You might also like
- Chapter5A TORQUEDocument20 pagesChapter5A TORQUENathaniel ParayaoNo ratings yet
- 2Qf TORQUEDocument20 pages2Qf TORQUERey PeñarandaNo ratings yet
- TorqueDocument39 pagesTorqueBryce DuranNo ratings yet
- Moment of InertiaDocument16 pagesMoment of InertiaDiane Dinglasa TobiasNo ratings yet
- Torque and Angular MomentumDocument24 pagesTorque and Angular Momentum88No1FanNo ratings yet
- 4.5 Moments and EquilibriumDocument31 pages4.5 Moments and EquilibriumAmal KhalidNo ratings yet
- Me6505 Model Exam I QP Set A&bDocument9 pagesMe6505 Model Exam I QP Set A&bvenkatesh naiduNo ratings yet
- Lecture 16 Rotational Torque Nov 8-1Document22 pagesLecture 16 Rotational Torque Nov 8-1Sterling Phillip ThomasNo ratings yet
- Rotation of Rigid BodiesDocument23 pagesRotation of Rigid BodiesMariam HishamNo ratings yet
- CH 10Document29 pagesCH 10Ardian20No ratings yet
- Mech6036 40Document20 pagesMech6036 40Vikas Keshari100% (1)
- PHYSICS I FORCES AND EQUILIBRIUM 2nd CONDITIONDocument7 pagesPHYSICS I FORCES AND EQUILIBRIUM 2nd CONDITIONpauljames.gonzalesNo ratings yet
- 2 Rad S: Applied ForceDocument2 pages2 Rad S: Applied Forcehehe ambosNo ratings yet
- 3 Forced VibrationsDocument62 pages3 Forced VibrationsAshishAgarwalNo ratings yet
- Second Law of EquilibriumDocument17 pagesSecond Law of Equilibriumjoshua bravoNo ratings yet
- Lesson 8 ROTATIONAL MOTION AND EQUILIBRIUM 1Document13 pagesLesson 8 ROTATIONAL MOTION AND EQUILIBRIUM 1Dianna GwennNo ratings yet
- Torque Prof Alsaad JUSTDocument17 pagesTorque Prof Alsaad JUSTabood kofahiNo ratings yet
- Phys101 Lectures 16, 17, 18: Rotational MotionDocument36 pagesPhys101 Lectures 16, 17, 18: Rotational MotionAldo Setyawan JayaNo ratings yet
- General Physics 1 Q2 W1 M1 LDS Static-Equilibrium ALG RTPDocument17 pagesGeneral Physics 1 Q2 W1 M1 LDS Static-Equilibrium ALG RTPJaz KadiaNo ratings yet
- p111 Lecture16 PDFDocument28 pagesp111 Lecture16 PDFSheena LidasanNo ratings yet
- Solved Problems in VibrationDocument57 pagesSolved Problems in VibrationRasikaPereraNo ratings yet
- PTY260S - Lecture - Milling Calculation - 2019Document13 pagesPTY260S - Lecture - Milling Calculation - 2019carleston thurgoodNo ratings yet
- Lab Report-4: Melde's ExperimentDocument14 pagesLab Report-4: Melde's ExperimentSana Ashfaq100% (2)
- AH RMA PPT 4.-Central-ForceDocument29 pagesAH RMA PPT 4.-Central-ForceFrank SkellyNo ratings yet
- Guide of VibrationDocument16 pagesGuide of VibrationManuelNo ratings yet
- DC and AC Currents. A Sinusoid. Using Complex NumbersDocument65 pagesDC and AC Currents. A Sinusoid. Using Complex NumbersPadarbinda SamalNo ratings yet
- Momen Gaya WaDocument11 pagesMomen Gaya Wasutrisno trisNo ratings yet
- MV (7th&8th) May2022Document3 pagesMV (7th&8th) May2022Amit AngralNo ratings yet
- Pertemuan 6 Sistem Gaya Dan MomenDocument28 pagesPertemuan 6 Sistem Gaya Dan MomenBeniNo ratings yet
- (Applied Mechanics) Chapter 3 - Equivalent Systems of ForceDocument74 pages(Applied Mechanics) Chapter 3 - Equivalent Systems of Forceafiq danialNo ratings yet
- Chapter3 MomentandcouplesDocument45 pagesChapter3 Momentandcouplesmuhammad adnielNo ratings yet
- Fy 276 Mpa: Formula For Transferring The Weight of Slab To BeamDocument19 pagesFy 276 Mpa: Formula For Transferring The Weight of Slab To Beamraymark mendozaNo ratings yet
- Iii-Resultant Of Non-Concurrent Forces R =∑F R =∑F ∑M = Rd θ=tanDocument7 pagesIii-Resultant Of Non-Concurrent Forces R =∑F R =∑F ∑M = Rd θ=tanMir Mustafa AliNo ratings yet
- TD Cours Tipe PDFDocument25 pagesTD Cours Tipe PDFAnonymous hyeNVbcONo ratings yet
- Electricity and MagnetismDocument16 pagesElectricity and MagnetismHazel Riyenzi100% (1)
