You might also like
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesFrom EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesRating: 4.5 out of 5 stars4.5/5 (7)
- PreviewDocument10 pagesPreview최재호No ratings yet
- Practical Work 4 - CMOS + Rubrics PDFDocument23 pagesPractical Work 4 - CMOS + Rubrics PDFRiki SmithNo ratings yet
- The Georgian Technical University The Department of Electrical Engineering and Electronics Simon NemsadzeDocument231 pagesThe Georgian Technical University The Department of Electrical Engineering and Electronics Simon Nemsadzepeter vanderNo ratings yet
- Active and Reactive PowerDocument19 pagesActive and Reactive PowerGairik Chakraborty100% (2)
- LPR Corrosion Monitoring PDFDocument2 pagesLPR Corrosion Monitoring PDFHimanshu SharmaNo ratings yet
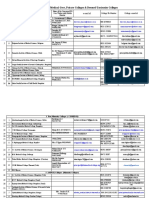
- Medical and Dental Colleges PH No. and e Mail Id ListDocument5 pagesMedical and Dental Colleges PH No. and e Mail Id ListYash RajNo ratings yet
- Solution InverterDocument12 pagesSolution Inverterxuanbac1984No ratings yet
- List of Engineering - UpdatedDocument156 pagesList of Engineering - UpdatedYash RajNo ratings yet
- Forced Harmonic OscillatorDocument2 pagesForced Harmonic OscillatoralayuNo ratings yet
- Foaie de Formule Seminar DOE PDFDocument1 pageFoaie de Formule Seminar DOE PDFJon JonNo ratings yet
- Physics Advanced Level Problem Solving (ALPS-3) - SolutionDocument12 pagesPhysics Advanced Level Problem Solving (ALPS-3) - SolutionRachit JainNo ratings yet
- Formular 154Document1 pageFormular 154พิมพ์ โพธิสัตว์No ratings yet
- Vibration and Noise 354: Harmonic Response of Damped and Undamped Systems 1&2 August 2016Document5 pagesVibration and Noise 354: Harmonic Response of Damped and Undamped Systems 1&2 August 2016Morena MoremoholoNo ratings yet
- Lecture 5 - Dielectric in Alternating Field - PH611Document17 pagesLecture 5 - Dielectric in Alternating Field - PH611vinitarohitNo ratings yet
- 2023-JEE Advanced-4-PAPER-2 - Solutions (Gen 1 To 6)Document15 pages2023-JEE Advanced-4-PAPER-2 - Solutions (Gen 1 To 6)VengeuinakNo ratings yet
- KGH Xs GH KGH CE GH KGH: Mech / Elec Analogy Nyquist Criteria State - SpaceDocument1 pageKGH Xs GH KGH CE GH KGH: Mech / Elec Analogy Nyquist Criteria State - Spacejohn dongNo ratings yet
- Aits-1920-Ot-Jeem - SolDocument12 pagesAits-1920-Ot-Jeem - SolZomatoswiggy100% (1)
- 4.damped SHMDocument11 pages4.damped SHMgusvani aulia putriNo ratings yet
- L09 - 1DOF Forced Vibration - Isolation - AppendixDocument1 pageL09 - 1DOF Forced Vibration - Isolation - AppendixMogaNo ratings yet
- Fiitjee All India Test Series: JEE (Main) - 2020Document14 pagesFiitjee All India Test Series: JEE (Main) - 2020mbsureshNo ratings yet
- Aits-1920-Ot-Jeem - Sol PDFDocument12 pagesAits-1920-Ot-Jeem - Sol PDFsoumadip senNo ratings yet
- Chapt 4 French DB 2019 PDFDocument34 pagesChapt 4 French DB 2019 PDFAman BhatiaNo ratings yet
- TransientDocument27 pagesTransientirmayantiNo ratings yet
- P2213 Final S23 Formula SheetDocument3 pagesP2213 Final S23 Formula Sheethi hiNo ratings yet
- FormulaeDocument1 pageFormulaeAna Paula BittencourtNo ratings yet
- Formulario 1° ParcialDocument1 pageFormulario 1° ParcialFernandaNo ratings yet
- Aits 1920 Open Test 2jeea Paper 1 SolDocument15 pagesAits 1920 Open Test 2jeea Paper 1 Solmani sarthakNo ratings yet
- Magnetic Effect of Current - Level - 2 - DTS 2 - Solution PDFDocument2 pagesMagnetic Effect of Current - Level - 2 - DTS 2 - Solution PDFbrainx MagicNo ratings yet
- ELECTROMAGNETIC INDUCTION-03-Subjection SolvedDocument14 pagesELECTROMAGNETIC INDUCTION-03-Subjection SolvedRaju SinghNo ratings yet
- AITS-2021-OPEN TEST-II-JEEA-PAPER-1-SolDocument15 pagesAITS-2021-OPEN TEST-II-JEEA-PAPER-1-SolTimmy LNo ratings yet
