You might also like
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Intro to SoCDocument81 pagesIntro to SoCryujindanceNo ratings yet
- Fujitsu ARM Cortex Design SupportDocument2 pagesFujitsu ARM Cortex Design SupportFujitsu Semiconductor EuropeNo ratings yet
- Designing With Nios II and SOPC BuilderDocument202 pagesDesigning With Nios II and SOPC Builderalijanavar100% (2)
- Cs295: Modern Systems What Are Fpgas and Why Should You CareDocument22 pagesCs295: Modern Systems What Are Fpgas and Why Should You CareGiovanni OrsariNo ratings yet
- Cisco ASR1001 Router SpecificationsDocument6 pagesCisco ASR1001 Router SpecificationskjlopezpNo ratings yet
- C132-04 3U cPCI BladesDocument12 pagesC132-04 3U cPCI BladesMahesh KumbharNo ratings yet
- Fpga Timeline & Applications: Fpgas Past, Present & FutureDocument39 pagesFpga Timeline & Applications: Fpgas Past, Present & FuturesmsarmadNo ratings yet
- Embedded Processor: Unit IIDocument50 pagesEmbedded Processor: Unit IIsupriyaNo ratings yet
- User' User' User' User' User'sssss Manual Manual Manual Manual ManualDocument86 pagesUser' User' User' User' User'sssss Manual Manual Manual Manual Manualti08077762No ratings yet
- Marvell Embedded Processors Armada 37xx Hardware Specifications 2019 09Document155 pagesMarvell Embedded Processors Armada 37xx Hardware Specifications 2019 09Wu WeNo ratings yet
- Accelerate With ATS: SVC DH8 and V7.3 Code Updates: Byron Grossnickle N.A. Storage Specialty TeamDocument52 pagesAccelerate With ATS: SVC DH8 and V7.3 Code Updates: Byron Grossnickle N.A. Storage Specialty TeamSreenath GootyNo ratings yet
- ARM Cortex A Processors SurveyDocument20 pagesARM Cortex A Processors SurveyivanmeyerNo ratings yet
- gigaSOM gS01 v2 (Intel 2022) PDFDocument1 pagegigaSOM gS01 v2 (Intel 2022) PDFyahia elshakhsNo ratings yet
- Adapilot Public-Pres 2016Document28 pagesAdapilot Public-Pres 2016Alex CNo ratings yet
- FPGA Architecture and ImplementationDocument59 pagesFPGA Architecture and ImplementationManas BhattNo ratings yet
- Apple M1 Chip Guide: Microarchitecture, Performance and SecurityDocument24 pagesApple M1 Chip Guide: Microarchitecture, Performance and SecurityVesko IlijaziNo ratings yet
- FPGA Technology: Carl LebsackDocument27 pagesFPGA Technology: Carl LebsackShrikant ChamlateNo ratings yet
- Optimizing Your Automotive System With Jacinto™ 7 Socs and Mcu IntegrationDocument18 pagesOptimizing Your Automotive System With Jacinto™ 7 Socs and Mcu IntegrationMarco GesslerNo ratings yet
- CP6004-SA-carte ÉlectroniqueDocument4 pagesCP6004-SA-carte Électroniquejess huréNo ratings yet
- High-Performance Dual Core CPU System On Chip Technical Product BriefDocument2 pagesHigh-Performance Dual Core CPU System On Chip Technical Product BriefЕвгений БабичNo ratings yet
- Choosing the Right Processor for Embedded System DesignDocument45 pagesChoosing the Right Processor for Embedded System DesignINTTICNo ratings yet
- LEON3 SPARC Processor, The Past Present and FutureDocument41 pagesLEON3 SPARC Processor, The Past Present and FutureBonnie ThompsonNo ratings yet
- Cisco ASR1001X-20G-K9 Router DatasheetDocument5 pagesCisco ASR1001X-20G-K9 Router DatasheetCV Bali Info DataNo ratings yet
- Smart Enterprise Communications UpgradeDocument117 pagesSmart Enterprise Communications UpgradeJavi Katz100% (1)
- Arm-Cortex m3Document13 pagesArm-Cortex m3vinjamurisivaNo ratings yet
- CortexM1 PBDocument12 pagesCortexM1 PBYasin ŞahinNo ratings yet
- Introducción Al Diseño de Soc (Systems On Chip) Manuel J. Bellido Díaz Febrero de 2016Document20 pagesIntroducción Al Diseño de Soc (Systems On Chip) Manuel J. Bellido Díaz Febrero de 2016lapatatanegraNo ratings yet
- HPE ProLiant DL380 Gen10 ServerDocument3 pagesHPE ProLiant DL380 Gen10 ServerammelinoNo ratings yet
