You might also like
- Reinforcement Learning Explained - A Step-by-Step Guide to Reward-Driven AIFrom EverandReinforcement Learning Explained - A Step-by-Step Guide to Reward-Driven AINo ratings yet
- Intelligent Agents and EnvironmentDocument9 pagesIntelligent Agents and EnvironmentliwatobNo ratings yet
- Agents in AIDocument14 pagesAgents in AIRitam MajumderNo ratings yet
- Name: Charles Kumar Singh Class: Cse (A) Roll No: 38 Subject: Internet Technology (CS703C) Date and Time: 08/10/2020 & 10:24AMDocument5 pagesName: Charles Kumar Singh Class: Cse (A) Roll No: 38 Subject: Internet Technology (CS703C) Date and Time: 08/10/2020 & 10:24AMCharles SinghNo ratings yet
- AI AgentsDocument9 pagesAI AgentsNirmal Varghese Babu 2528No ratings yet
- W2-Intelligent AgentsDocument36 pagesW2-Intelligent Agentsabbiha.mustafamalikNo ratings yet
- AI Lecture 2Document42 pagesAI Lecture 2Bilal AbbasiNo ratings yet
- Artificial IntelligenceDocument41 pagesArtificial IntelligenceAakash ShresthaNo ratings yet
- Lecture 03Document4 pagesLecture 03AjiaisiNo ratings yet
- Properties of Environment2Document3 pagesProperties of Environment2jhn75070No ratings yet
- Intelligent AgentDocument9 pagesIntelligent AgentDHIVYA BHARATHI PNo ratings yet
- Artificial Intelligence: Agents and EnvironmentDocument27 pagesArtificial Intelligence: Agents and EnvironmentHashim Omar AbukarNo ratings yet
- Intelligent Agents: An IntroductionDocument41 pagesIntelligent Agents: An IntroductionHead CSEAECCNo ratings yet
- AI - Agents & EnvironmentsDocument7 pagesAI - Agents & Environmentsp229252No ratings yet
- Artificial IntelligenceDocument9 pagesArtificial IntelligenceWodari HelenaNo ratings yet
- Lec 03Document40 pagesLec 03Sourabh ShahNo ratings yet
- Study Material3Document3 pagesStudy Material3Praju ThoratNo ratings yet
- The Structure and Types of Intelligent AgentsDocument6 pagesThe Structure and Types of Intelligent AgentsSIDDHANT JAIN 20SCSE1010186No ratings yet
- Sharif College of Engineering and Technology: Artificial Intelligence Assignment # 1Document4 pagesSharif College of Engineering and Technology: Artificial Intelligence Assignment # 1Rehan HabibNo ratings yet
- Chapter Two: Intelligent Agents: Hilcoe School of Computer Science and TechnologyDocument48 pagesChapter Two: Intelligent Agents: Hilcoe School of Computer Science and TechnologyTemam MohammedNo ratings yet
- Properties of Task EnvironmentDocument2 pagesProperties of Task EnvironmentJatadhar100% (2)
- AI - Agents & EnvironmentsDocument6 pagesAI - Agents & EnvironmentsRainrock BrillerNo ratings yet
- By DR Narayana Swamy Ramaiah Professor, Dept of CSE SCSE, FET, JAIN Deemed To Be UniversityDocument27 pagesBy DR Narayana Swamy Ramaiah Professor, Dept of CSE SCSE, FET, JAIN Deemed To Be UniversityDr Narayana Swamy RamaiahNo ratings yet
- Intelligent AgentsDocument27 pagesIntelligent AgentsMalik AwanNo ratings yet
- CH 2 Agents Type and StrcutureDocument28 pagesCH 2 Agents Type and StrcutureYonatan GetachewNo ratings yet
- Ai CH2Document34 pagesAi CH2Nurlign YitbarekNo ratings yet
- Chapter Two-WordDocument10 pagesChapter Two-WordOz GNo ratings yet
- Chapter Two Part 1 ALDocument27 pagesChapter Two Part 1 ALBiruk TesfawNo ratings yet
- AICH2Document38 pagesAICH2Aliyu AhmedNo ratings yet
- NotesDocument12 pagesNotesaNo ratings yet
- Agents in Artificial IntelligenceDocument7 pagesAgents in Artificial IntelligenceJAYANTA GHOSHNo ratings yet
- Chapter 2Document41 pagesChapter 2kiramelaku1No ratings yet
- Agents: Aiza Shabir Lecturer Institute of CS&IT The Women University, MultanDocument30 pagesAgents: Aiza Shabir Lecturer Institute of CS&IT The Women University, MultanShah JeeNo ratings yet
