You might also like
- GEM One Sapphire V2 Installation Manual PDFDocument17 pagesGEM One Sapphire V2 Installation Manual PDFMaynor Ruiz100% (1)
- CECSC07 Register Transfer and MicrooperationsDocument27 pagesCECSC07 Register Transfer and MicrooperationsAnmol Agrawal100% (4)
- Guangzhou Nuocai NC-UV0609 (2017) Specification of Digital Uv Led Flatbed PrinterDocument5 pagesGuangzhou Nuocai NC-UV0609 (2017) Specification of Digital Uv Led Flatbed PrinterJorge Chaves Rosero100% (1)
- Multiplexer and DemultiplexerDocument5 pagesMultiplexer and DemultiplexerAdebayo AdebariNo ratings yet
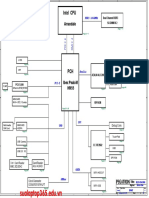
- Sualaptop365.Edu - VN - Asus Pegatron H46Y Rev. 1.1 0401 LGDocument60 pagesSualaptop365.Edu - VN - Asus Pegatron H46Y Rev. 1.1 0401 LGMoh HamNo ratings yet
- B Ucs C-Series RN 4 0 4Document38 pagesB Ucs C-Series RN 4 0 4thalhaNo ratings yet
- Multiplex Er 1Document19 pagesMultiplex Er 1pkrk123456789100% (1)
- Multiplexer and DemultiplexerDocument18 pagesMultiplexer and DemultiplexerTara SharmaNo ratings yet
- Design A Full Adder by Using Two Half Adders. (7M, May-19)Document10 pagesDesign A Full Adder by Using Two Half Adders. (7M, May-19)Sri Silpa PadmanabhuniNo ratings yet
- Bus and Memory Transfer For YoutubeDocument15 pagesBus and Memory Transfer For Youtubesaumya2213215No ratings yet
- Computer Architecture and Organization LecturesDocument85 pagesComputer Architecture and Organization LecturesuzaifaNo ratings yet
- COMBINATIONAL & SEQUENTIAL LOGIC CIRCUITSDocument168 pagesCOMBINATIONAL & SEQUENTIAL LOGIC CIRCUITSpinokyuNo ratings yet
- MultiplexerDocument16 pagesMultiplexerPARTEEK RANANo ratings yet
- Combinational Circuits Part IIDocument8 pagesCombinational Circuits Part IIchans08No ratings yet
- MUXDocument6 pagesMUXSunil KumarNo ratings yet
- Lec 5 Common BusDocument39 pagesLec 5 Common Busashaba martinNo ratings yet
- COMP ORG Week 2Document63 pagesCOMP ORG Week 2Raazia SaherNo ratings yet
- DD and COmodule 2Document97 pagesDD and COmodule 2Madhura N KNo ratings yet
- Combinational CircuitsDocument5 pagesCombinational CircuitsRafena17No ratings yet
- Computer Organization UNIT-3 Processor and Control Unit: Fundamental ConceptsDocument23 pagesComputer Organization UNIT-3 Processor and Control Unit: Fundamental ConceptsAbhinav BhardwajNo ratings yet
- Coa Unit 1Document83 pagesCoa Unit 1Shiv Patel 18-38No ratings yet
- Combinational Circuits: 4 To 2 EncoderDocument5 pagesCombinational Circuits: 4 To 2 EncoderRafena MustaphaNo ratings yet
- Karnaugh Map Simplification GuideDocument14 pagesKarnaugh Map Simplification GuideSravani GunnuNo ratings yet
- Lab Report 4Document10 pagesLab Report 4abdulbabulNo ratings yet
- Combinational CircuitsDocument44 pagesCombinational CircuitsWisdom tabuloNo ratings yet
- University of Essex: School of Computer Science andDocument6 pagesUniversity of Essex: School of Computer Science andVlad SimizeanuNo ratings yet
- Multiplexer & de Multiplexer-4Document48 pagesMultiplexer & de Multiplexer-4Mritunjay YadavNo ratings yet
- Multiplexer and De-MultiplexerDocument29 pagesMultiplexer and De-Multiplexerkid uniqueNo ratings yet
- Data Processing CircuitsDocument19 pagesData Processing CircuitsBhaskar MNo ratings yet
- DecoderDocument9 pagesDecoderYves AbalosNo ratings yet
