You might also like
- Unit - I AiDocument26 pagesUnit - I Aichandru kNo ratings yet
- Unit 1: Thinking RationallyDocument14 pagesUnit 1: Thinking RationallyKarthickNo ratings yet
- Artificial IntelligenceDocument44 pagesArtificial Intelligenceddteo100% (1)
- Seminar Report ON: Ai and Its Intelligent AgentsDocument17 pagesSeminar Report ON: Ai and Its Intelligent AgentsRupesh SharmaNo ratings yet
- Ai Unit 1 NotesDocument19 pagesAi Unit 1 NotesIndumathiNo ratings yet
- AI Chapter 1Document27 pagesAI Chapter 1Mitiku TamiratNo ratings yet
- How Artificial Intelligence (AI)Document6 pagesHow Artificial Intelligence (AI)frankNo ratings yet
- Artificial Intelligence - IntroductionDocument40 pagesArtificial Intelligence - IntroductionAbhishek SainiNo ratings yet
- NotesDocument12 pagesNotesaNo ratings yet
- Ai Unit1 Notes Finalai 2017Document71 pagesAi Unit1 Notes Finalai 2017Poovarasan 8069No ratings yet
- Agents and Actions: Artificial IntelligenceDocument15 pagesAgents and Actions: Artificial IntelligenceKunal KumarNo ratings yet
- Artificial Intelligence and Machine LearningDocument36 pagesArtificial Intelligence and Machine LearningMOVIETADKANo ratings yet
- AI QuestionBank PartA&PartB RejinpaulDocument111 pagesAI QuestionBank PartA&PartB RejinpaulEdappadi k. PalaniswamiNo ratings yet
- Unit 01Document59 pagesUnit 01gowdaveeresh494No ratings yet
- Ai Unit 1Document38 pagesAi Unit 1Mayank RajNo ratings yet
- Chapter 2Document29 pagesChapter 2oromafi tubeNo ratings yet
- Module 1Document52 pagesModule 1rithusagar5No ratings yet
- Sixteen Marks Unit - 1: Problem Solving 1. What Is Artificial Intelligence?Document38 pagesSixteen Marks Unit - 1: Problem Solving 1. What Is Artificial Intelligence?ramalingasaravananNo ratings yet
- 2 AgentsDocument72 pages2 AgentsxyroniasNo ratings yet
- Artificial Intelligence Unit-1 Introduction and Intelligent AgentsDocument16 pagesArtificial Intelligence Unit-1 Introduction and Intelligent AgentsMukesh100% (1)
- AIDocument61 pagesAIमेनसन लाखेमरूNo ratings yet
- Artificial IntelligenceDocument331 pagesArtificial IntelligenceMukul.A. MaharajNo ratings yet
- Module 1 - DasDocument76 pagesModule 1 - DaskamalisiddharthanNo ratings yet
- BCS303 - Artificial Intelligence Part1 31st Oct 2023Document6 pagesBCS303 - Artificial Intelligence Part1 31st Oct 2023Adam ChengulaNo ratings yet
- Chapter 2 - Intelligent AgentDocument38 pagesChapter 2 - Intelligent AgentmuhammedNo ratings yet
- AI Lecture FirstYear Unit 2 Lec 1Document7 pagesAI Lecture FirstYear Unit 2 Lec 1Aryansh KulshreshthaNo ratings yet
- AI Intro1Document81 pagesAI Intro1saad younasNo ratings yet
- Ai UgDocument315 pagesAi UgUgochukwu Elekwachi100% (1)
- What Is Knowledge Representation?Document6 pagesWhat Is Knowledge Representation?SIDDHANT JAIN 20SCSE1010186No ratings yet
- Agents: Reference Book: Artificial Intelligent A Modern Approach Zaib Un NisaDocument80 pagesAgents: Reference Book: Artificial Intelligent A Modern Approach Zaib Un NisaMadiha AsadNo ratings yet
- cs8691 - 2 Marks With AnswersDocument31 pagescs8691 - 2 Marks With AnswersMs.Jetlin Asst.Prof100% (1)
