You might also like
- The Czech and Slovak Republics: Twenty years of Independence, 1993–2013From EverandThe Czech and Slovak Republics: Twenty years of Independence, 1993–2013No ratings yet
- Konark Institute of Science & TechnologyDocument26 pagesKonark Institute of Science & TechnologyDev KumarNo ratings yet
- Panel ATS - AMF: Jl. Penghela 12 Surabaya Telp. +6231-5465040, Fax.+6231-5351080Document14 pagesPanel ATS - AMF: Jl. Penghela 12 Surabaya Telp. +6231-5465040, Fax.+6231-5351080dargom salamanNo ratings yet
- مهند حكمي - مخططات الالكتروميكانيكDocument27 pagesمهند حكمي - مخططات الالكتروميكانيكMohamed IbrahimNo ratings yet
- STAT242 Assignment 2Document4 pagesSTAT242 Assignment 2SamvanBetuwNo ratings yet
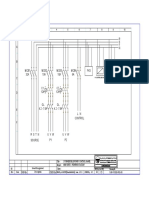
- Changeover - 3 FazDocument1 pageChangeover - 3 FazthaNo ratings yet
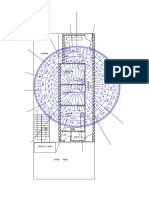
- Atap 3Document1 pageAtap 3Ibrahim Surya WijayaNo ratings yet
- C MEC DWG 730 40558 B - Code 1Document4 pagesC MEC DWG 730 40558 B - Code 1Ramzi ZoghlamiNo ratings yet
- SBCF - Rnav Kimus 1a Rwy 34 - Star - 20210225Document1 pageSBCF - Rnav Kimus 1a Rwy 34 - Star - 20210225Gustavo GuguNo ratings yet
- N E N W: ConsultantDocument1 pageN E N W: ConsultantKhem ThapaNo ratings yet
- Mfg:Durga Power Solutions Ganguru VIJAYAWADA-521139: VFD Bypass Asd ControlDocument1 pageMfg:Durga Power Solutions Ganguru VIJAYAWADA-521139: VFD Bypass Asd Controlsai krishnaNo ratings yet
- Detour: Beg'G. of Flodd Control Beg'G. of Flodd ControlDocument1 pageDetour: Beg'G. of Flodd Control Beg'G. of Flodd ControlEmmanuel CristobalNo ratings yet
- Sample Welding Map Project Kecil PDFDocument1 pageSample Welding Map Project Kecil PDFMuhammad Fitransyah Syamsuar Putra100% (1)
- Installation Instruction Instructions On SFD Activation (ODIS)Document8 pagesInstallation Instruction Instructions On SFD Activation (ODIS)Diego MarangonNo ratings yet
- Narsarsuaq, Greenland Bgbw/Uak: Rwy 25 DepartureDocument7 pagesNarsarsuaq, Greenland Bgbw/Uak: Rwy 25 DepartureCatalin CiocarlanNo ratings yet
- E6 E7 E8 S1 S2: Storage Storage Office Books FilesDocument1 pageE6 E7 E8 S1 S2: Storage Storage Office Books FilesNAMENo ratings yet
- MLC 100Document20 pagesMLC 100mahfoud ascenseursNo ratings yet
- WS3 2Document1 pageWS3 2batrisyiairdinaaaaNo ratings yet
- Popular 66kv Feeder 2010-11Document19 pagesPopular 66kv Feeder 2010-11Vadiyatar DilipNo ratings yet
- Slide CA Chapter 3 Memory Systems Lecture 5Document52 pagesSlide CA Chapter 3 Memory Systems Lecture 5TIẾN VŨ VĂNNo ratings yet
- Banglow Design Time Problem - Sem VIII (2020-21)Document2 pagesBanglow Design Time Problem - Sem VIII (2020-21)Apurva GourNo ratings yet
- Curvas SN Definicoes EstimativaDocument8 pagesCurvas SN Definicoes EstimativaLeandro Lima RamaldesNo ratings yet
- Climate - Tympan Mapospheres: SSE SS W 10Document1 pageClimate - Tympan Mapospheres: SSE SS W 10Antônio AssisNo ratings yet
- Visio-CONV - Z INV + VIB ABB V1 - 0Document4 pagesVisio-CONV - Z INV + VIB ABB V1 - 0mochammad aripinNo ratings yet
- Suresh Malla-Model - PDF S4Document1 pageSuresh Malla-Model - PDF S4Khem ThapaNo ratings yet
- Lal Bagh NW PointDocument1 pageLal Bagh NW PointRonnit gargNo ratings yet
- Jwfp-Wttp-Me-Gad-03-001 Skimming Rev0 T-010 PDFDocument1 pageJwfp-Wttp-Me-Gad-03-001 Skimming Rev0 T-010 PDFihyaNo ratings yet
