You might also like
- Deep Learning with Python: A Comprehensive Guide to Deep Learning with PythonFrom EverandDeep Learning with Python: A Comprehensive Guide to Deep Learning with PythonNo ratings yet
- Deep Learning On Modern CpusDocument11 pagesDeep Learning On Modern CpusGary Ryan DonovanNo ratings yet
- DFANet Deep Feature Aggregation For Real-Time Semantic SegmentationDocument10 pagesDFANet Deep Feature Aggregation For Real-Time Semantic Segmentationprajna acharyaNo ratings yet
- Laius: An 8-Bit Fixed-Point CNN Hardware Inference EngineDocument8 pagesLaius: An 8-Bit Fixed-Point CNN Hardware Inference EngineREAL GyanNo ratings yet
- Graph Convolutional Networks Adaptations and ApplicationsDocument6 pagesGraph Convolutional Networks Adaptations and ApplicationsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design of Fpga Based General Purpose Neural Network: MR Prashant D.Deotaleproflalit DoleDocument5 pagesDesign of Fpga Based General Purpose Neural Network: MR Prashant D.Deotaleproflalit DolePurohit Manish RNo ratings yet
- LinkNet - Exploiting Encoder Representations For Efficient Semantic SegmentationDocument5 pagesLinkNet - Exploiting Encoder Representations For Efficient Semantic SegmentationMario Galindo QueraltNo ratings yet
- Wang CSPNet A New Backbone That Can Enhance Learning Capability of CVPRW 2020 PaperDocument10 pagesWang CSPNet A New Backbone That Can Enhance Learning Capability of CVPRW 2020 PaperSerxio GarcíaNo ratings yet
- 3 ENetDocument10 pages3 ENetAnandNo ratings yet
- Guest-Lecture - NN ArchitecturesDocument64 pagesGuest-Lecture - NN Architecturessk1029No ratings yet
- A Real-Time Object Detection Processor With Xnor-BDocument13 pagesA Real-Time Object Detection Processor With Xnor-BcattiewpieNo ratings yet
- Constrained Design of Deep Iris NetworksDocument10 pagesConstrained Design of Deep Iris NetworkssheelaNo ratings yet
- Handwritten Letter Recognition Using Artificial Intelligence'Document9 pagesHandwritten Letter Recognition Using Artificial Intelligence'IJRASETPublicationsNo ratings yet
- Accelerated Deep Learning Inference From Constrained Embedded DevicesDocument5 pagesAccelerated Deep Learning Inference From Constrained Embedded DevicesBhargav BhatNo ratings yet
- Efficient Parallel Sort On AVX-512-based Multi-Core and Many-Core ArchitecturesDocument9 pagesEfficient Parallel Sort On AVX-512-based Multi-Core and Many-Core Architecturesangki_angNo ratings yet
- A High-Throughput and Power-Efficient FPGA Implementation of Yolo CNN For Object DetectionDocument13 pagesA High-Throughput and Power-Efficient FPGA Implementation of Yolo CNN For Object DetectionVinh Lê HữuNo ratings yet
- Design and Implementation of Convolutional Neural Network Accelerator Based On RISCVDocument6 pagesDesign and Implementation of Convolutional Neural Network Accelerator Based On RISCVmadupiz@gmailNo ratings yet
- A High-Throughput and Power-Efficient FPGA Implementation of YOLO CNN For Object DetectionDocument13 pagesA High-Throughput and Power-Efficient FPGA Implementation of YOLO CNN For Object DetectionullagalluNo ratings yet
- Practical Block-Wise Neural Network Architecture GenerationDocument11 pagesPractical Block-Wise Neural Network Architecture Generationrx zhongNo ratings yet
