You might also like
- Chapter 1Document111 pagesChapter 1RIZER l رايزرNo ratings yet
- Instrumentation and Control 2Document26 pagesInstrumentation and Control 2FRANCK DAMSSSNo ratings yet
- Process Control: University of Rizal SystemDocument21 pagesProcess Control: University of Rizal SystemJMNo ratings yet
- Chapter 1 ESE246 PDFDocument18 pagesChapter 1 ESE246 PDFMuhamad AmmarNo ratings yet
- ECNG3004 Control System ApplicationsDocument7 pagesECNG3004 Control System ApplicationsMarlon BoucaudNo ratings yet
- 01 Introduction To Process ControlDocument35 pages01 Introduction To Process ControlJohn DanielNo ratings yet
- Designing of Fuzzy Logic Controller For Liquid Level ControllingDocument10 pagesDesigning of Fuzzy Logic Controller For Liquid Level ControllingSkr KhanNo ratings yet
- 11process Control Fundamentals PDFDocument59 pages11process Control Fundamentals PDFshubhamNo ratings yet
- Experiment 12 Instrumentation and Control LabDocument17 pagesExperiment 12 Instrumentation and Control LabAyesha KhurramNo ratings yet
- Control 3-Lec4 - P&ID DiagramsDocument25 pagesControl 3-Lec4 - P&ID Diagramsmohammed abd el aleemNo ratings yet
- Report ControlDocument33 pagesReport Controlajwadalfatani100% (5)
- 2023 PCI360S Introductory ConceptsDocument19 pages2023 PCI360S Introductory ConceptsSifanele PotwanaNo ratings yet
- Introduction To Process InstrumentationDocument15 pagesIntroduction To Process Instrumentationtaufikrezza85No ratings yet
- Design of Virtual Process Control Laboratory (VPCL) Using First Principle Method and Interactive PID Control Toolkit Using LabviewDocument5 pagesDesign of Virtual Process Control Laboratory (VPCL) Using First Principle Method and Interactive PID Control Toolkit Using Labviewahmed ubeedNo ratings yet
- Control System Engineering: InstructorsDocument49 pagesControl System Engineering: InstructorsHANSANo ratings yet
- Idea DescaptionDocument14 pagesIdea DescaptionNik JaffNo ratings yet
- PID ControllerDocument16 pagesPID ControllermarraurdersNo ratings yet
- Industrial Process Control Basic ConceptsDocument39 pagesIndustrial Process Control Basic Conceptskaezzar10100% (1)
- Pci Lab Manual (2) StudentDocument67 pagesPci Lab Manual (2) StudentTewodros AsfawNo ratings yet
- AssignmentDocument28 pagesAssignmentfaisal58650No ratings yet
- amr.945 949.2559Document5 pagesamr.945 949.2559Huynh Trung HieuNo ratings yet
- 5 Process Control Dec 8Document61 pages5 Process Control Dec 8heroNo ratings yet
- IPC CH 1-1Document35 pagesIPC CH 1-1yashy4032No ratings yet
- © Career Avenues A1Document160 pages© Career Avenues A1Nomee PatelNo ratings yet
- 1 Introduction To Process ControlDocument59 pages1 Introduction To Process Controlenge.aqeelNo ratings yet
- ControlDocument43 pagesControlaramNo ratings yet
- 01 - Introduction To Process ControlDocument59 pages01 - Introduction To Process Controlafoead100% (1)
- Instrumentation Engineering Questions & AnswersDocument10 pagesInstrumentation Engineering Questions & AnswerscontgautamNo ratings yet
- Ic1352 - Process Control-2 MarksDocument21 pagesIc1352 - Process Control-2 MarksKaushal Kishor100% (1)
- Experiment No. 04: DR D Y Patil School of Engineering & TechnologyDocument4 pagesExperiment No. 04: DR D Y Patil School of Engineering & Technologypradnya sadigaleNo ratings yet
- Chapter 1 - IntroductionDocument33 pagesChapter 1 - IntroductionHuy Nguyen LuongNo ratings yet
- Experiment No 8 IC LabDocument12 pagesExperiment No 8 IC LabAyesha KhurramNo ratings yet
