You might also like
- Types of Motors Used in RoboticsDocument24 pagesTypes of Motors Used in RoboticsNehul PatilNo ratings yet
- Term Paper On DC MotorDocument4 pagesTerm Paper On DC Motorc5qfb5v5100% (1)
- Robotic Trolley DesignDocument46 pagesRobotic Trolley DesignSaggy ChhataniNo ratings yet
- A Quick Overview On Rotatory Brush and Brushless DC MotorsDocument4 pagesA Quick Overview On Rotatory Brush and Brushless DC Motorsmazza234No ratings yet
- A.C MotorsDocument14 pagesA.C MotorsAsheesh GawdeNo ratings yet
- Term Paper: Subject: Ele 102Document20 pagesTerm Paper: Subject: Ele 102Rajesh VermaNo ratings yet
- Buyers Guide To Electronic MotorsDocument4 pagesBuyers Guide To Electronic MotorsJuci frootNo ratings yet
- Complete Motor Guide For RoboticsDocument50 pagesComplete Motor Guide For RoboticsAngie100% (2)
- Manufacturing of InsulationDocument9 pagesManufacturing of InsulationPrashant PuriNo ratings yet
- Manufacturing A.C Motors: Profile No.: 266 NIC Code: 28192Document14 pagesManufacturing A.C Motors: Profile No.: 266 NIC Code: 28192124swadeshiNo ratings yet
- Electric MotorsDocument13 pagesElectric MotorsCholan PillaiNo ratings yet
- Electric Motors Reference GuideDocument166 pagesElectric Motors Reference GuideYashveer100% (2)
- Electric Motors Reference GuideDocument166 pagesElectric Motors Reference GuideHemendra Jani100% (1)
- Thesis On Speed Control of Induction MotorDocument4 pagesThesis On Speed Control of Induction Motorbk1hxs86100% (2)
- Final - Electronics10 - q4 - Mod3 - Principle Operation of A Robotic Motor 1 - May 8 122023Document22 pagesFinal - Electronics10 - q4 - Mod3 - Principle Operation of A Robotic Motor 1 - May 8 122023Sharina SilvaNo ratings yet
- Speed Torque Characteristics of BLDC Motor With Load VariationsDocument4 pagesSpeed Torque Characteristics of BLDC Motor With Load VariationsEditor IJTSRDNo ratings yet
- Assessment of BLDC Motor For EV Application Considering Vehicle Design StrategyDocument7 pagesAssessment of BLDC Motor For EV Application Considering Vehicle Design StrategyPremier PublishersNo ratings yet
- Electric Motors of Use As Given at The W PDFDocument399 pagesElectric Motors of Use As Given at The W PDFjimNo ratings yet
- Understanding Servo Motors and Their ApplicationsDocument14 pagesUnderstanding Servo Motors and Their ApplicationselecenggNo ratings yet
- Synopsis BLDCDocument3 pagesSynopsis BLDCPawan_Kushwaha_6648No ratings yet
- Overview of Speed Control of A DC Motor Using AndroidDocument41 pagesOverview of Speed Control of A DC Motor Using Androidmunzali surajoNo ratings yet
- Understanding Servo MotorsDocument6 pagesUnderstanding Servo MotorsRathan Kumar SMNo ratings yet
- Training 12 Aerospace ApplicDocument6 pagesTraining 12 Aerospace ApplicvishiwizardNo ratings yet
- Brushed DC MotorDocument6 pagesBrushed DC MotorPrakhar AgrawalNo ratings yet
- Speed Control of Stepper MotorDocument63 pagesSpeed Control of Stepper MotorMohammad Ismail Hossain (Sujohn)100% (4)
- AC vs DC Motor Components and DifferencesDocument13 pagesAC vs DC Motor Components and DifferencesrikechNo ratings yet
- Direct Current (DC) Motors: OperationDocument6 pagesDirect Current (DC) Motors: OperationckyprianouNo ratings yet
- ست خطوات العاكس لقيادة المحرك التعريفي ثلاث مراحلDocument113 pagesست خطوات العاكس لقيادة المحرك التعريفي ثلاث مراحلMOUHSSINE BEN HAMMOUNo ratings yet