- 6 SegnetDocument14 pages6 SegnetSUMOD SUNDARNo ratings yet
- Gap Method For Keyword Spotting: Varsha Thakur, HimanisikarwarDocument7 pagesGap Method For Keyword Spotting: Varsha Thakur, HimanisikarwarSunil ChaluvaiahNo ratings yet
- Scaled-Yolov4: Scaling Cross Stage Partial Network: June 2021Document11 pagesScaled-Yolov4: Scaling Cross Stage Partial Network: June 2021Debayan DuttaNo ratings yet
- Parallel Efficient Sparse Matrix-Matrix Multiplication On Multicore PlatformsDocument11 pagesParallel Efficient Sparse Matrix-Matrix Multiplication On Multicore PlatformsSatya Gautam VadlamudiNo ratings yet
- 5 Days InetrnshipDocument48 pages5 Days InetrnshipsowmiNo ratings yet
- FEECA Design Space Exploration For Low-Latency and Energy-Efficient Capsule Network AcceleratorsDocument14 pagesFEECA Design Space Exploration For Low-Latency and Energy-Efficient Capsule Network Acceleratorsroopa_kothapalliNo ratings yet
- High Performance FPGA Based CNN AcceleratorDocument4 pagesHigh Performance FPGA Based CNN AcceleratorInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Graph Placement Methodology 2021Document24 pagesA Graph Placement Methodology 2021Eric WangNo ratings yet
- CNN Case Studies Unit 4Document13 pagesCNN Case Studies Unit 4Anushka JanotiNo ratings yet
- FFSN Inplementation4Document18 pagesFFSN Inplementation4Andi DwikiNo ratings yet
- Post-Reading Report Alex Shen (Mid Exam)Document36 pagesPost-Reading Report Alex Shen (Mid Exam)Alex ShenNo ratings yet
- Data Science Interview Preparation (30 Days of Interview Preparation)Document15 pagesData Science Interview Preparation (30 Days of Interview Preparation)qtdaivuongNo ratings yet
- 2021 MirhoseiniDocument23 pages2021 MirhoseiniLiat BarNo ratings yet
- Imagify Reconstruction of High - Resolution Images From Degraded ImagesDocument5 pagesImagify Reconstruction of High - Resolution Images From Degraded ImagesIJRASETPublicationsNo ratings yet
- Sum Product PaperDocument10 pagesSum Product PaperpeoriditoNo ratings yet
- Custom Integrated Circuit Design Using Open-Source ToolsDocument1 pageCustom Integrated Circuit Design Using Open-Source ToolsComplex Systems Modeling and EngineeringNo ratings yet
- Structured Pruning of Deep Convolutional Neural Netw Orks: Sajid Anwar, Kyuyeon Hwang and Wonyong SungDocument11 pagesStructured Pruning of Deep Convolutional Neural Netw Orks: Sajid Anwar, Kyuyeon Hwang and Wonyong Sungali shaarawyNo ratings yet
- LightNets The Concept of Weakening LayersDocument7 pagesLightNets The Concept of Weakening LayersDaniel Muharom A SNo ratings yet
- ETH: A Framework For The Design-Space Exploration of Extreme-Scale Scientific VisualizationDocument10 pagesETH: A Framework For The Design-Space Exploration of Extreme-Scale Scientific VisualizationcjchienNo ratings yet
- JTECCNNDocument6 pagesJTECCNN윤희지No ratings yet
- A Survey of Network-On-Chip Tools: Ahmed Ben Achballah Slim Ben SaoudDocument7 pagesA Survey of Network-On-Chip Tools: Ahmed Ben Achballah Slim Ben Saoudkamarajme2006No ratings yet
- An Efficient Hardware Accelerator For Structured Sparse Convolutional Neural Networks On FpgasDocument12 pagesAn Efficient Hardware Accelerator For Structured Sparse Convolutional Neural Networks On FpgasSelva KumarNo ratings yet