- 3401 C T DG 1500Document1 page3401 C T DG 1500AEK BKHSNo ratings yet
- Pilot Lamp Button & Switch Omron: Nama: NPM: KelompokDocument1 pagePilot Lamp Button & Switch Omron: Nama: NPM: KelompokRedjoel 123No ratings yet
- Layout Plan (GF) With Devta MarkingDocument1 pageLayout Plan (GF) With Devta Markingprasad annaluruNo ratings yet
- 9th Dipositor ManualDocument35 pages9th Dipositor ManualJahidul IslamNo ratings yet
- The Park Shop Drawings 7 / 2 5 / 1 7Document17 pagesThe Park Shop Drawings 7 / 2 5 / 1 7Kinh MaNo ratings yet
- Planta Parqueadero FinalDocument1 pagePlanta Parqueadero FinalAlejandro LoraNo ratings yet
- Topography Map Umalas Badung 2022.11.09Document5 pagesTopography Map Umalas Badung 2022.11.09Jack BendNo ratings yet
- DIgSILENT Voltage Profile-LAMHUN 2 EGAT - LineDocument1 pageDIgSILENT Voltage Profile-LAMHUN 2 EGAT - LineNoptana TummasitNo ratings yet
- Toshiba/Houston: Totally-Enclosed Fan-CooledDocument4 pagesToshiba/Houston: Totally-Enclosed Fan-CooledmarceloNo ratings yet
- Adobe Scan 29 Nov 2022Document1 pageAdobe Scan 29 Nov 2022Devendra TyagiNo ratings yet
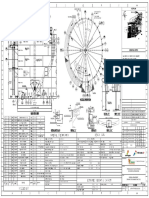
- Crane Layout at 8Th Floor: SCALE 1:200Document1 pageCrane Layout at 8Th Floor: SCALE 1:200subashNo ratings yet
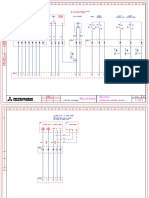
- LIFTER WIRING DiagramDocument1 pageLIFTER WIRING DiagramsunanNo ratings yet
- ST SD Ta 0012 0023 00Document12 pagesST SD Ta 0012 0023 00Muneeswaran BalaguruNo ratings yet
- Sflow ShearDocument2 pagesSflow ShearAngelNo ratings yet
- 01 - Ground Floor PlanDocument1 page01 - Ground Floor PlanmanojsiryaNo ratings yet
- Safety Switch (Belly) : New Tiller Lavansiirtäjät Ja Pinoajat Pallet and Stacker TrucksDocument2 pagesSafety Switch (Belly) : New Tiller Lavansiirtäjät Ja Pinoajat Pallet and Stacker TrucksДмитро СелютінNo ratings yet
- JATRATTI - Model PDFDocument1 pageJATRATTI - Model PDFHansraj ThoratNo ratings yet
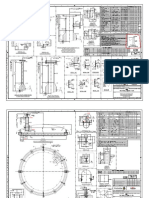
- Peso Tank Fabrication DWGDocument1 pagePeso Tank Fabrication DWGRishabh VermaNo ratings yet
- 1Document1 page1Thuan VoNo ratings yet
- Toilet Vip 1 DormiDocument42 pagesToilet Vip 1 Dormimuhamad ega alfianaNo ratings yet
- Xperiment N XperienceDocument2 pagesXperiment N Xperiencevishnu csNo ratings yet
- Hotel DrawingsDocument22 pagesHotel DrawingsBinarasiri FernandoNo ratings yet
- Upper ClampDocument1 pageUpper ClampSanjay HansdahNo ratings yet
- CT Novar 01 - 2750 Ups 15.7Document9 pagesCT Novar 01 - 2750 Ups 15.7Văn Quyền NguyễnNo ratings yet
- S 590 NicDocument27 pagesS 590 NicKudakwashe BeresNo ratings yet
- Perth (YPPH)Document62 pagesPerth (YPPH)LuisGuillermoReyesNo ratings yet
- Switch - Disconnector Base Mounting: 2P - 3P - 3P+NDocument9 pagesSwitch - Disconnector Base Mounting: 2P - 3P - 3P+NVildanNo ratings yet
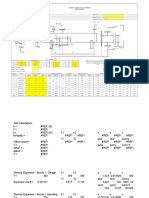
- Summary of Anchor / Nozzle Movements Heat Exchanger: Harish Toki 12-Jul-02 SA-516-70N 8-3E-7 1 SA-516-70NDocument18 pagesSummary of Anchor / Nozzle Movements Heat Exchanger: Harish Toki 12-Jul-02 SA-516-70N 8-3E-7 1 SA-516-70Nreach_arindomNo ratings yet
- SUBMERSIBLE PANELS-Model3Document1 pageSUBMERSIBLE PANELS-Model3ahmed fathyNo ratings yet
- Lot Plotting 2Document1 pageLot Plotting 2RicaBalbarosaNo ratings yet