- Digital Image Processing: Lect #12Document35 pagesDigital Image Processing: Lect #12nnehasinghNo ratings yet
- Chapter 5 French DB Short Questions PDFDocument7 pagesChapter 5 French DB Short Questions PDFAman BhatiaNo ratings yet
- SPH3U Formula Sheet Fall 2020 1 PDFDocument2 pagesSPH3U Formula Sheet Fall 2020 1 PDFUzmaNo ratings yet
- Alternating Current-09 - SolutionDocument16 pagesAlternating Current-09 - SolutionRaju SinghNo ratings yet
- USNA Acoustics Notes - Chapter 1aDocument17 pagesUSNA Acoustics Notes - Chapter 1aNvlArchNo ratings yet
- SHM Solutios Final - 1188837 - 2023 - 03 - 19 - 23 - 33Document12 pagesSHM Solutios Final - 1188837 - 2023 - 03 - 19 - 23 - 33AniketNo ratings yet
- ME302 - Final Exam Formula SheetDocument2 pagesME302 - Final Exam Formula SheetAnil YildizNo ratings yet
- Physics Advanced Level Problem Solving (ALPS-9) - SolutionDocument12 pagesPhysics Advanced Level Problem Solving (ALPS-9) - SolutionVedant TodiNo ratings yet
- 8 MicrostripsDocument6 pages8 MicrostripsBasheer Najem aldeenNo ratings yet
- 5.solutions ElectrostaticsDocument14 pages5.solutions Electrostaticshabtamudagim886No ratings yet
- Assignment-12 Solution LandeauDocument5 pagesAssignment-12 Solution LandeauRunjhun MittalNo ratings yet
- Inverted PendulumDocument28 pagesInverted Pendulumlaluseban100% (1)
- Physics Advanced Level Problem Solving (ALPS-1) - SolutionDocument16 pagesPhysics Advanced Level Problem Solving (ALPS-1) - SolutionIshan AgnohotriNo ratings yet
- Lecture 2bDocument12 pagesLecture 2bYusuf GulNo ratings yet
- InClass - 8 Solutions PDFDocument3 pagesInClass - 8 Solutions PDFHarry TouloukianNo ratings yet
- Basis Functions (3 Lectures) : Concept of Basis Functions. Fourier Transform and Its PropertiesDocument16 pagesBasis Functions (3 Lectures) : Concept of Basis Functions. Fourier Transform and Its PropertiesSatya NarayanaNo ratings yet
- Part - I (Physics) : MGH I MV I MVDocument10 pagesPart - I (Physics) : MGH I MV I MVpankajNo ratings yet
- Automatic Control CH2Document52 pagesAutomatic Control CH2廖偉丞No ratings yet
- Chapter 8. The Steady Magnetic Field: 1. Biot-Savart LawDocument54 pagesChapter 8. The Steady Magnetic Field: 1. Biot-Savart LawkailasNo ratings yet
- All Document Reader 1710418124781Document17 pagesAll Document Reader 1710418124781fnyirenda28No ratings yet
- 2020 MAT21A MAT216A WIS32AI Test2 PaperDocument3 pages2020 MAT21A MAT216A WIS32AI Test2 PaperKgotso KgengweNo ratings yet
- MCT 3Document25 pagesMCT 3Chirayu SharmaNo ratings yet
- Quarterwave MonopleDocument10 pagesQuarterwave Monoplebchaitanya55No ratings yet
- Lecture - 3 Diode RectifiersDocument40 pagesLecture - 3 Diode RectifiersFaheem SiddiqueNo ratings yet
- NEET UG Physics Rotational-MotionDocument146 pagesNEET UG Physics Rotational-Motionbatulchunawala10No ratings yet
- Second Order Circuits PDFDocument25 pagesSecond Order Circuits PDFShreshth SrivastavaNo ratings yet
- Physics Formula SheetDocument1 pagePhysics Formula SheetWaceed HowNo ratings yet
- Fourier Series: Faculty of Electrical and Electronics EngineeringDocument60 pagesFourier Series: Faculty of Electrical and Electronics EngineeringDuc Anh NguyễnNo ratings yet
- Problem29 65Document1 pageProblem29 65IENCSNo ratings yet
- Fiitjee All India Integrated Test Series: JEE (Main) - 2020 Answers, Hints & SolutionsDocument20 pagesFiitjee All India Integrated Test Series: JEE (Main) - 2020 Answers, Hints & SolutionsKaranNo ratings yet
- WG28 Butterworth R2Document8 pagesWG28 Butterworth R2Josef TurekNo ratings yet
- Homework 3 SolutionsDocument9 pagesHomework 3 SolutionsAkshay KumarNo ratings yet
- ODE Lecture Notes Section 3.8 1 of 14Document14 pagesODE Lecture Notes Section 3.8 1 of 14Pritib KumarNo ratings yet