- Embedded Processor: Unit IIDocument50 pagesEmbedded Processor: Unit IIgudduNo ratings yet
- HDM Fpga AsicDocument157 pagesHDM Fpga AsicDeepika KumariNo ratings yet
- ESD -DAY 2-PortalDocument35 pagesESD -DAY 2-PortaldraqulaincNo ratings yet
- ARM Architecture: Computer Organization and Assembly Languages P GZ y GG Yung-Yu ChuangDocument26 pagesARM Architecture: Computer Organization and Assembly Languages P GZ y GG Yung-Yu ChuangFarheenNo ratings yet
- TCW BookDocument45 pagesTCW Bookمسعود المغيريNo ratings yet
- Marvell 88F37xx Product Brief 20160830Document2 pagesMarvell 88F37xx Product Brief 20160830Sassy FiverNo ratings yet
- 1Document3 pages1grufNo ratings yet
- GEN Series GEN4tB: Transient Recorder and Data Acquisition SystemDocument50 pagesGEN Series GEN4tB: Transient Recorder and Data Acquisition SystemCrispy BndNo ratings yet
- DIN Rail Industrial Computer - Arrakis-pico-MK3 SeriesDocument5 pagesDIN Rail Industrial Computer - Arrakis-pico-MK3 SeriesPham HoaNo ratings yet
- APG43 InternalWorkshop CSIDocument56 pagesAPG43 InternalWorkshop CSIyacine bouazniNo ratings yet
- Thinkstation p310 Tower SpecificationsDocument1 pageThinkstation p310 Tower SpecificationsDavid CastellanosNo ratings yet
- ARM Processor: Chapter 1: ARM Embedded SystemsDocument25 pagesARM Processor: Chapter 1: ARM Embedded SystemsveenadivyakishNo ratings yet
- ARM Cortex-A Series Processors: Haoyang Lu, Zheng Lu, Yong Li, James CorteseDocument15 pagesARM Cortex-A Series Processors: Haoyang Lu, Zheng Lu, Yong Li, James CorteseNagesh SamaneNo ratings yet
- Ch3 Advanced Hardware Fundamentals LectureDocument24 pagesCh3 Advanced Hardware Fundamentals Lectureapi-3838221100% (1)
- Using_TerminalsDocument19 pagesUsing_TerminalscointoinNo ratings yet
- ARM Arch 1704437782Document26 pagesARM Arch 1704437782PrasanthKumarNpkNo ratings yet
- ARM Architecture: Computer Organization and Assembly Languages P GZ y GG Yung-Yu ChuangDocument26 pagesARM Architecture: Computer Organization and Assembly Languages P GZ y GG Yung-Yu ChuangTwinkle RatnaNo ratings yet
- BRKCRS 3143Document105 pagesBRKCRS 3143prakashrjsekarNo ratings yet
- Unit 4 Introduction To ARM CORTEX M4Document84 pagesUnit 4 Introduction To ARM CORTEX M4chetansawant8112003No ratings yet
- Lecture 05 ARM ProcessorsDocument65 pagesLecture 05 ARM ProcessorsNguyễn Tấn ĐịnhNo ratings yet
- Mio-5377r DS (100223) 20231002134454Document2 pagesMio-5377r DS (100223) 20231002134454wogoki8806No ratings yet
- Arm Cpu CoresDocument78 pagesArm Cpu CoresRAMACHANDRA KHOTNo ratings yet
- AMD Seminar Summit Ridge AM4 - For CustomersDocument57 pagesAMD Seminar Summit Ridge AM4 - For CustomersFamily LinNo ratings yet
- Micro Controller M 8051Document95 pagesMicro Controller M 8051Jyothish A GhoshNo ratings yet
- 8255Document4 pages8255shrusuprNo ratings yet
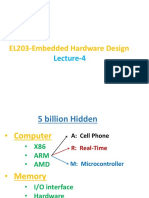
- EL203 Lec4Document16 pagesEL203 Lec4D StarNo ratings yet
- Arria 10 Soc Som R2.0 1771113Document3 pagesArria 10 Soc Som R2.0 1771113yahia elshakhsNo ratings yet
- CPUs GPUs AcceleratorsDocument22 pagesCPUs GPUs AcceleratorsKevin William DanielsNo ratings yet
- VYBRIDFSERIESECDocument122 pagesVYBRIDFSERIESECLuisNo ratings yet
- FPGA-TN-02136-1-8-LatticeECP3-SPI-Slave-PortDocument22 pagesFPGA-TN-02136-1-8-LatticeECP3-SPI-Slave-PortATHIRA G SNo ratings yet
- Classification of Embedded Systems Three Types of Embedded Systems AreDocument24 pagesClassification of Embedded Systems Three Types of Embedded Systems Arekartika_krazeNo ratings yet
- Macallan Active Active With Doppler DG Case StudyDocument37 pagesMacallan Active Active With Doppler DG Case StudySuresh JakkaNo ratings yet
- Virtual Private Networks: Progress and Challenges Panel SessionDocument21 pagesVirtual Private Networks: Progress and Challenges Panel SessionSuresh JakkaNo ratings yet