- Register Transfer and Bus Systems in 40 CharactersDocument20 pagesRegister Transfer and Bus Systems in 40 CharactersKashmai TomarNo ratings yet
- Presentation On: Bus and Memory Transfer Prepared by Akhil Kandpal and Dikshant Rana (00216702019, 00216702019)Document14 pagesPresentation On: Bus and Memory Transfer Prepared by Akhil Kandpal and Dikshant Rana (00216702019, 00216702019)A N K I TNo ratings yet
- Digital LogicDocument6 pagesDigital LogicIS-HAK SULEMAN BAAKONo ratings yet
- MUX Demux: Understanding Multiplexers and DemultiplexersDocument8 pagesMUX Demux: Understanding Multiplexers and Demultiplexerskarim mohamedNo ratings yet
- Register Transfer Logic: This ChapterDocument25 pagesRegister Transfer Logic: This ChapterSai lakshmi SindhuraNo ratings yet
- Multiplexer Circuit and How It WorksDocument9 pagesMultiplexer Circuit and How It WorksEpnixNo ratings yet
- CA NotesDocument10 pagesCA NotesRuhitha Shanmugham VenkateswariNo ratings yet
- The MultiplexerDocument8 pagesThe MultiplexerAlinChanNo ratings yet
- VHDL Lab RecordDocument13 pagesVHDL Lab RecordRajBhanNo ratings yet
- Register Transfer and Micro-Operations UNIT-1Document53 pagesRegister Transfer and Micro-Operations UNIT-1Anjan Kumar KantepalliNo ratings yet
- Computer Organization & ArchitectureDocument82 pagesComputer Organization & ArchitectureDhirendra SinghNo ratings yet
- Register Transfer and Microoperations Lecture SlidesDocument69 pagesRegister Transfer and Microoperations Lecture SlidesSeid AdemNo ratings yet
- MP AssignmentDocument12 pagesMP AssignmentAdityaNo ratings yet
- Lab 9 Comb CKT With MUX and DEC Full PackageDocument4 pagesLab 9 Comb CKT With MUX and DEC Full PackageLoveWorldCanadaNo ratings yet
- RTL Guide to Register Transfer LanguagesDocument40 pagesRTL Guide to Register Transfer LanguagesultimatetycoonNo ratings yet
- Chapter 7: Register Transfer: ObjectivesDocument7 pagesChapter 7: Register Transfer: ObjectivesSteffany RoqueNo ratings yet
- Structures To Set.: On A ADocument4 pagesStructures To Set.: On A ASurya Ganesh PenagantiNo ratings yet
- MPMC EEE Externalkey 2023Document4 pagesMPMC EEE Externalkey 2023srinivas kanakalaNo ratings yet
- The Multiplexer: Basic Multiplexing SwitchDocument8 pagesThe Multiplexer: Basic Multiplexing SwitchJohn Brix BalisterosNo ratings yet
- Demultiplexer AssignmentDocument4 pagesDemultiplexer AssignmentMuhammad ParasNo ratings yet
- Coa Question BankDocument97 pagesCoa Question BankSaiteja KandakatlaNo ratings yet
- UNIT-1 Serial BusesDocument67 pagesUNIT-1 Serial BusesJalal WadoodNo ratings yet
- Logic Gates Combinational CircuitsDocument22 pagesLogic Gates Combinational CircuitsAbhishek AryanNo ratings yet
- DCADocument5 pagesDCADeepak PariharNo ratings yet
- Cs Important Questions by UjjwalDocument19 pagesCs Important Questions by Ujjwalkumawatujjwal18No ratings yet
- COMBINATIONAL CIRCUITS Part 1Document28 pagesCOMBINATIONAL CIRCUITS Part 1Roob HoodNo ratings yet
- Gate MaterialsDocument13 pagesGate MaterialsnjparNo ratings yet
- Bus and Memory TransfersDocument14 pagesBus and Memory TransfersDaniel RizviNo ratings yet
- Chapter 5Document12 pagesChapter 5Sonia MadueñoNo ratings yet
- Computer Architecture and Organization-17Ec2504A: Prepared by Vbklaruna Asst Professor, EceDocument54 pagesComputer Architecture and Organization-17Ec2504A: Prepared by Vbklaruna Asst Professor, Ece188W1A04B0-SEC-B Vankeswaram Bhargava SandeepNo ratings yet