- Process Control Lab ReportDocument23 pagesProcess Control Lab ReportAnonymous OWdJRM8C100% (1)
- Basic Chemical EngineeringDocument13 pagesBasic Chemical EngineeringpratikNo ratings yet
- W7ADocument15 pagesW7AShujah RashidNo ratings yet
- Measurement, Regulation and AutomationDocument77 pagesMeasurement, Regulation and AutomationazmatNo ratings yet
- 3 Elements of Process Control SystemDocument12 pages3 Elements of Process Control SystemAatif AltafNo ratings yet
- Process Control SystemsDocument3 pagesProcess Control SystemsHammad AnsariNo ratings yet
- To Process Control: Dr. Ahmed Kamal El-DINDocument21 pagesTo Process Control: Dr. Ahmed Kamal El-DINJooNo ratings yet
- EEIB413 Chapter 1 - StudentDocument84 pagesEEIB413 Chapter 1 - StudentSanjanaLakshmi50% (2)
- Introduction To Process Automation - Process ControlDocument46 pagesIntroduction To Process Automation - Process ControlAli Asgerov100% (1)
- اخررررر تعديلDocument10 pagesاخررررر تعديلAhmed nawfalNo ratings yet
- An Introduction To Automatic ControlsDocument43 pagesAn Introduction To Automatic ControlsPrudhvi RajNo ratings yet
- Theory: Objectiv eDocument8 pagesTheory: Objectiv eMuhammad UsamaNo ratings yet
- Chapter#1 - Control SystemsDocument24 pagesChapter#1 - Control SystemsMohammad BilalNo ratings yet
- (Ok) Comparative Study of PID Controlled Modes On Automatic Water Level Measurement SystemDocument6 pages(Ok) Comparative Study of PID Controlled Modes On Automatic Water Level Measurement SystemPHONG LÊ BÁNo ratings yet
- Process Control: WWW - Control-Systems-Principles - Co.uk. CE117 Process ControlDocument6 pagesProcess Control: WWW - Control-Systems-Principles - Co.uk. CE117 Process ControlSharifah Zulaikha BenYahyaNo ratings yet
- 2024 Lesson 1 - Part 1 - Introduction To Control SystemsDocument24 pages2024 Lesson 1 - Part 1 - Introduction To Control Systemspontshobridgett16No ratings yet
- Control Lab Project ReportDocument28 pagesControl Lab Project ReportDanyal QamarNo ratings yet
- Automatic Control SystemsDocument3 pagesAutomatic Control SystemsIffatNo ratings yet
- PIDDocument17 pagesPIDFlorian Pjetri100% (1)
- Lectures Process ControlDocument98 pagesLectures Process Controlrizzagorospe100% (1)
- ME 461 Control Engineering: Semester: July 2017Document32 pagesME 461 Control Engineering: Semester: July 2017Sudipta PaulNo ratings yet
- Control System TechnologyDocument106 pagesControl System TechnologyRisimic NebojsaNo ratings yet
- Control SystemsDocument18 pagesControl Systemsgayatri jaltareNo ratings yet
- TminDocument17 pagesTminhanaNo ratings yet
- PROCON Student ManualDocument48 pagesPROCON Student ManualPaul100% (1)
- Lecture1, Process Control and AnalysisDocument60 pagesLecture1, Process Control and AnalysisPaul RwomwijhuNo ratings yet
- Control 3-Lec 5 - Controller Principles - (Discontinous Type)Document16 pagesControl 3-Lec 5 - Controller Principles - (Discontinous Type)mohammed abd el aleemNo ratings yet
- Module 4.1 Static RoutingDocument17 pagesModule 4.1 Static Routingmohammed abd el aleemNo ratings yet
- Quizzes-Solution: Calculate and Plot The Output Waveform If The Lower 3-dB Frequency Is 0.3 HZDocument4 pagesQuizzes-Solution: Calculate and Plot The Output Waveform If The Lower 3-dB Frequency Is 0.3 HZmohammed abd el aleemNo ratings yet
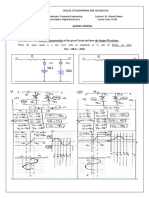
- Quizzes-Solution: Find and Draw The Transfer Characteristics of The Given Circuit and Show The Output WaveformDocument5 pagesQuizzes-Solution: Find and Draw The Transfer Characteristics of The Given Circuit and Show The Output Waveformmohammed abd el aleemNo ratings yet
