You might also like
- Cat C15 SDP Testing and Adjusting Manual 2 PDFDocument138 pagesCat C15 SDP Testing and Adjusting Manual 2 PDFDragan Krsmanovic100% (2)
- 9.9 - 15 HP 2006Document28 pages9.9 - 15 HP 2006fabbromauricioyahoo.com.arNo ratings yet
- Special Purpose MotorsDocument16 pagesSpecial Purpose MotorsHari ReddyNo ratings yet
- DC MotorsDocument58 pagesDC MotorsSuhanNo ratings yet
- BLDC MotorsDocument45 pagesBLDC Motorswicked_not_meNo ratings yet
- Servo Motor & D.C Motor Interfacing With Atmega32Document33 pagesServo Motor & D.C Motor Interfacing With Atmega32Yash TripathiNo ratings yet
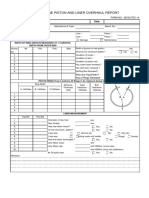
- Tec 14-Main Engine Piston and Liner Overhaul ReportDocument1 pageTec 14-Main Engine Piston and Liner Overhaul Reportwaleed yehiaNo ratings yet
- DDC SVC MAN 0074 2007.application and Instalation S60Document348 pagesDDC SVC MAN 0074 2007.application and Instalation S60Antony MorenoNo ratings yet
- Category MotorsDocument4 pagesCategory MotorsKevin CondorNo ratings yet
- 50cc (LT50 2003) Suzuki ATV Parts ListDocument27 pages50cc (LT50 2003) Suzuki ATV Parts ListMark100% (1)
- Chain Kit Codes Hero HondaDocument2 pagesChain Kit Codes Hero HondaBhusarapu Srinivas71% (17)
- CNCDocument63 pagesCNCSahil Bangia100% (1)
- of BLDCDocument45 pagesof BLDCsmhbNo ratings yet
- 2 Engine 8210Document38 pages2 Engine 8210Wanda Panggih Kurniawan100% (2)
- Operation & Maintenance Manual: P158LE, P180LE, P222LE, PU158TI, PU180TI, PU222TIDocument226 pagesOperation & Maintenance Manual: P158LE, P180LE, P222LE, PU158TI, PU180TI, PU222TIjulio cesar navaNo ratings yet
- EEE 471: BLDC Motor GuideDocument19 pagesEEE 471: BLDC Motor GuideKhalid MahmudNo ratings yet
- Kaizen - Motor Selection GuideDocument11 pagesKaizen - Motor Selection GuideAmory Sabri AsmaroNo ratings yet
- Brushless D.C. Motors: Prepared By: Manuj Garg (2k13/EE/070) Mohit Goswami (2k13/EE/073)Document17 pagesBrushless D.C. Motors: Prepared By: Manuj Garg (2k13/EE/070) Mohit Goswami (2k13/EE/073)Manuj GargNo ratings yet
- KD Engine Specs and Systems GuideDocument72 pagesKD Engine Specs and Systems Guidemoises valenzuela janampaNo ratings yet
- 19L1370124F1 PDFDocument23 pages19L1370124F1 PDFRaul Soteras EstebanNo ratings yet
- BLDCDocument25 pagesBLDCSairam Sai33% (3)
- L32-40 GenSet TierIIDocument248 pagesL32-40 GenSet TierIIM_Babiy100% (1)
- BLDC & PMDC MotorDocument29 pagesBLDC & PMDC MotorxfgngfbhsehNo ratings yet
- BLDCDocument45 pagesBLDCthulasi_krishna75% (4)
- On Brushless Motor.Document45 pagesOn Brushless Motor.KUMAR_AMIT199189% (9)
- Pulkit PPT Steam Turbine3Document42 pagesPulkit PPT Steam Turbine3Abhishek KumarNo ratings yet
- G3608 Spec SheetDocument4 pagesG3608 Spec SheetTu Pham100% (1)
- Part II - AC MotorsDocument30 pagesPart II - AC MotorsYan Liang HaoNo ratings yet
- IlDocument521 pagesIlLuis Jahuira SalasNo ratings yet
- SOLID STATE DRIVES AND BRUSHLESS MOTORSDocument11 pagesSOLID STATE DRIVES AND BRUSHLESS MOTORSramanaa mNo ratings yet
- Electric MotorsDocument30 pagesElectric MotorsAmanpreet SinghNo ratings yet
- Servo-Motor: Batch 7: Mouli R N Nagaaswin N Naveen K Nilesh Ram Praveen K Nirmal Kumar SDocument27 pagesServo-Motor: Batch 7: Mouli R N Nagaaswin N Naveen K Nilesh Ram Praveen K Nirmal Kumar SThameem AbbasNo ratings yet