- Jeppview For Windows: General Information General InformationDocument5 pagesJeppview For Windows: General Information General InformationKNONo ratings yet
- Module 1.1 IF Electrical BasicsDocument102 pagesModule 1.1 IF Electrical BasicsКалин АнгеловNo ratings yet
- Module 1.1 IF Positioning MeasurementsDocument52 pagesModule 1.1 IF Positioning MeasurementsКалин АнгеловNo ratings yet
- Module 1.1 IF Movements, Forces and TorquesDocument39 pagesModule 1.1 IF Movements, Forces and TorquesКалин АнгеловNo ratings yet
- 03 - ED Technical Training Part 3Document18 pages03 - ED Technical Training Part 3Калин АнгеловNo ratings yet
- 04 - ED Technical Training Part 4Document31 pages04 - ED Technical Training Part 4Калин АнгеловNo ratings yet
- 01 - ED Technical Training Part 1Document76 pages01 - ED Technical Training Part 1Калин АнгеловNo ratings yet
- Irf3710 PDFDocument8 pagesIrf3710 PDFJose M PeresNo ratings yet
- Exp 12) Prbs Generator and Shift RegisterDocument5 pagesExp 12) Prbs Generator and Shift RegisterMani BharathiNo ratings yet
- PR 36 MF 22Document13 pagesPR 36 MF 22bahmanNo ratings yet
- A3930 1 Datasheet PDFDocument21 pagesA3930 1 Datasheet PDFKaan GünayNo ratings yet
- Plagiarism ReportDocument27 pagesPlagiarism ReportKuldeep MunjaniNo ratings yet
- 07 WECC Wind Generator Modeling طاقة الرياحDocument15 pages07 WECC Wind Generator Modeling طاقة الرياحRafik MeksenNo ratings yet
- Eeprom 29c040Document13 pagesEeprom 29c040api-3710567No ratings yet
- W100 - W100ANA: Installation and User ManualDocument40 pagesW100 - W100ANA: Installation and User ManualttchangcodonNo ratings yet
- Configuring Poe: Finding Feature InformationDocument18 pagesConfiguring Poe: Finding Feature InformationEsromdNo ratings yet
- Wireless PDFDocument9 pagesWireless PDFjasjasmeenkaur0% (2)
- 1430807191660-Hassdac Manual PDFDocument157 pages1430807191660-Hassdac Manual PDFPooja SinghNo ratings yet
- EE8251 Circuit Theory NotesDocument147 pagesEE8251 Circuit Theory Notessaravanakmar vNo ratings yet
- HD Multimedia Price List 2011 HRDocument1 pageHD Multimedia Price List 2011 HRbasmitrebatoNo ratings yet
- Electric Comment 26 20 00Document9 pagesElectric Comment 26 20 00Imtiyaz KhanNo ratings yet
- Equalizer RingsDocument1 pageEqualizer RingsMr. No oneNo ratings yet
- SolarDocument10 pagesSolarsunilNo ratings yet
- Substations PDFDocument37 pagesSubstations PDFRah MliNo ratings yet
- Authentic TextDocument2 pagesAuthentic TextKeandre LeukesNo ratings yet
- K. L. E. Institute of Technology, Hubballi Dept of Information Science Engg. Sem: IiiDocument2 pagesK. L. E. Institute of Technology, Hubballi Dept of Information Science Engg. Sem: IiichaitanyaNo ratings yet
- Flintec: Type RC3 Load CellDocument2 pagesFlintec: Type RC3 Load CellHermantoro W. PradanaNo ratings yet
- RailwayDocument30 pagesRailwayAntaripaBhuyanNo ratings yet
- JVC KD-G820 User ManualDocument352 pagesJVC KD-G820 User ManualfunkenfunkNo ratings yet
- AnuanDocument9 pagesAnuanTiio GatesNo ratings yet
- Mx180 50th Anniversary Use PDFDocument28 pagesMx180 50th Anniversary Use PDFAndoni Zarate EzcurraNo ratings yet
- Lighting Katalog 2014Document25 pagesLighting Katalog 2014team37No ratings yet
- SFN eRAN13.1 - 09 20210826214516Document440 pagesSFN eRAN13.1 - 09 20210826214516Manuel_VINo ratings yet