- DC @ AC Machines: Construction, Control, and ApplicationsDocument4 pagesDC @ AC Machines: Construction, Control, and ApplicationsMeg CastleNo ratings yet
- Using The Right Motor For Your ProjectDocument3 pagesUsing The Right Motor For Your ProjectKULDEEP THAKURNo ratings yet
- DC Motor Control Techniques and Speed Control MethodsDocument39 pagesDC Motor Control Techniques and Speed Control Methodsnarendramaharana39No ratings yet
- A Review On Control Techniques For Brushless DC (BLDC) MotorsDocument15 pagesA Review On Control Techniques For Brushless DC (BLDC) MotorsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Utilization of Electrical Energy (1-100) 11Document100 pagesUtilization of Electrical Energy (1-100) 11Gopala Krishna YadavNo ratings yet
- Acknowledgment: Ranjeetkumar Singh For TheirDocument49 pagesAcknowledgment: Ranjeetkumar Singh For Theirsavani24No ratings yet
- A Project Report On: M. S. B. T. E. (Mumbai)Document42 pagesA Project Report On: M. S. B. T. E. (Mumbai)YogeshNo ratings yet
- ELX-321-MODULE-2-Drive System and End Effector (1)Document14 pagesELX-321-MODULE-2-Drive System and End Effector (1)Ervert SoteraniaNo ratings yet
- Research Paper On DC MachinesDocument5 pagesResearch Paper On DC Machinesfyr5efrr100% (1)
- Brushless DC Motor-Stepper Motor-ServomotorDocument5 pagesBrushless DC Motor-Stepper Motor-ServomotorMohd Faisal JalilNo ratings yet
- Mini Hack Saw MachineDocument50 pagesMini Hack Saw Machine19k-0374 V.MayliyaNo ratings yet
- Term Paper DC MotorsDocument14 pagesTerm Paper DC MotorsVivekPrakash100% (1)
- Motors Motor SelectionDocument166 pagesMotors Motor SelectionAragaw MuluNo ratings yet
- Automatic Paint Spray RobotDocument3 pagesAutomatic Paint Spray RobotSANAPA TEJASWININo ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Brushless DC Electric MotorDocument8 pagesBrushless DC Electric MotorankitNo ratings yet
- Design Implementation of Light Following RobotDocument25 pagesDesign Implementation of Light Following RobotABHAY KUMARNo ratings yet
- Task 4Document33 pagesTask 4Vishnu SasidharanNo ratings yet
- RoboticsDocument14 pagesRoboticsmstsalmaidrisNo ratings yet
- DC MotorsDocument12 pagesDC MotorsJamie Ray DalisayNo ratings yet
- Project AEDDocument31 pagesProject AEDHuy HoàngNo ratings yet
- Project Report On Robotic ArmDocument28 pagesProject Report On Robotic Armpatel ketan84% (25)
- Chapter-2 Principle-Operation-Applications of Different Stepper Motors and Significance of Permanent Magnet Hybrid Stepper MotorDocument14 pagesChapter-2 Principle-Operation-Applications of Different Stepper Motors and Significance of Permanent Magnet Hybrid Stepper MotorPriya PerumalNo ratings yet
- Denso Report FileDocument32 pagesDenso Report FileRahul Pandey75% (4)
- Projectreportmain PDFDocument36 pagesProjectreportmain PDFAnshul TailorNo ratings yet
- Electric Machines: EE-151 Electrical EngineeringDocument21 pagesElectric Machines: EE-151 Electrical EngineeringZeeshan ShakoorNo ratings yet
- DC Motors and Stepper Motors PDFDocument8 pagesDC Motors and Stepper Motors PDFFrank AlvarezNo ratings yet
- Fuzzy Logic Controller For Four Quadrant Operation of Three Phase BLDC MotorDocument5 pagesFuzzy Logic Controller For Four Quadrant Operation of Three Phase BLDC MotorijtetjournalNo ratings yet
- Embedded Systems Actuators and MotorsDocument47 pagesEmbedded Systems Actuators and MotorsSayeda Asma NoorNo ratings yet
- Research Paper On DC Motor ControlDocument8 pagesResearch Paper On DC Motor Controlfvgjcq6aNo ratings yet