- Brushless DC MotorDocument19 pagesBrushless DC MotorAnonymous M8PzfJmNo ratings yet
- Electric Motor Fundamentals: Types, Operation and ModelingDocument30 pagesElectric Motor Fundamentals: Types, Operation and Modelinggopi_905No ratings yet
- Construction and Working Principles of BLDC MotorDocument24 pagesConstruction and Working Principles of BLDC Motormahadeva prasad m sNo ratings yet
- Actuators: Department of E&E EngineeringDocument14 pagesActuators: Department of E&E Engineeringmanavi naikNo ratings yet
- Permanent Magnet Brushless DC MotorsDocument41 pagesPermanent Magnet Brushless DC MotorskingsekaranNo ratings yet
- Special Types of Machines & Microprocessor Based FunctionalDocument20 pagesSpecial Types of Machines & Microprocessor Based FunctionalSintiya TarannumNo ratings yet
- MECHATRONICS IN ROBOTICS: ELECTRICAL DRIVESDocument34 pagesMECHATRONICS IN ROBOTICS: ELECTRICAL DRIVESDeepa Ragav RNo ratings yet
- MCT 5.1Document70 pagesMCT 5.1Alfred CheriyanNo ratings yet
- EEE-UNIT 3 Machines and DrivesDocument54 pagesEEE-UNIT 3 Machines and DrivesSano ManjiroNo ratings yet
- Edc Unit - 5Document28 pagesEdc Unit - 5Gowri SNo ratings yet
- motorDocument19 pagesmotorRabi khanNo ratings yet
- Everything About BLDC MotorsDocument22 pagesEverything About BLDC MotorsNyn SoniNo ratings yet
- Actuators-Unit 1 & Sensor Unit 2Document123 pagesActuators-Unit 1 & Sensor Unit 2viren mallyaNo ratings yet
- Reluctance Motor Guide: Stator, Rotor, Principle & ApplicationsDocument10 pagesReluctance Motor Guide: Stator, Rotor, Principle & ApplicationssrmceNo ratings yet
- Electrical Actuators Topic 6: Dr. Mahesh S. Narkhede Electrical Engineering Department Government Polytechnic, MumbaiDocument32 pagesElectrical Actuators Topic 6: Dr. Mahesh S. Narkhede Electrical Engineering Department Government Polytechnic, MumbaiVedant .ChavanNo ratings yet
- DC Motors: Types, Design and ApplicationsDocument45 pagesDC Motors: Types, Design and Applicationstristan jeff bautistaNo ratings yet
- Single Phase Induction MotorDocument24 pagesSingle Phase Induction MotorKh Muhammad MashoodNo ratings yet
- Electric Motors: - Classification / TypesDocument24 pagesElectric Motors: - Classification / TypesBholendra ShakarNo ratings yet
- MCR2 EncoderDocument19 pagesMCR2 EncoderCarlos SolanoNo ratings yet
- Brushless DC Motors: Presented by Kumaresan A (161me527) Moutheepan S (161me542)Document18 pagesBrushless DC Motors: Presented by Kumaresan A (161me527) Moutheepan S (161me542)Prakash RajNo ratings yet
- Brushless DC MotorDocument22 pagesBrushless DC MotorPhilip I. Ay-AdNo ratings yet
- Ch2 Stepper MotorDocument60 pagesCh2 Stepper MotorKinjal ShahNo ratings yet
- Module1.Stepper Motor and Its ControlDocument79 pagesModule1.Stepper Motor and Its ControlOmkar GuptaNo ratings yet
- UNIT-3 Robot Drive MechanisamDocument82 pagesUNIT-3 Robot Drive MechanisamChetuNo ratings yet
- Unit 3Document64 pagesUnit 3Yuvan Krishnan VNo ratings yet
- Stepper MotorDocument14 pagesStepper MotorprobirparuiNo ratings yet
- DC Servo MotorsDocument19 pagesDC Servo MotorsSoumitri JenaNo ratings yet