- Artificial Intelligence Research PaperDocument13 pagesArtificial Intelligence Research PaperJoNo ratings yet
- Artificial - Intelegence-1 - AutosavedDocument155 pagesArtificial - Intelegence-1 - AutosavedMuluneh DebebeNo ratings yet
- BCS 3701 - Artificial IntelligenceDocument10 pagesBCS 3701 - Artificial IntelligenceColossus GamingNo ratings yet
- Artificial IntelligenceDocument29 pagesArtificial IntelligenceBatman The Caped CrusaderNo ratings yet
- AI Lec1Document33 pagesAI Lec1ahmed abdelmoneimNo ratings yet
- AI-Unit-2 (Updated Handsout)Document14 pagesAI-Unit-2 (Updated Handsout)Nirjal DhamalaNo ratings yet
- Chapter 2 AIDocument56 pagesChapter 2 AIOlana TeressaNo ratings yet
- Artificial IntelligenceDocument40 pagesArtificial IntelligenceHimanshu UpadhyayNo ratings yet
- Ai 1Document33 pagesAi 1Shaza KhotNo ratings yet
- Artificial IntelligenceDocument3 pagesArtificial IntelligenceAkinola Damilare SamsonNo ratings yet
- Agents in Artificial Intelligence Chap 1Document9 pagesAgents in Artificial Intelligence Chap 1Gyu.tarwristNo ratings yet
- Agents: G.Victo Sudha GeorgeDocument28 pagesAgents: G.Victo Sudha GeorgeS.Srinidhi sandoshkumarNo ratings yet
- Ai 01Document42 pagesAi 01Debashish DekaNo ratings yet
- Chapter 1 - IntrodutionDocument32 pagesChapter 1 - IntrodutionnatnaelNo ratings yet
- Assessment 1 - QuizDocument2 pagesAssessment 1 - QuizianNo ratings yet
- Overview of Artificial Intelligence: Module - Lecture Notes Isp542/Its462Document9 pagesOverview of Artificial Intelligence: Module - Lecture Notes Isp542/Its462Ay SyNo ratings yet
- There Are Several Types of AIDocument8 pagesThere Are Several Types of AIHansraj KumarNo ratings yet
- Lecture NotesDocument40 pagesLecture NotesprakritideuriNo ratings yet
- AICH2Document38 pagesAICH2Aliyu AhmedNo ratings yet
- Agents in Artificial IntelligenceDocument8 pagesAgents in Artificial Intelligenceolastig technologiesNo ratings yet
- Unit 1 Question With Answer2Document9 pagesUnit 1 Question With Answer2Abhishek GoyalNo ratings yet
- 1.2 Application of Artificial Intelligence 1.2.1.0 GamesDocument7 pages1.2 Application of Artificial Intelligence 1.2.1.0 GamesSameerNo ratings yet
- Chapter 2 - Inteligent AgentDocument31 pagesChapter 2 - Inteligent AgentDawit AndargachewNo ratings yet
- AI Sem V Solution Nov 2O18 Pallavi Tawde PDFDocument22 pagesAI Sem V Solution Nov 2O18 Pallavi Tawde PDFMG GalactusNo ratings yet
- Lecture 1Document30 pagesLecture 1J CNo ratings yet
- Ainotes Module1 UpdatedDocument23 pagesAinotes Module1 UpdatedManjunath YadavNo ratings yet
- Module - 1 - Tie AnswersDocument8 pagesModule - 1 - Tie Answersrohithkumar182918No ratings yet
- Artificial Intelligence Complete: Fundamentals and ApplicationsFrom EverandArtificial Intelligence Complete: Fundamentals and ApplicationsNo ratings yet
- BE Physics-Solution PDFDocument235 pagesBE Physics-Solution PDFRajeev PaudelNo ratings yet
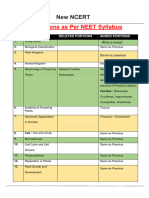
- New NCERTDocument3 pagesNew NCERTajmalhusain1082007No ratings yet
- Why Are You Applying For Financial AidDocument2 pagesWhy Are You Applying For Financial AidqwertyNo ratings yet