- 43 (Evacuated Solar Tube)Document22 pages43 (Evacuated Solar Tube)Nehul PatilNo ratings yet
- 35 (Gyro Bus) ReportDocument40 pages35 (Gyro Bus) ReportNehul PatilNo ratings yet
- 43 (Evacuated Solar Tube) ReportDocument33 pages43 (Evacuated Solar Tube) ReportNehul PatilNo ratings yet
- 52 (High Voltage DC Transmission Line) ReportDocument35 pages52 (High Voltage DC Transmission Line) ReportNehul PatilNo ratings yet
- 52 (High Voltage DC Transmission Line)Document19 pages52 (High Voltage DC Transmission Line)Nehul PatilNo ratings yet
- Dhiraj Project 3Document38 pagesDhiraj Project 3Nehul PatilNo ratings yet
- ReportDocument57 pagesReportNehul PatilNo ratings yet
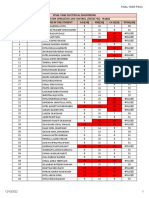
- MSBT E Mumbai EE 3rd Sem Exam Timetable Winter 2022Document2 pagesMSBT E Mumbai EE 3rd Sem Exam Timetable Winter 2022Nehul PatilNo ratings yet
- 20 (Solar Pond) ReportDocument41 pages20 (Solar Pond) ReportNehul PatilNo ratings yet
- Dhiraj Project 2Document7 pagesDhiraj Project 2Nehul PatilNo ratings yet
- Empowered Edge: AI-Enhanced Joint Optimization of Edge Computing and Caching for Vehicular NetworksDocument32 pagesEmpowered Edge: AI-Enhanced Joint Optimization of Edge Computing and Caching for Vehicular NetworksNehul PatilNo ratings yet
- Dhiraj Project 1Document2 pagesDhiraj Project 1Nehul PatilNo ratings yet
- IOT Agriculture MonitoringDocument3 pagesIOT Agriculture MonitoringNehul PatilNo ratings yet
- ReportDocument57 pagesReportNehul PatilNo ratings yet
- Wa0020.Document6 pagesWa0020.Nehul PatilNo ratings yet
- SMakbulHussain GMahaboobBasha 34Document4 pagesSMakbulHussain GMahaboobBasha 34Nehul PatilNo ratings yet
- DR Lal Pathlabs: LPL - Lpl-Rohini (National Reference Lab) Sector - 18, Block - E Rohini Delhi 110085Document2 pagesDR Lal Pathlabs: LPL - Lpl-Rohini (National Reference Lab) Sector - 18, Block - E Rohini Delhi 110085Nehul PatilNo ratings yet
- Niraj Seminar Report Final PrintDocument38 pagesNiraj Seminar Report Final PrintNehul PatilNo ratings yet
- Project ReportDocument33 pagesProject ReportNehul PatilNo ratings yet
- Submitted in Partial Fulfillment of The RequirementsDocument39 pagesSubmitted in Partial Fulfillment of The RequirementsNehul PatilNo ratings yet
- Pradhan Mantri Kisan Samman Nidhi (Pm-Kisan) (Registration Form)Document3 pagesPradhan Mantri Kisan Samman Nidhi (Pm-Kisan) (Registration Form)Nehul PatilNo ratings yet
- Ppi1629a01 CK-MB LiquidDocument2 pagesPpi1629a01 CK-MB LiquidNehul PatilNo ratings yet
- Robotic Motor ReportDocument41 pagesRobotic Motor ReportNehul PatilNo ratings yet
- Science MobileRobotsDocument6 pagesScience MobileRobotsNehul PatilNo ratings yet
- SujitDocument24 pagesSujitNehul PatilNo ratings yet
- Ppi1637a01 CK MB TabletsDocument2 pagesPpi1637a01 CK MB TabletsNehul PatilNo ratings yet
- Iot Base Automatic Vehicle Accdient Detection and Rescue System Stage 1 ReportDocument55 pagesIot Base Automatic Vehicle Accdient Detection and Rescue System Stage 1 ReportNehul PatilNo ratings yet
- Psoc MarkDocument2 pagesPsoc MarkNehul PatilNo ratings yet
- Wireless EV Charging System Using Solar PowerDocument31 pagesWireless EV Charging System Using Solar PowerNehul PatilNo ratings yet
- New Business Quarter: Mintmade DesignsDocument15 pagesNew Business Quarter: Mintmade DesignsKaleigh ForrestNo ratings yet
- (Atlas Copco) - Industrial Power Tools 2012Document332 pages(Atlas Copco) - Industrial Power Tools 2012mg_catana100% (1)