- CO Unit 1 (Complete)Document42 pagesCO Unit 1 (Complete)Saurabh JaiswalNo ratings yet
- Sensor de Nivel Tanque KA01034PEN - 0516Document52 pagesSensor de Nivel Tanque KA01034PEN - 0516Lucio Falbi FernandezNo ratings yet
- KTM Bike Showroom ManagementDocument43 pagesKTM Bike Showroom ManagementJàğàñAďháváňNo ratings yet
- NE20 Hardware Description PDFDocument128 pagesNE20 Hardware Description PDFFayyaz AhmedNo ratings yet
- MDT - On-Off Boarding Checklist - Template - V.4. - Revised 2013-11-25 - MedisettyDocument3 pagesMDT - On-Off Boarding Checklist - Template - V.4. - Revised 2013-11-25 - MedisettyRamesh V M100% (1)
- Midea Precision AC Technical Manual - Top Delivery SeriesDocument97 pagesMidea Precision AC Technical Manual - Top Delivery SeriesDavid Ramos Carvajal100% (1)
- Shared Nothing ArchitecturesDocument19 pagesShared Nothing ArchitecturesJames CuttsNo ratings yet
- Mocha AE CC Plugin UserGuide PDFDocument81 pagesMocha AE CC Plugin UserGuide PDFMikhail DanilikNo ratings yet
- What Is AutomationDocument2 pagesWhat Is AutomationFaiz Syed MohammedNo ratings yet
- Mingw, A Contraction of "Minimalist Gnu For Windows", Is A Minimalist Development Environment For Native Microsoft Windows ApplicationsDocument5 pagesMingw, A Contraction of "Minimalist Gnu For Windows", Is A Minimalist Development Environment For Native Microsoft Windows ApplicationssancrisxaNo ratings yet
- MB Manual N5105i-H e 230217Document33 pagesMB Manual N5105i-H e 230217rodolfoNo ratings yet
- 11N95 DGT PH2 DSDocument50 pages11N95 DGT PH2 DSSundar RamasamyNo ratings yet
- 2250 Transmission ToolsDocument15 pages2250 Transmission ToolsRakesh KongalaNo ratings yet
- Drawing A Line With A Dimension in AutoCADDocument18 pagesDrawing A Line With A Dimension in AutoCADAnonymous QI9xEjrbplNo ratings yet
- Anritsu S810C - S820CDocument20 pagesAnritsu S810C - S820CErika Mae EnticoNo ratings yet
- Usg Flex 100W - 1Document5 pagesUsg Flex 100W - 1ahmedNo ratings yet
- 74LS09Document4 pages74LS09Muammar RiskiNo ratings yet
- Ecografo Wed 3000 Manual Usuario Wed 3000v en 4-4-1Document56 pagesEcografo Wed 3000 Manual Usuario Wed 3000v en 4-4-1Alejandro Img100% (1)
- Microcontrollers and Its ApplicationDocument55 pagesMicrocontrollers and Its ApplicationKabilesh GopalakrishnanNo ratings yet
- STM 32 H 750 VBDocument337 pagesSTM 32 H 750 VBZafer AtakanNo ratings yet
- Describe ObjectDocument11 pagesDescribe ObjectFerri AinurrofikiNo ratings yet
- Best Practices For Deploying Visual Basic 6.0 ApplicationsDocument6 pagesBest Practices For Deploying Visual Basic 6.0 ApplicationsarmorosNo ratings yet
- A Modified Sepic Converter For High-Power-FactorDocument23 pagesA Modified Sepic Converter For High-Power-FactorSana YasmeenNo ratings yet
- CBSE Class 11 Informatics Practices Sample Paper-02 (Solved)Document12 pagesCBSE Class 11 Informatics Practices Sample Paper-02 (Solved)cbsesamplepaper100% (1)
- Quickstart Rw14 SuDocument1 pageQuickstart Rw14 SuIvan TaslimNo ratings yet
- HP 8564E & 8565E Service ComDocument43 pagesHP 8564E & 8565E Service ComBabatunde YusuffNo ratings yet
- Network Cable Color CodesDocument2 pagesNetwork Cable Color CodesMartin GomezNo ratings yet