- PHS 105 - B 2cjupj1Document10 pagesPHS 105 - B 2cjupj1olajummy675No ratings yet
- The Ability of A Force To Rotate A Body About Some Axis.: TorqueDocument37 pagesThe Ability of A Force To Rotate A Body About Some Axis.: TorqueWendy RissmeyerNo ratings yet
- Solution: Given Data:: 165 Kpa 69 CDocument30 pagesSolution: Given Data:: 165 Kpa 69 Cyogeshkumar3089_8250No ratings yet
- Solution: Given Data:: 165 Kpa 69 CDocument83 pagesSolution: Given Data:: 165 Kpa 69 Cyogeshkumar3089_8250No ratings yet
- Major Test: Hints & SolutionsDocument9 pagesMajor Test: Hints & SolutionsRahul AryanNo ratings yet
- Concrete External Vibration BrochureDocument16 pagesConcrete External Vibration BrochureNuM NaNo ratings yet
- 2 TorqueDocument30 pages2 TorqueAngelika ValenciaNo ratings yet
- Part Two: Oscillations, Waves, & FluidsDocument32 pagesPart Two: Oscillations, Waves, & FluidssteveNo ratings yet
- Linear Motion vs. Rotational MotionDocument24 pagesLinear Motion vs. Rotational MotionSai DeepakNo ratings yet
- Engineering Mechanics A NotesDocument8 pagesEngineering Mechanics A NotesTourlêy MunroNo ratings yet
- Drives GeneralDocument136 pagesDrives Generalsaba sabariNo ratings yet
- Chapter 3Document35 pagesChapter 3Andrew SebastianNo ratings yet
- Chapter 9: Rotational MotionDocument16 pagesChapter 9: Rotational MotionShubham MalhotraNo ratings yet
- MCQ Based On Force For Class-10Document9 pagesMCQ Based On Force For Class-10RedNo ratings yet
- Additional Problems On RotationDocument34 pagesAdditional Problems On RotationJahidul HasanNo ratings yet
- Ac Single Phase First PartDocument32 pagesAc Single Phase First PartreyiNo ratings yet
- Mi ElecrrodynamicDocument26 pagesMi ElecrrodynamicEvoque YTNo ratings yet
- TorqueDocument23 pagesTorquedeilefernandez15No ratings yet
- Exam III PHY 2049 Summer C July 16, 2008Document7 pagesExam III PHY 2049 Summer C July 16, 2008Ytzel NëssieNo ratings yet
- Sample Problem 3/19: Kinetics of ParticlesDocument6 pagesSample Problem 3/19: Kinetics of Particleschethugowda7No ratings yet
- Week 11 - TorsionDocument44 pagesWeek 11 - TorsionRichie BobbyNo ratings yet
- O level Physics Questions And Answer Practice Papers 2From EverandO level Physics Questions And Answer Practice Papers 2Rating: 5 out of 5 stars5/5 (1)
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- Ship Magnetism and the Magnetic Compass: The Commonwealth and International Library of Science, Technology, Engineering and Liberal Studies: Navigation and Nautical CoursesFrom EverandShip Magnetism and the Magnetic Compass: The Commonwealth and International Library of Science, Technology, Engineering and Liberal Studies: Navigation and Nautical CoursesRating: 5 out of 5 stars5/5 (3)
- © Boardworks LTD 2007 1 of 50Document50 pages© Boardworks LTD 2007 1 of 50Ana100% (1)
- English Week 6Document11 pagesEnglish Week 6Ralph Bryan HidalgoNo ratings yet
- English 5 Week 7-8Document12 pagesEnglish 5 Week 7-8Ralph Bryan HidalgoNo ratings yet
- Context CluesDocument16 pagesContext CluesRalph Bryan HidalgoNo ratings yet
- Long Quiz in English 5Document21 pagesLong Quiz in English 5Ralph Bryan HidalgoNo ratings yet
- Partsoftheflower 160715111306Document13 pagesPartsoftheflower 160715111306Ralph Bryan HidalgoNo ratings yet
- Abhi Cyclone 191225044123Document31 pagesAbhi Cyclone 191225044123Ralph Bryan HidalgoNo ratings yet
- Ionic Compounds NKCSDDocument28 pagesIonic Compounds NKCSDRalph Bryan HidalgoNo ratings yet
- Ionic Compounds NKCSDDocument28 pagesIonic Compounds NKCSDRalph Bryan HidalgoNo ratings yet
- Layers of The EarthDocument14 pagesLayers of The EarthRalph Bryan HidalgoNo ratings yet
- Detailed Lesson Plan in Science 6Document4 pagesDetailed Lesson Plan in Science 6Ralph Bryan Hidalgo100% (1)