- Unit III SPMDocument65 pagesUnit III SPMMukesh KatoleNo ratings yet
- Brushless DC MotorDocument19 pagesBrushless DC MotorSanjeet KumarNo ratings yet
- Single Phase Induction Motor Starting MechanismsDocument25 pagesSingle Phase Induction Motor Starting MechanismsKh Muhammad Mashood0% (1)
- 1.3 Block DiagramDocument29 pages1.3 Block DiagramAlphaBravoNo ratings yet
- Special Purpose Motors and Control DevicesDocument43 pagesSpecial Purpose Motors and Control DevicesDominick BasNo ratings yet
- Electrical Machine Trainer PDFDocument4 pagesElectrical Machine Trainer PDFaswardiNo ratings yet
- Single-Phase Motors: by Wan Marlina BT Wan AhmadDocument34 pagesSingle-Phase Motors: by Wan Marlina BT Wan AhmadOhmae BaranskiNo ratings yet
- Induction Motor GK DubeyDocument13 pagesInduction Motor GK Dubeysakshamnegi40069No ratings yet
- Introduction To: Hurst Brushless DC MotorsDocument1 pageIntroduction To: Hurst Brushless DC MotorsMehmet KırgözoğluNo ratings yet
- Energy Savings in Air Compressors - by Incorporation of VFDDocument32 pagesEnergy Savings in Air Compressors - by Incorporation of VFDnikut_0777No ratings yet
- Motion Designs Quarterly Publication May 2008 Issue SummaryDocument14 pagesMotion Designs Quarterly Publication May 2008 Issue SummarytooocooolNo ratings yet
- Servo MotorDocument21 pagesServo MotoribrahimNo ratings yet
- Special Purpose MotorsDocument16 pagesSpecial Purpose Motorskasparov001100% (1)
- Energy Conversion One: Chapter NineDocument15 pagesEnergy Conversion One: Chapter NineSneh Deep SKNo ratings yet
- Ed About Brushless MotorsDocument7 pagesEd About Brushless MotorsAddo AdhiyaksaNo ratings yet
- ReciprocatingDocument15 pagesReciprocatingRohit soniNo ratings yet
- Da 60Document10 pagesDa 60Köves IstvánNo ratings yet
- Subaru-Legacy 2005 EN Manual de Taller Control de Emisiones 17fbaf51b7Document9 pagesSubaru-Legacy 2005 EN Manual de Taller Control de Emisiones 17fbaf51b7miguelNo ratings yet
- Almera n16 Europa Ec-K9kDocument214 pagesAlmera n16 Europa Ec-K9kMARK llNo ratings yet
- MX175 MX200 MX250 MX300 MX360 MX400: Owner'S ManualDocument62 pagesMX175 MX200 MX250 MX300 MX360 MX400: Owner'S ManualGem RNo ratings yet
- Fact Sheet Variable Inlet Guide Vane PDFDocument1 pageFact Sheet Variable Inlet Guide Vane PDFemadNo ratings yet
- Agk SorularDocument4 pagesAgk SorularSezgin BayrakNo ratings yet
- Wiring Diagram PDFDocument5 pagesWiring Diagram PDFRichard Wilson Mera Jaime100% (1)
- JMS 620 GS-N.L: Technical SpecificationDocument4 pagesJMS 620 GS-N.L: Technical SpecificationjoellopezzNo ratings yet
- Explore Sonalika's Tractor Manufacturing Process and R&D Centre in 6 Week Internship ReportDocument20 pagesExplore Sonalika's Tractor Manufacturing Process and R&D Centre in 6 Week Internship ReportManpreet Singh Johal100% (3)
- CDS23068 GPRP M1 PackageDocument10 pagesCDS23068 GPRP M1 PackageDavid SvídaNo ratings yet
- Getting Started With Lotus Engine SimulationDocument184 pagesGetting Started With Lotus Engine SimulationbascrabNo ratings yet
- Revision Status SheetDocument8 pagesRevision Status SheetThania Karina Flores Carvajal.No ratings yet
- TA100Document4 pagesTA100chandra jemyNo ratings yet