- AI Intro1Document81 pagesAI Intro1saad younasNo ratings yet
- Intelligent Agents Architecture and Behavior TypesDocument31 pagesIntelligent Agents Architecture and Behavior TypesSpiffyladdNo ratings yet
- Chapter 05 Intelligent AgentsDocument26 pagesChapter 05 Intelligent AgentsMuhammad HuzaifaNo ratings yet
- AI Agents and Their EnvironmentsDocument15 pagesAI Agents and Their EnvironmentsKunal KumarNo ratings yet
- Artificial-Intelligence NotesDocument67 pagesArtificial-Intelligence NotesAditi GoelNo ratings yet
- Chap 2 PDFDocument9 pagesChap 2 PDFManish ShresthaNo ratings yet
- Intelligent Agent DefinitionDocument21 pagesIntelligent Agent Definitionali hussainNo ratings yet
- Intelligent Agents and EnvironmentsDocument20 pagesIntelligent Agents and EnvironmentsAngus AnizNo ratings yet
- CSE440_Lect_3_AgentDocument35 pagesCSE440_Lect_3_AgentSumaiya SadiaNo ratings yet
- PEAS Description of Task Environment With Different Types of PropertiesDocument13 pagesPEAS Description of Task Environment With Different Types of PropertiesMonir AhammodNo ratings yet
- Lesson 2 - Introduction To AgentDocument13 pagesLesson 2 - Introduction To AgentEmil StankovNo ratings yet
- Chapter Two SlideDocument33 pagesChapter Two SlideOz GNo ratings yet
- Intelligent Agents Properties and TypesDocument30 pagesIntelligent Agents Properties and TypesHammad KhokharNo ratings yet
- Agents in Artificial IntelligenceDocument20 pagesAgents in Artificial Intelligence517 Anjali KushvahaNo ratings yet
- Mod 2Document11 pagesMod 2Abhishek0001No ratings yet
- CS 4700: Foundations of AIDocument35 pagesCS 4700: Foundations of AIFaaruqNo ratings yet
- Lecture 2 - Rational Agents: Dr. Muhammad Adnan HashmiDocument31 pagesLecture 2 - Rational Agents: Dr. Muhammad Adnan HashmiArsalan AhmedNo ratings yet
- Intelligent AgentsDocument32 pagesIntelligent AgentsHerimantoNo ratings yet
- Intelligent AgentsDocument37 pagesIntelligent AgentssmnehNo ratings yet
- AI-Unit-2 (Updated Handsout)Document14 pagesAI-Unit-2 (Updated Handsout)Nirjal DhamalaNo ratings yet
- Chapter 2 - Intelligent AgentDocument38 pagesChapter 2 - Intelligent AgentmuhammedNo ratings yet
- 2 Intelligent AgentDocument33 pages2 Intelligent AgentsantaNo ratings yet
- Ai 4Document24 pagesAi 4Kashif MehmoodNo ratings yet
- AI Lecture 2 PDFDocument15 pagesAI Lecture 2 PDFJabin Akter JotyNo ratings yet
- 02. Intelligent AgentsDocument62 pages02. Intelligent AgentsRaunak DasNo ratings yet
- Performance: Fully Observable vs. Partially Observable (Accessible vs. Inaccessible)Document2 pagesPerformance: Fully Observable vs. Partially Observable (Accessible vs. Inaccessible)Satheesh BalajiNo ratings yet
- Name Muneeb Khan Bcs University of PeshawarDocument14 pagesName Muneeb Khan Bcs University of PeshawarSamarNo ratings yet
- Developer's Guidelines For Enhancing Software Quality-SamarDocument11 pagesDeveloper's Guidelines For Enhancing Software Quality-SamarSamarNo ratings yet
- 05softwarequalitymanagement 150802165244 Lva1 App6891Document31 pages05softwarequalitymanagement 150802165244 Lva1 App6891SamarNo ratings yet
- Data CompressionDocument113 pagesData CompressionSamarNo ratings yet
- Data CompressionDocument113 pagesData CompressionSamarNo ratings yet
- Case Study TMX QarshiDocument4 pagesCase Study TMX QarshiMuhammad FaisalNo ratings yet
- Reduce Concrete Waste with Bubble Deck SlabsDocument11 pagesReduce Concrete Waste with Bubble Deck Slabsgpt krtlNo ratings yet
- Tecnotest Analizador Gases Dignostico Stargas Family898 495 enDocument12 pagesTecnotest Analizador Gases Dignostico Stargas Family898 495 ennewslemNo ratings yet