- 750 Hcia R&SDocument148 pages750 Hcia R&Sbahnasse54% (13)
- CSE509 Networks 2Document2 pagesCSE509 Networks 2mohammed abd el aleemNo ratings yet
- Ram BookDocument52 pagesRam BookRobson FletcherNo ratings yet
- Statistics 2Document121 pagesStatistics 2Ravi KNo ratings yet
- Steinecker Boreas: Wort Stripping of The New GenerationDocument16 pagesSteinecker Boreas: Wort Stripping of The New GenerationAlejandro Javier Delgado AraujoNo ratings yet
- Standards Guide 1021 1407Document8 pagesStandards Guide 1021 1407Anjur SiNo ratings yet
- CFA L1 Ethics Questions and AnswersDocument94 pagesCFA L1 Ethics Questions and AnswersMaulik PatelNo ratings yet
- 127 Bba-204Document3 pages127 Bba-204Ghanshyam SharmaNo ratings yet
- Dur MalappuramDocument114 pagesDur MalappuramSabareesh RaveendranNo ratings yet
- English 7 q3 Week2 Daily Lesson LogDocument5 pagesEnglish 7 q3 Week2 Daily Lesson LogKILVEN MASIONNo ratings yet
- MSC 200Document18 pagesMSC 200Amit KumarNo ratings yet
- PDF RR Grade Sep ProjectsDocument46 pagesPDF RR Grade Sep ProjectsjunqiangdongNo ratings yet
- Journal of Power Sources: Binyu Xiong, Jiyun Zhao, Zhongbao Wei, Maria Skyllas-KazacosDocument12 pagesJournal of Power Sources: Binyu Xiong, Jiyun Zhao, Zhongbao Wei, Maria Skyllas-KazacosjayashreeNo ratings yet
- Shape It! SB 1Document13 pagesShape It! SB 1Ass of Fire50% (6)
- Esp-2000 BSDocument6 pagesEsp-2000 BSByron LopezNo ratings yet
- Antibiotic I and II HWDocument4 pagesAntibiotic I and II HWAsma AhmedNo ratings yet
- LLB IV Sem GST Unit I Levy and Collection Tax by DR Nisha SharmaDocument7 pagesLLB IV Sem GST Unit I Levy and Collection Tax by DR Nisha Sharmad. CNo ratings yet
- Biology Concepts and Applications 9th Edition Starr Solutions ManualDocument9 pagesBiology Concepts and Applications 9th Edition Starr Solutions Manualscarletwilliamnfz100% (31)
- Vedic Town Planning ConceptsDocument17 pagesVedic Town Planning ConceptsyaminiNo ratings yet
- Catalyst 4500 SeriesDocument1,230 pagesCatalyst 4500 SeriesnvleninkumarNo ratings yet
- Luigi Cherubini Requiem in C MinorDocument8 pagesLuigi Cherubini Requiem in C MinorBen RutjesNo ratings yet
- ECDIS Presentation Library 4Document16 pagesECDIS Presentation Library 4Orlando QuevedoNo ratings yet
- International Beach Soccer Cup Bali 2023 October 4-7 - Ver 15-3-2023 - Sponsor UPDATED PDFDocument23 pagesInternational Beach Soccer Cup Bali 2023 October 4-7 - Ver 15-3-2023 - Sponsor UPDATED PDFPrincess Jasmine100% (1)
- Chapter 1Document20 pagesChapter 1Li YuNo ratings yet
- 4th Conference ParticipantsDocument14 pages4th Conference ParticipantsmaxNo ratings yet
- Personal ComputerDocument3 pagesPersonal ComputerDan Mark IsidroNo ratings yet
- Indiana Property Tax Benefits: (This Form Must Be Printed On Gold or Yellow Paper)Document2 pagesIndiana Property Tax Benefits: (This Form Must Be Printed On Gold or Yellow Paper)abramsdcNo ratings yet
- KVM Architecture OverviewDocument15 pagesKVM Architecture Overviewdattbbk1No ratings yet
- PCI Secure Software Standard v1 - 0Document67 pagesPCI Secure Software Standard v1 - 0Antonio ClimaNo ratings yet
- TMIS07 - Kalam Internship - S7 Tesla MindsDocument3 pagesTMIS07 - Kalam Internship - S7 Tesla MindsDMJ JonesNo ratings yet
- Bajaj Allianz General Insurance CompanyDocument4 pagesBajaj Allianz General Insurance Companysarath potnuriNo ratings yet