- Chapter 4 AC To AC Converters: OutlineDocument25 pagesChapter 4 AC To AC Converters: OutlineKushaldinho DattaNo ratings yet
- Lecture 5Document21 pagesLecture 5Yash RajNo ratings yet
- Lecture Euler EquationDocument33 pagesLecture Euler EquationYash RajNo ratings yet
- Lecture 4Document14 pagesLecture 4Yash RajNo ratings yet
- Lectur 10 UploadDocument13 pagesLectur 10 UploadYash RajNo ratings yet
- Lec 31 32Document58 pagesLec 31 32Yash RajNo ratings yet
- List of College (MNSSBY)Document330 pagesList of College (MNSSBY)Yash RajNo ratings yet
- List of College (MNSSBY)Document20 pagesList of College (MNSSBY)Yash RajNo ratings yet
- Modulo de Control Motor Perkins Vantage-500Document100 pagesModulo de Control Motor Perkins Vantage-500Jhonatan SernaNo ratings yet
- Battery Recycling Datasheet: AccurecDocument1 pageBattery Recycling Datasheet: AccurecMacarena DiazNo ratings yet
- Chapter 1: Introduction To Communication Systems: Multiple ChoiceDocument11 pagesChapter 1: Introduction To Communication Systems: Multiple ChoiceReivenNo ratings yet
- Datasheet: Multi-Mode Multi-Key Multi-Function SeriesDocument13 pagesDatasheet: Multi-Mode Multi-Key Multi-Function SeriesFreddy ArmstrongNo ratings yet
- Blue Eyes Technology: Presented by Shalini Gupta B.tech CSE 3rd YearDocument26 pagesBlue Eyes Technology: Presented by Shalini Gupta B.tech CSE 3rd YearShalini Gupta100% (1)
- CCR204 - Lec05Document47 pagesCCR204 - Lec05Moni SharmaNo ratings yet
- Behringer B1200DPRO Powered (Active) PA Subwoofer Owners Users ManualDocument4 pagesBehringer B1200DPRO Powered (Active) PA Subwoofer Owners Users ManualSteveNo ratings yet
- MCQ On Analog CommunicationDocument6 pagesMCQ On Analog CommunicationTAñujNo ratings yet
- 9898 - Immersion Temperature Sensor FT-TP - 100 FT-TP - 400 - enDocument4 pages9898 - Immersion Temperature Sensor FT-TP - 100 FT-TP - 400 - enurangtengakNo ratings yet
- Hfe Sphinx Project Two Mk2 Service enDocument32 pagesHfe Sphinx Project Two Mk2 Service entekassala matondo PitchuNo ratings yet
- M2aa 8Document2 pagesM2aa 8RAJA TNo ratings yet
- Allisonmammophysics 2018Document45 pagesAllisonmammophysics 2018micozaaaNo ratings yet
- BVP183 Led 140Document8 pagesBVP183 Led 140MANDAR LITESNo ratings yet
- DDF 195Document6 pagesDDF 195Teguh RumiyartoNo ratings yet
- Logic Circuits & Switching Theory I: Quiz No.3 SET CDocument9 pagesLogic Circuits & Switching Theory I: Quiz No.3 SET CRussell ViadoNo ratings yet
- Lahore Converter Station Operation Regulations Volume 1 (Equipment Overview) .Zh-CN.en (1) -拉合尔换流站运行规程第1分册(设备概况).Zh-CN.enDocument185 pagesLahore Converter Station Operation Regulations Volume 1 (Equipment Overview) .Zh-CN.en (1) -拉合尔换流站运行规程第1分册(设备概况).Zh-CN.enUsama ZafarNo ratings yet
- DSP Graphic Voltage Controller (GVC) Retrofit Installation and Startup GuideDocument9 pagesDSP Graphic Voltage Controller (GVC) Retrofit Installation and Startup GuideJoselito FradeNo ratings yet
- TDA8356Document8 pagesTDA8356balvercNo ratings yet
- Mx4Sio: English ManualDocument9 pagesMx4Sio: English ManualAntonio Juan AntonioNo ratings yet
- DSE157 Installation InstructionsDocument1 pageDSE157 Installation Instructionsaling alingNo ratings yet
- Vita - Vacumat 100: Operating ManualDocument13 pagesVita - Vacumat 100: Operating ManualBeli VukNo ratings yet
- G&W - Outdoor Termination KitDocument4 pagesG&W - Outdoor Termination Kitchock channel 19No ratings yet
- Diagnostics 920 DW PDFDocument15 pagesDiagnostics 920 DW PDFColin JaggardNo ratings yet
- PDFenDocument77 pagesPDFenAravindan Ganapathi subramanianNo ratings yet
- Tanyaradzwa Mare Research Project Chapter1-5 2023Document14 pagesTanyaradzwa Mare Research Project Chapter1-5 2023tapiwamuchenje123No ratings yet