- IEC 62040-2 Uninterruptible Power Systems (Ups) - Part 2: Electromagnetic Compatibility (EMC) Requirements Interpretation Sheet 1Document3 pagesIEC 62040-2 Uninterruptible Power Systems (Ups) - Part 2: Electromagnetic Compatibility (EMC) Requirements Interpretation Sheet 1Agfagf212No ratings yet
- Motorola V3i D&G GoldDocument93 pagesMotorola V3i D&G Goldkor_m8No ratings yet
- Updated Atif CV Dec 2o2oDocument5 pagesUpdated Atif CV Dec 2o2oIrfan AtifNo ratings yet
- Module 2Document40 pagesModule 2surya989030No ratings yet
- Petroleum Engineer Fernando MostajoDocument8 pagesPetroleum Engineer Fernando MostajoFernando Mostajo RocaNo ratings yet
- Alan's Hobby, Model & RC FAQ Web Links at 5 Oct 2012Document128 pagesAlan's Hobby, Model & RC FAQ Web Links at 5 Oct 2012Javiheroe de CuentoNo ratings yet
- ETS6630 English User ManualDocument26 pagesETS6630 English User ManualCADASEDANo ratings yet
- KPX K25PDocument5 pagesKPX K25Pczz6723No ratings yet
- Autoform training manual and video tutorial downloadDocument2 pagesAutoform training manual and video tutorial downloadRobinson Parraga25% (8)
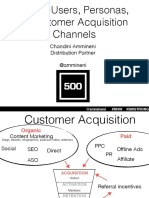
- Power Users, Personas, - Customer Acquisition ChannelsDocument8 pagesPower Users, Personas, - Customer Acquisition ChannelsIngrosso SethNo ratings yet
- U0 - 2482 WESAPI For Microsoft Windows NT User's Guide PDFDocument165 pagesU0 - 2482 WESAPI For Microsoft Windows NT User's Guide PDFOleg SergeevNo ratings yet
- Qps Parbatpur Production DPR: Downtime ReasonDocument2 pagesQps Parbatpur Production DPR: Downtime Reasonsameer bakshiNo ratings yet
- Curriculum Vitae HTS-ING-OCT-09 PDFDocument23 pagesCurriculum Vitae HTS-ING-OCT-09 PDFenlapolitikaNo ratings yet
- Section 200 - Technician's Checklist - Clearing and GrubbingDocument1 pageSection 200 - Technician's Checklist - Clearing and GrubbingKelvin NgugiNo ratings yet
- Auditing Operating System and Network Multiple Choice Questions (With Answers) Micah CaraggayanDocument6 pagesAuditing Operating System and Network Multiple Choice Questions (With Answers) Micah CaraggayanRonald FloresNo ratings yet
- Videoconferencing Tandberg Centric 1000 MXP User ManualDocument280 pagesVideoconferencing Tandberg Centric 1000 MXP User ManualBijubennet GomezNo ratings yet
- The Impact of Digital Advertising On Consumer Purchase DecisionsDocument11 pagesThe Impact of Digital Advertising On Consumer Purchase DecisionsyusufNo ratings yet
- Tadiran PNR-500: Personal Network Radio - Full-Duplex Voice and Data ConferencingDocument4 pagesTadiran PNR-500: Personal Network Radio - Full-Duplex Voice and Data ConferencingPeter Bobocky100% (1)
- Group2 Assignment (Sensors)Document19 pagesGroup2 Assignment (Sensors)Judien DelaCruz Cahapay DumanhugNo ratings yet
- Smart Grid Maturity Model SGMM Model DefinitionDocument86 pagesSmart Grid Maturity Model SGMM Model DefinitionSoftware Engineering Institute PublicationsNo ratings yet
- Fire Safety in HospitalDocument3 pagesFire Safety in HospitaldrRT83No ratings yet
- HP Elite X2 1012 Service ManualDocument90 pagesHP Elite X2 1012 Service ManualHomer LarchNo ratings yet
- Guidelines For Good Stories: Start With Goal StoriesDocument10 pagesGuidelines For Good Stories: Start With Goal StoriesAlex CruzNo ratings yet
- Certificate Declaration Index and AcknowledgementDocument5 pagesCertificate Declaration Index and AcknowledgementNidhi ShahNo ratings yet
- Dawn of The NetDocument16 pagesDawn of The NetSwayamprakash Rout100% (1)
- CVE4215. Topic 1-Introduction To EstimatingDocument27 pagesCVE4215. Topic 1-Introduction To EstimatingCTLiewEuGene100% (1)
- Full Download Enterprise Systems For Management 2nd Edition Motiwalla Solutions ManualDocument20 pagesFull Download Enterprise Systems For Management 2nd Edition Motiwalla Solutions Manualstun.lisnejbko8h100% (40)