- 4.0 Air Separators 4.1Document31 pages4.0 Air Separators 4.1Dilnesa Ejigu100% (1)
- Analisis Perencanaan Strategis Sebagai Determinan Kinerja Perusahaan Daerah Air Minum PDAM Kota Gorontalo PDFDocument19 pagesAnalisis Perencanaan Strategis Sebagai Determinan Kinerja Perusahaan Daerah Air Minum PDAM Kota Gorontalo PDFMuhammat Nur SalamNo ratings yet
- Watson SPEECH TO TEXT Code Snippet.rDocument2 pagesWatson SPEECH TO TEXT Code Snippet.rLucia Carlina Puzzar QuinteroNo ratings yet
- MicroStructPy A Statistical Microstructure Mesh GeDocument6 pagesMicroStructPy A Statistical Microstructure Mesh GeMike JohanssenNo ratings yet
- The Journal of The Acoustical Society of AmericaDocument12 pagesThe Journal of The Acoustical Society of Americadr01dNo ratings yet
- Bulk MicromachiningDocument14 pagesBulk MicromachiningSrilakshmi MNo ratings yet
- Language and The Pursuit of Hap - Chalmers BrothersDocument1,184 pagesLanguage and The Pursuit of Hap - Chalmers BrothersGeorge Adrian Oprea100% (2)
- tgs2600 Product Information Rev02 PDFDocument2 pagestgs2600 Product Information Rev02 PDFAbhishek SinghNo ratings yet
- Core Vendor PDFDocument215 pagesCore Vendor PDFSakar EngitechNo ratings yet
- RSLogix 5000 Report(s) 120511Document74 pagesRSLogix 5000 Report(s) 120511Renji JacobNo ratings yet
- Fallas de ManeaderoDocument17 pagesFallas de ManeaderoGerman Martinez RomoNo ratings yet
- Automobile Engineering NotesDocument120 pagesAutomobile Engineering Notesakshay2992No ratings yet
- T2 Homework 2Document3 pagesT2 Homework 2Aziz Alusta OmarNo ratings yet
- 03 Vertical Pump Test ANSI HI 2.6 2000Document48 pages03 Vertical Pump Test ANSI HI 2.6 2000Benny RivasNo ratings yet
- Ind As 108Document6 pagesInd As 108Khushi SoniNo ratings yet
- Data Center Cooling SolutionsDocument24 pagesData Center Cooling SolutionsGemelita Ortiz100% (1)
- Teacher's Guide Communicative English IDocument10 pagesTeacher's Guide Communicative English IEstif Habeshawi87% (200)
- Hot-Rolled Steel Beam Calculation To AISC 360-16Document2 pagesHot-Rolled Steel Beam Calculation To AISC 360-16vanda_686788867No ratings yet
- Estadistica MultivariableDocument360 pagesEstadistica MultivariableHarley Pino MuñozNo ratings yet
- DSNHP00197140000690828 2022Document2 pagesDSNHP00197140000690828 2022Vidya SagarNo ratings yet
- Automate Premium ApplicationDocument180 pagesAutomate Premium ApplicationpaulvaihelNo ratings yet
- Fatigue BasicsDocument30 pagesFatigue BasicsABY.SAAJEDI879No ratings yet
- TMS TAdvPolyList Quick Start Guide PDFDocument5 pagesTMS TAdvPolyList Quick Start Guide PDFwilkerNo ratings yet
- Numerical Study of Depressurization Rate During Blowdown Based On Lumped Model AnalysisDocument11 pagesNumerical Study of Depressurization Rate During Blowdown Based On Lumped Model AnalysisamitNo ratings yet
- COMSOL WebinarDocument38 pagesCOMSOL WebinarkOrpuzNo ratings yet
- Understanding M-Values PDFDocument9 pagesUnderstanding M-Values PDFrolandoNo ratings yet
- Anaphy Lec 1Document2 pagesAnaphy Lec 1Kiana SanchezNo ratings yet