- D LQ PW: High Performance CCFL ControllerDocument2 pagesD LQ PW: High Performance CCFL Controllerxinuxnt256No ratings yet
- Option H2 and H9 Modbus Communication 4189340442 UKDocument203 pagesOption H2 and H9 Modbus Communication 4189340442 UKdesrico20039088No ratings yet
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyFrom EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyRating: 3.5 out of 5 stars3.5/5 (111)
- The Future of Geography: How the Competition in Space Will Change Our WorldFrom EverandThe Future of Geography: How the Competition in Space Will Change Our WorldRating: 4 out of 5 stars4/5 (6)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- Algorithms to Live By: The Computer Science of Human DecisionsFrom EverandAlgorithms to Live By: The Computer Science of Human DecisionsRating: 4.5 out of 5 stars4.5/5 (722)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.From EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Rating: 5 out of 5 stars5/5 (34)
- Cyber War: The Next Threat to National Security and What to Do About ItFrom EverandCyber War: The Next Threat to National Security and What to Do About ItRating: 3.5 out of 5 stars3.5/5 (66)
- Digital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyFrom EverandDigital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyRating: 4 out of 5 stars4/5 (51)
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- The E-Myth Revisited: Why Most Small Businesses Don't Work andFrom EverandThe E-Myth Revisited: Why Most Small Businesses Don't Work andRating: 4.5 out of 5 stars4.5/5 (709)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (228)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceFrom EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (5)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyFrom EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNo ratings yet
- The Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumFrom EverandThe Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumRating: 3 out of 5 stars3/5 (12)
- Mini Farming: Self-Sufficiency on 1/4 AcreFrom EverandMini Farming: Self-Sufficiency on 1/4 AcreRating: 4 out of 5 stars4/5 (76)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- The Manager's Path: A Guide for Tech Leaders Navigating Growth and ChangeFrom EverandThe Manager's Path: A Guide for Tech Leaders Navigating Growth and ChangeRating: 4.5 out of 5 stars4.5/5 (99)
- Reality+: Virtual Worlds and the Problems of PhilosophyFrom EverandReality+: Virtual Worlds and the Problems of PhilosophyRating: 4 out of 5 stars4/5 (24)
- Solutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesFrom EverandSolutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesNo ratings yet
- Restoration Agriculture: Real-World Permaculture for FarmersFrom EverandRestoration Agriculture: Real-World Permaculture for FarmersRating: 4.5 out of 5 stars4.5/5 (86)
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerFrom EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerRating: 4.5 out of 5 stars4.5/5 (44)
- AI Superpowers: China, Silicon Valley, and the New World OrderFrom EverandAI Superpowers: China, Silicon Valley, and the New World OrderRating: 4.5 out of 5 stars4.5/5 (398)