- Learning Robust Feature Representations For Scene Text DetectionDocument10 pagesLearning Robust Feature Representations For Scene Text DetectionMinh Đinh NhậtNo ratings yet
- An Efficient CNN Accelerator Using Inter-Frame Data Reuse of Videos On FPGAsDocument14 pagesAn Efficient CNN Accelerator Using Inter-Frame Data Reuse of Videos On FPGAspalansamyNo ratings yet
- EMBA: Efficient Memory Bandwidth Allocation To Improve Performance On Intel Commodity ProcessorDocument12 pagesEMBA: Efficient Memory Bandwidth Allocation To Improve Performance On Intel Commodity ProcessorSHREYANo ratings yet
- Programmable Neuromorphic Circuit Based On Printed Electrolyte-Gated TransistorsDocument6 pagesProgrammable Neuromorphic Circuit Based On Printed Electrolyte-Gated Transistorskamru55l.malNo ratings yet
- Feng Liang Et Al - 2021 - Efficient Neural Network Using Pointwise Convolution Kernels With Linear PhaseDocument8 pagesFeng Liang Et Al - 2021 - Efficient Neural Network Using Pointwise Convolution Kernels With Linear Phasebigliang98No ratings yet
- CSPN: A N B E L C CNN: ET EW Ackbone That Can Nhance Earning Apability ofDocument14 pagesCSPN: A N B E L C CNN: ET EW Ackbone That Can Nhance Earning Apability ofdocjagNo ratings yet
- Real Time Object Detection Using CNNDocument5 pagesReal Time Object Detection Using CNNyevanNo ratings yet
- Deep Cascade LearningDocument11 pagesDeep Cascade Learningcoelho.alv4544No ratings yet
- A Review of 018-spl Mum Full Adder Performances FoDocument12 pagesA Review of 018-spl Mum Full Adder Performances FoShaik Abdul Salam BatchaNo ratings yet
- Isca TSPDocument14 pagesIsca TSPupdatesmockbankNo ratings yet
- Performance Modeling of Reconfigurable Distributed Systems Based On The OpenSPARC FPGA Board and The SIRC Communication FrameworkDocument7 pagesPerformance Modeling of Reconfigurable Distributed Systems Based On The OpenSPARC FPGA Board and The SIRC Communication FrameworkKevin ThomasNo ratings yet
- Bài 9 Các Kiến Trúc CNN Đơn GiảnDocument11 pagesBài 9 Các Kiến Trúc CNN Đơn GiảnTai Nguyen AnhNo ratings yet
- Real-Time Ssdlite Object Detection On FpgaDocument14 pagesReal-Time Ssdlite Object Detection On FpgaBhaumik ChavdaNo ratings yet
- Compression Survey HalDocument26 pagesCompression Survey HalYojith KRNo ratings yet
- An Efficient ASIC Architecture For Real-Time Edge DetectionDocument10 pagesAn Efficient ASIC Architecture For Real-Time Edge Detectionprakashjyoti0901No ratings yet
- 10 IJAEST Vol No.4 Issue No.2 High Performance System For The Interactive 054 058Document5 pages10 IJAEST Vol No.4 Issue No.2 High Performance System For The Interactive 054 058iserpNo ratings yet
- International Refereed Journal of Engineering and Science (IRJES)Document4 pagesInternational Refereed Journal of Engineering and Science (IRJES)www.irjes.comNo ratings yet
- Massively Parallel Neural Signal Processing: System-On-Chip Design With FpgasDocument4 pagesMassively Parallel Neural Signal Processing: System-On-Chip Design With FpgasAlparslan OnderNo ratings yet
- New DlauDocument52 pagesNew DlaudeepaNo ratings yet
- Bible World History Timeline - 4004-3004BCDocument1 pageBible World History Timeline - 4004-3004BCSagitonette DadapNo ratings yet