- Open Ended Lab (Group 2) Final FileDocument15 pagesOpen Ended Lab (Group 2) Final Filealinadeem2181No ratings yet
- ESP1111 Week-8 Convection 2022Document21 pagesESP1111 Week-8 Convection 2022Milim NavaNo ratings yet
- 132 KV SubstationDocument18 pages132 KV Substationraju chandanshiveNo ratings yet
- Physics-XII Chapter - 12 (Electric Flux and Electric Potential) Practice Sheet-02Document5 pagesPhysics-XII Chapter - 12 (Electric Flux and Electric Potential) Practice Sheet-02Ghulam NabiNo ratings yet
- Jdcortor - Actividad 4 Análisis de Circuitos en ACDocument10 pagesJdcortor - Actividad 4 Análisis de Circuitos en ACalejandra pineda0% (1)
- Copie de ABB ACS600 Parameter ListDocument241 pagesCopie de ABB ACS600 Parameter ListSerigne Saliou GayeNo ratings yet
- Physics106 Lecture02Document28 pagesPhysics106 Lecture02Popo MegaNo ratings yet
- Chapter 8 POWER FLOW THROUGHT INTERCONNECTORSDocument19 pagesChapter 8 POWER FLOW THROUGHT INTERCONNECTORSSampi LuminaNo ratings yet
- Mme Electrial FRQ Questions OnlyDocument76 pagesMme Electrial FRQ Questions OnlyKHALIDNo ratings yet
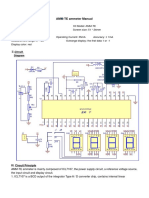
- AMM-TE Ammeter Manual: I. Kit DetailsDocument13 pagesAMM-TE Ammeter Manual: I. Kit DetailsGabriel LatiuNo ratings yet
- Ebook Chemical Principles 7Th Edition Zumdahl Test Bank Full Chapter PDFDocument44 pagesEbook Chemical Principles 7Th Edition Zumdahl Test Bank Full Chapter PDFJaniceMarqueznxed100% (11)
- Tme 213 Classwork SolutionsDocument15 pagesTme 213 Classwork SolutionsEnenamahNo ratings yet
- 2.1.b MOTIONDocument8 pages2.1.b MOTIONduru selNo ratings yet
- Matlab For Engineers 5th Edition Moore Solutions ManualDocument18 pagesMatlab For Engineers 5th Edition Moore Solutions Manualschahheelpost4ogl100% (22)
- XIth PhysicsDocument48 pagesXIth PhysicsTanishq GangatkarNo ratings yet
- HydrostaticsDocument24 pagesHydrostaticsmaria ashrafNo ratings yet
- Taller 1 Mecanica de SolidosDocument8 pagesTaller 1 Mecanica de SolidosAleha RiveraNo ratings yet
- 5.1. The Effect of Temperature On Membrane Permeability: PlanningDocument6 pages5.1. The Effect of Temperature On Membrane Permeability: PlanningHabib UddinNo ratings yet
- Nominal Performance: Principal Dimensions - MMDocument1 pageNominal Performance: Principal Dimensions - MMUlil Amri100% (2)
- CH6 Manual XModdzDocument3 pagesCH6 Manual XModdzrobertoNo ratings yet
- OWON B41T Digital Multimeter With Bluetooth Technical Spec.sDocument2 pagesOWON B41T Digital Multimeter With Bluetooth Technical Spec.speladillanetNo ratings yet
- Certificate of Quality: Gas OilDocument1 pageCertificate of Quality: Gas OilJordan ThomasNo ratings yet
- INPhO 2008 - 2020 Indian National Physics OlympiadDocument362 pagesINPhO 2008 - 2020 Indian National Physics OlympiadSubhankar TripathiNo ratings yet
- Thermodynamic Air Standard CycleDocument34 pagesThermodynamic Air Standard CycleMahadi HasanNo ratings yet
- Notes Till Lec-8 - 23135071Document80 pagesNotes Till Lec-8 - 23135071pranjal02svpslNo ratings yet
- On Site Testing and PD Diagnosis of HighDocument10 pagesOn Site Testing and PD Diagnosis of Highnamsaigon316No ratings yet
- Power Plant Review Lecture: By: Engr. Jermhel M. Solis, Ree, RmeDocument14 pagesPower Plant Review Lecture: By: Engr. Jermhel M. Solis, Ree, RmeAt Sa Wakas AyNo ratings yet
- ADR01!02!03-06 10.0 V5.0 V2.5 V3.0 V Precision Voltage ReferencesDocument20 pagesADR01!02!03-06 10.0 V5.0 V2.5 V3.0 V Precision Voltage ReferencesjavierNo ratings yet
- Work Book Physics Grade 11&12Document33 pagesWork Book Physics Grade 11&12Yonatan Tolosa100% (2)
- Class 12 Experiment 1Document4 pagesClass 12 Experiment 1Mrinal SolankiNo ratings yet