You might also like
- 直升机飞行控制器设计与仿真Document4 pages直升机飞行控制器设计与仿真king kingNo ratings yet
- 對弈機器人Document35 pages對弈機器人billion gNo ratings yet
- 2 1机器人基础编程设置和规范-轨迹调试基础培训Document13 pages2 1机器人基础编程设置和规范-轨迹调试基础培训hello233No ratings yet
- 逢甲自控系 - 小民航機飛行姿庇在動感平台上之模擬與驗證Document52 pages逢甲自控系 - 小民航機飛行姿庇在動感平台上之模擬與驗證常慚愧No ratings yet
- 機器人簡介期末書面報告 - Google 文件Document15 pages機器人簡介期末書面報告 - Google 文件李尚倫No ratings yet
- 基于SimMechanics的六自由度机械臂仿真研究Document8 pages基于SimMechanics的六自由度机械臂仿真研究高小辉No ratings yet
- Euler Angle and Coordinate TransformationDocument3 pagesEuler Angle and Coordinate TransformationChunhui WangNo ratings yet
- 生成与查询螺旋矩阵的在线算法研究Document10 pages生成与查询螺旋矩阵的在线算法研究PengHYNo ratings yet
- 轮式牵引机器人优化设计及运动特性分析 吴伟Document9 pages轮式牵引机器人优化设计及运动特性分析 吴伟dragonkingwhdNo ratings yet
- 两轮自平衡小车建模及LQR控制算法设计 龙周Document6 pages两轮自平衡小车建模及LQR控制算法设计 龙周pptzztppNo ratings yet
- Report For AssignmentDocument11 pagesReport For AssignmentThanh Pham TuanNo ratings yet
- 時間序列實驗分析指南Document62 pages時間序列實驗分析指南euler96100% (1)
- Prediction of Fixturing Errors and Tilted Working Plane Compensation For Five-Axis CNC Machine ToolsDocument7 pagesPrediction of Fixturing Errors and Tilted Working Plane Compensation For Five-Axis CNC Machine ToolsdiaboloboyNo ratings yet
- 課程:節省人力、提升效率的製程自動化 & 機器人控制器mrc01解決提案Document60 pages課程:節省人力、提升效率的製程自動化 & 機器人控制器mrc01解決提案check.chang3No ratings yet
- 實際操作四軸機械手臂並且定位位置計算 PDFDocument1 page實際操作四軸機械手臂並且定位位置計算 PDFCheng Yu WangNo ratings yet
- 碩士論文 關節式機械手臂動態模型建構與運動控制Document66 pages碩士論文 關節式機械手臂動態模型建構與運動控制billion gNo ratings yet
- (2009-04-05) 史都華平台原理與定位方式Document16 pages(2009-04-05) 史都華平台原理與定位方式Cheng Yu WangNo ratings yet
- U3d Fundamental 03Document53 pagesU3d Fundamental 03iimsheungNo ratings yet
- 第3章 平面连杆机构Document64 pages第3章 平面连杆机构Humphrey ApplebyNo ratings yet
- 曲柄摇杆扑翼机构的联合仿真及优化设计Document4 pages曲柄摇杆扑翼机构的联合仿真及优化设计DENNIS songNo ratings yet
- 草莓采摘机器人毕业论文答辩Document22 pages草莓采摘机器人毕业论文答辩kitaNo ratings yet
- 对弈程序基本技术Document102 pages对弈程序基本技术ipsoundNo ratings yet
- 1 文稿Document44 pages1 文稿Yuanren XuNo ratings yet
- 垃圾處理機甲Document20 pages垃圾處理機甲05傅煒竣No ratings yet
- Ch12345Homework 20210219xgDocument5 pagesCh12345Homework 20210219xgAmyNo ratings yet
- OpenSEES EXAMPLE 34Document7 pagesOpenSEES EXAMPLE 34dino chenNo ratings yet
- 1 直流馬達實驗Document16 pages1 直流馬達實驗梁智翔No ratings yet
- AUV发动机的ADAMS MATLAB联合仿真研究Document6 pagesAUV发动机的ADAMS MATLAB联合仿真研究DENNIS songNo ratings yet
- 三自由度摇摆台姿态逆解及ADAMS仿真Document4 pages三自由度摇摆台姿态逆解及ADAMS仿真DENNIS songNo ratings yet
- 基于模型预测控制的直线倒立... LAB和ADAMS仿真研究 石惠文Document5 pages基于模型预测控制的直线倒立... LAB和ADAMS仿真研究 石惠文dragonkingwhdNo ratings yet
- 基于虚拟样机技术的某车辆性能仿真研究Document5 pages基于虚拟样机技术的某车辆性能仿真研究DENNIS songNo ratings yet