- Freshly Brewed Tea & Filter Coffee Vending MachineDocument7 pagesFreshly Brewed Tea & Filter Coffee Vending MachineSuresh JakkaNo ratings yet
- Godrej Vending Kiosk PresentationDocument3 pagesGodrej Vending Kiosk PresentationSuresh JakkaNo ratings yet
- Godrej Vending BrochureDocument6 pagesGodrej Vending BrochureSuresh JakkaNo ratings yet
- Osy Chapter 3Document19 pagesOsy Chapter 3NNo ratings yet
- Myon Parent GuideDocument13 pagesMyon Parent Guideapi-527646442No ratings yet
- 1019-Article Text-6238-1-10-20230525Document6 pages1019-Article Text-6238-1-10-20230525Keyara PutriNo ratings yet
- Plantilla Powerpoint QuimicaDocument22 pagesPlantilla Powerpoint QuimicaMayra HernandezNo ratings yet
- Jadenlimkaijie w1Document4 pagesJadenlimkaijie w1api-518329636No ratings yet
- Progress Test 02Document21 pagesProgress Test 02andrewlaurenNo ratings yet
- TSA Power Amp ManualDocument52 pagesTSA Power Amp ManualGiovanni CatalaniNo ratings yet
- Arduino Smart Home With Alexa Google Assistant UsiDocument32 pagesArduino Smart Home With Alexa Google Assistant UsiMihaiNo ratings yet
- UntitledDocument880 pagesUntitledmahdi beheshti100% (1)
- 2122 Mast M-Tech A2 Hoe Emship enDocument22 pages2122 Mast M-Tech A2 Hoe Emship enMohamed BoutmezoughetNo ratings yet
- Lecture3-1 OSSS TreesDocument39 pagesLecture3-1 OSSS Treesahmezo100% (1)
- Smart HelmetDocument11 pagesSmart HelmetsarangNo ratings yet
- Acquiring Host-Based EvidenceDocument21 pagesAcquiring Host-Based EvidencejigyanshuNo ratings yet
- NCLT Convened Meeting NoticeDocument36 pagesNCLT Convened Meeting NoticeAkash SinghNo ratings yet
- Megahertz Internet Network Pvt. LTD.: Retail InvoiceDocument1 pageMegahertz Internet Network Pvt. LTD.: Retail InvoiceAyush ThapliyalNo ratings yet
- User Guide For Speedlink: Hearing Instrument Programming InterfaceDocument26 pagesUser Guide For Speedlink: Hearing Instrument Programming InterfaceMarcio Lobo SelvagemNo ratings yet
- Unit 1Document112 pagesUnit 1gemerb505No ratings yet
- Seminar: Predictive AnalyticsDocument10 pagesSeminar: Predictive Analyticssamiksha ingoleNo ratings yet
- Project SynopsisDocument3 pagesProject SynopsisRuchith RameshNo ratings yet
- 6G7V0028-1CWK100-Principles-Practices-Cyber Security-ASSIGNMENT-Description-2023-2024-UpdateDocument9 pages6G7V0028-1CWK100-Principles-Practices-Cyber Security-ASSIGNMENT-Description-2023-2024-UpdateMayukh SahaNo ratings yet
- Employee Payroll System ProjectDocument21 pagesEmployee Payroll System ProjectZeeshan Hyder BhattiNo ratings yet
- Quantifying The Seasonal Cooling Capacity of Green Infrastr 2020 LandscapeDocument21 pagesQuantifying The Seasonal Cooling Capacity of Green Infrastr 2020 Landscape熙槃No ratings yet
- Data Mining 1-3Document29 pagesData Mining 1-3Singer JerowNo ratings yet
- Standard Operating Procedure For Customer CreationDocument3 pagesStandard Operating Procedure For Customer CreationMRL AccountsNo ratings yet
- Week 4 INFS6018 - S1 2023 - WorkshopDocument16 pagesWeek 4 INFS6018 - S1 2023 - Workshop496068808No ratings yet
- Transforming Education in The Digital AgeDocument4 pagesTransforming Education in The Digital AgeAnalyn AgotoNo ratings yet
- HEC HMS - User's - Manual v4.11 20231018Document1,039 pagesHEC HMS - User's - Manual v4.11 20231018carmona.eitNo ratings yet
- Study On Electricity Distribution Substation Operation Amp Maintenance of DescoDocument46 pagesStudy On Electricity Distribution Substation Operation Amp Maintenance of DescoJayant KoshtiNo ratings yet
- Good To Great by Jim CollinsDocument6 pagesGood To Great by Jim Collinsbubasyla33% (6)
- Stand Out of Our LightDocument152 pagesStand Out of Our LightValentina CastrillónNo ratings yet