ratings yet
- 1 Maxwell's Equations in Matter (Integrate With Next Section)Document2 pages1 Maxwell's Equations in Matter (Integrate With Next Section)iordacheNo ratings yet