- State Responsibility for Transboundary Environmental HarmDocument13 pagesState Responsibility for Transboundary Environmental HarmAniket SachanNo ratings yet
- Mse 104 HW#4Document2 pagesMse 104 HW#4Dendi ZezimaNo ratings yet
- Technical Specification Centurio L7-1M-S 1250Document3 pagesTechnical Specification Centurio L7-1M-S 1250slobamsNo ratings yet
- SAV Achieving Low Return Temperatures From RadiatorsDocument7 pagesSAV Achieving Low Return Temperatures From RadiatorsNikolay GeorgievNo ratings yet
- GLA University - Student's No Dues DetailsDocument2 pagesGLA University - Student's No Dues DetailsRishi JakarNo ratings yet
- Shop Manual Engine 12V 140e PDFDocument601 pagesShop Manual Engine 12V 140e PDFHarry Wart Wart100% (3)
- Module 5 - Generation of High VoltageDocument48 pagesModule 5 - Generation of High VoltageFah RukhNo ratings yet
- Powerdrive X6: Rotary Steerable System For High-Performance Drilling and Accurate Wellbore PlacementDocument6 pagesPowerdrive X6: Rotary Steerable System For High-Performance Drilling and Accurate Wellbore PlacementClOudyo VirgílioNo ratings yet
- Fac1601 - Fasset Classes - Part 4Document2 pagesFac1601 - Fasset Classes - Part 4Abdullah SalieNo ratings yet
- Year 1 Week 6 WorkbookDocument62 pagesYear 1 Week 6 WorkbookStudent HomeworkNo ratings yet
- Lecture 1: Introduction To Change Management: Fundamental Questions For OrganisationsDocument43 pagesLecture 1: Introduction To Change Management: Fundamental Questions For OrganisationsattilashelleyNo ratings yet
- Microsoft pre-training skills assessment checklistDocument1 pageMicrosoft pre-training skills assessment checklistRichard DiotelesNo ratings yet
- Drawworks ServiceDocument13 pagesDrawworks Servicejairo lopez meza100% (1)
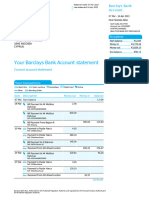
- Barclays Bank UPDATEDocument32 pagesBarclays Bank UPDATEAbdul wahidNo ratings yet
- The Validity of Beck Depression Inventory - Short Version in Depressed Patients Diagnosed According To ICD10Document11 pagesThe Validity of Beck Depression Inventory - Short Version in Depressed Patients Diagnosed According To ICD10sarhang talebaniNo ratings yet
- Large Volume Kit PDFDocument42 pagesLarge Volume Kit PDFDanielRomeroNo ratings yet
- TD Tip Tinner PDFDocument2 pagesTD Tip Tinner PDFbehzadNo ratings yet
- Case Study On Four WheelerDocument35 pagesCase Study On Four WheelerViŠhål PätělNo ratings yet
- Math11 SP Q3 M8 PDFDocument12 pagesMath11 SP Q3 M8 PDFJessa Banawan EdulanNo ratings yet
- Digital Scent TechnologyDocument13 pagesDigital Scent TechnologyRahul Maravi0% (1)
- Notes 2 PDFDocument5 pagesNotes 2 PDFJoel DsouzaNo ratings yet
- Amorphous Solid Dispersions PDFDocument702 pagesAmorphous Solid Dispersions PDFLuisNo ratings yet
- VCap - Mano Flats - PerungalathurDocument1 pageVCap - Mano Flats - PerungalathuromersonNo ratings yet
- Siemens Mammomat 300 Installation and Startup InstructionsDocument93 pagesSiemens Mammomat 300 Installation and Startup Instructionsousama100% (1)
- Perceptron - WikipediaDocument9 pagesPerceptron - WikipediaNoles PandeNo ratings yet
- A10v RexrothDocument3 pagesA10v RexrothHidroil Neuquen Srl100% (1)
- Evolution - The Dissent of DarwinDocument7 pagesEvolution - The Dissent of DarwinluminitalupuliasaNo ratings yet
- Analyzing Vernacular Design Principles of an Andhra Pradesh DwellingDocument9 pagesAnalyzing Vernacular Design Principles of an Andhra Pradesh DwellingtrishaNo ratings yet