- Purpose in LifeDocument1 pagePurpose in Lifeaashish95100% (1)
- Market AnalysisDocument4 pagesMarket AnalysisSaniya CharaniyaNo ratings yet
- Murata High Voltage CeramicDocument38 pagesMurata High Voltage CeramictycristinaNo ratings yet
- 3 Tasks and ANS - Gamma Maths PDFDocument6 pages3 Tasks and ANS - Gamma Maths PDFNora ZhangNo ratings yet
- Surface TensionDocument13 pagesSurface TensionElizebeth GNo ratings yet
- Awakened Citizen Programme-Report-class VII-2014Document4 pagesAwakened Citizen Programme-Report-class VII-2014bhsgeneral r m saraswathi50% (4)
- Ali Erdemir: Professional ExperienceDocument3 pagesAli Erdemir: Professional ExperienceDunkMeNo ratings yet
- CheckList For Checking of Drawings-R1Document4 pagesCheckList For Checking of Drawings-R1jatin kalraNo ratings yet
- SSDsDocument3 pagesSSDsDiki Tri IndartaNo ratings yet
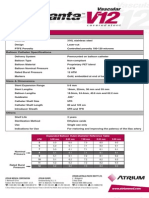
- Advanta V12 Data SheetDocument2 pagesAdvanta V12 Data SheetJuliana MiyagiNo ratings yet
- Midterm Exam Gor Grade 11Document2 pagesMidterm Exam Gor Grade 11Algelle AbrantesNo ratings yet
- Gypsum Plasterboard: National Standard of The People'S Republic of ChinaDocument15 pagesGypsum Plasterboard: National Standard of The People'S Republic of ChinaGarry100% (2)
- Straight LineDocument15 pagesStraight LineAyanNo ratings yet
- Clevo W940tu Service ManualDocument93 pagesClevo W940tu Service ManualBruno PaezNo ratings yet
- Industrial Artificial Intelligence For Industry 4.0-Based Manufacturing SystemsDocument5 pagesIndustrial Artificial Intelligence For Industry 4.0-Based Manufacturing SystemsMuhammad HaziqNo ratings yet
- IV. Network Modeling, Simple SystemDocument16 pagesIV. Network Modeling, Simple SystemJaya BayuNo ratings yet
- American BreakfastDocument4 pagesAmerican BreakfastHamilton Valenzuela ChipongianNo ratings yet
- Goliath 90 v129 eDocument129 pagesGoliath 90 v129 eerkanNo ratings yet
- Managing Diabetic Foot Ulcers ReadingDocument21 pagesManaging Diabetic Foot Ulcers Readinghimanshugupta811997No ratings yet
- Dawn of Solar PV CookingDocument5 pagesDawn of Solar PV CookingAbhinav AgrawalNo ratings yet
- SDHI18 - Komparativna Analiza Primene Vodostana I Sinhronih Regulatora TurbinaDocument13 pagesSDHI18 - Komparativna Analiza Primene Vodostana I Sinhronih Regulatora TurbinaAleksandar PetkovicNo ratings yet
- Dusta ManaDocument16 pagesDusta ManamahaphalaNo ratings yet
- MarbiehistoryDocument6 pagesMarbiehistoryMarbie DalanginNo ratings yet
- Mean Variance Portfolio TheoryDocument85 pagesMean Variance Portfolio TheoryEbenezerNo ratings yet
- Combined Shear and TensionDocument16 pagesCombined Shear and TensionDAN MARK OPONDANo ratings yet
- Seminar On Solar Mobile Charger: Submitted To: Submitted byDocument16 pagesSeminar On Solar Mobile Charger: Submitted To: Submitted byAkhila GottemukkulaNo ratings yet
- Percent by VolumeDocument19 pagesPercent by VolumeSabrina LavegaNo ratings yet
- SPL Lab Report3Document49 pagesSPL Lab Report3nadif hasan purnoNo ratings yet
- WPBSA Official Rules of The Games of Snooker and Billiards 2020 PDFDocument88 pagesWPBSA Official Rules of The Games of Snooker and Billiards 2020 PDFbabuzducNo ratings yet