- 基于SARSA算法的机器人轴孔装配策略 李少东Document16 pages基于SARSA算法的机器人轴孔装配策略 李少东haungqi1023No ratings yet
- 航空发动机转子系统的动态响应计算 张欢Document8 pages航空发动机转子系统的动态响应计算 张欢Kai SunNo ratings yet
- 基于Automation Studio铲运机转向液压系统设计Document7 pages基于Automation Studio铲运机转向液压系统设计jackNo ratings yet
- 无人机:飞行器入门理论知识pdfDocument13 pages无人机:飞行器入门理论知识pdfxr ChristopherNo ratings yet
- 馬達定位與轉速控制最終版Document6 pages馬達定位與轉速控制最終版R dokanNo ratings yet
- 3Document20 pages3mingNo ratings yet
- F 1254192402310Document56 pagesF 1254192402310Anonymous 9q5GEfm8INo ratings yet
- 倒立摆状态反馈极点配置与LQR控制Matlab实现 刘文秀Document3 pages倒立摆状态反馈极点配置与LQR控制Matlab实现 刘文秀金依菲No ratings yet
- 单变量微积分 - 马同学 - - Anna's ArchiveDocument777 pages单变量微积分 - 马同学 - - Anna's Archive0919aprilNo ratings yet
- 基于ADAMS变结构堵渣机的仿真分析与优化Document6 pages基于ADAMS变结构堵渣机的仿真分析与优化DENNIS songNo ratings yet
- 飞行器气动设计实践报告Document26 pages飞行器气动设计实践报告杨跃波No ratings yet
- 機 動 學 講 義 1 PDFDocument231 pages機 動 學 講 義 1 PDF陳力群0% (1)
- 混联仿生机器狗构型研究 姜铭Document6 pages混联仿生机器狗构型研究 姜铭mar3021001607No ratings yet
- 基于FMECA的数控转台可靠性分析Document7 pages基于FMECA的数控转台可靠性分析dlg20180722No ratings yet
- 航空发动机平衡工艺技术的发展Document5 pages航空发动机平衡工艺技术的发展backfire0No ratings yet
- 汽车线束检测系统的设计与实现Document3 pages汽车线束检测系统的设计与实现Bau2NineNo ratings yet
- CREO经典阵列实例解析 (高级篇)Document43 pagesCREO经典阵列实例解析 (高级篇)王振华No ratings yet
- 第2章机器人机构Document26 pages第2章机器人机构Yang yang YNo ratings yet
- 123 Acdc FDDDocument8 pages123 Acdc FDD林宇宣No ratings yet
- Analytical Formulae of Secondary Vertical Suspension System Design For Highspeed Trainjixie Gongcheng XuebaoJournal of Mechanical EngineeringDocument8 pagesAnalytical Formulae of Secondary Vertical Suspension System Design For Highspeed Trainjixie Gongcheng XuebaoJournal of Mechanical Engineeringfattah maulanaNo ratings yet
- 翻譯Document17 pages翻譯吳昀恬No ratings yet
- 0-ch07 邏輯與計算機設計 (20211224)Document112 pages0-ch07 邏輯與計算機設計 (20211224)劉千榮No ratings yet
- a.机械原理1DT machine theory 1920 1st termDocument7 pagesa.机械原理1DT machine theory 1920 1st term潘卫平No ratings yet
- 資料與數值分析Document31 pages資料與數值分析STM WorksNo ratings yet
- SampleTask PHY C 1121Document11 pagesSampleTask PHY C 1121David KwongNo ratings yet
- patran常见问题与技巧锦集Document21 pagespatran常见问题与技巧锦集scoymNo ratings yet
- 基于ADAMS的并联机器人振动特性仿真及结构优化Document5 pages基于ADAMS的并联机器人振动特性仿真及结构优化DENNIS songNo ratings yet
- 02小学语文测验的分类与题型Document11 pages02小学语文测验的分类与题型MingYuanNo ratings yet
- 论赖声川《暗恋桃花源》对传统戏剧的突破 PDFDocument5 pages论赖声川《暗恋桃花源》对传统戏剧的突破 PDFCee ZhiNo ratings yet
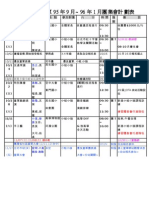
- 幼童軍團 95年9月~96年1月團集會計劃表更改過951002Document2 pages幼童軍團 95年9月~96年1月團集會計劃表更改過951002api-3750089No ratings yet
- 第三週期大學校院校務評鑑實施計畫Document56 pages第三週期大學校院校務評鑑實施計畫王志豐No ratings yet
- DC590Document2 pagesDC590Mod HibridNo ratings yet