You might also like
- 1-Phase Induction MotorDocument20 pages1-Phase Induction MotorNure AlamNo ratings yet
- Split Phase Induction Motor: Run Start TDocument4 pagesSplit Phase Induction Motor: Run Start TnikunjNo ratings yet
- Split Phase Induction Motor: Single Phase Induction Motors Single Phase Induction MotorsDocument5 pagesSplit Phase Induction Motor: Single Phase Induction Motors Single Phase Induction MotorsTanveer HajanoNo ratings yet
- Single Phase Induction Motor Cross-Field TheoryDocument15 pagesSingle Phase Induction Motor Cross-Field TheoryShoaib Khan100% (1)
- Single Phase Induction MotorsDocument22 pagesSingle Phase Induction MotorsKALYANKOLO UMARUNo ratings yet
- (Single+Three) Phase Induction Motors Interview Questions SetDocument18 pages(Single+Three) Phase Induction Motors Interview Questions SetrajshahieeeNo ratings yet
- EDCA Module 5Document16 pagesEDCA Module 5Sh PNo ratings yet
- Chapter 7Document36 pagesChapter 7meeedooo.abo.elenenNo ratings yet
- Single Phase Induction Motors Single Phase Induction Motors Inductor CapacitorDocument6 pagesSingle Phase Induction Motors Single Phase Induction Motors Inductor CapacitoragreykatoNo ratings yet
- Single-Phase Induction Motor Chapter SummaryDocument20 pagesSingle-Phase Induction Motor Chapter SummarythangaprakashNo ratings yet
- Single Phase IMDocument36 pagesSingle Phase IMHassan SNo ratings yet
- Single Phase Induction MotorsDocument11 pagesSingle Phase Induction MotorsSafnas KariapperNo ratings yet
- Unit 3Document19 pagesUnit 3Monika GNo ratings yet
- Single phase induction motor working explained in 40 stepsDocument57 pagesSingle phase induction motor working explained in 40 stepsChristian Malaluan100% (1)
- Single Phase Induction MotorDocument22 pagesSingle Phase Induction MotorMubashshir AminNo ratings yet
- EMD II UNIT 3 Design of Single Phase Induction MotorDocument87 pagesEMD II UNIT 3 Design of Single Phase Induction Motorbilalbaig97No ratings yet
- Capacitor MotorDocument4 pagesCapacitor MotorianguiebNo ratings yet
- Single Phase Induction MotorsDocument18 pagesSingle Phase Induction MotorsAMIE Study Circle, RoorkeeNo ratings yet
- Unit 2 Single Phase Induction Motor - Watermark PDFDocument21 pagesUnit 2 Single Phase Induction Motor - Watermark PDFPalak Jio100% (1)
- AC Machine 4Document35 pagesAC Machine 4Fadhil A. HasanNo ratings yet
- AmanDocument19 pagesAmanGirijesh Yadav0% (1)
- Free-Samples Amie Chapters Single Phase Induction MotorsDocument19 pagesFree-Samples Amie Chapters Single Phase Induction MotorsStitch BeatzNo ratings yet
- EE 6504 Electrical Machines-II Mrs.P.Priyadharshini, AP/RMDEEEDocument37 pagesEE 6504 Electrical Machines-II Mrs.P.Priyadharshini, AP/RMDEEEAhmad JmaliaNo ratings yet
- SINGLE PHASE INDUCTION MOTORS-SummarizedDocument4 pagesSINGLE PHASE INDUCTION MOTORS-SummarizedMercie KishNo ratings yet
- Chapter 04 Polyphase Synchronous MotorDocument19 pagesChapter 04 Polyphase Synchronous MotorAbdullrahman Al-ShammaaNo ratings yet
- 10-Tutorial of Induction MotorDocument48 pages10-Tutorial of Induction Motorrida.hamza.muhammadNo ratings yet
- Motor StarterDocument3 pagesMotor Startermd alamin bin SiddiqueNo ratings yet
- Module 4 3Document24 pagesModule 4 3Atharva KhadseNo ratings yet
- 6 EE441 3 Phase Synchronous MotorsDocument11 pages6 EE441 3 Phase Synchronous MotorsFos AlharbiNo ratings yet
- Induction MotorDocument31 pagesInduction MotorAvijitNo ratings yet
- AC Machines (2)Document22 pagesAC Machines (2)Utkarsh ShuklaNo ratings yet
- Single Phase I.MDocument19 pagesSingle Phase I.Mdevanshurajpoot1No ratings yet
- 1L Single - Phase IMDocument17 pages1L Single - Phase IMAli AltahirNo ratings yet
- 2L Single Phase IM PDFDocument28 pages2L Single Phase IM PDFAli AltahirNo ratings yet
- Design & Fabrication of 1-Ph Induction Motor Starter MANUALDocument5 pagesDesign & Fabrication of 1-Ph Induction Motor Starter MANUALSreenidhi SrungaramNo ratings yet
- Single Phase Induction MotorDocument19 pagesSingle Phase Induction MotorVarsheni PadmanabhanNo ratings yet
- Module 5.2pptxDocument17 pagesModule 5.2pptxPratik MandiNo ratings yet
- Split Phase MotorDocument6 pagesSplit Phase MotorPhelan RoqueNo ratings yet
- Single Phase Induction MotorsDocument19 pagesSingle Phase Induction MotorsRahulGundeNo ratings yet
- Fractional Kilowatt MotorsDocument37 pagesFractional Kilowatt MotorsPavan Kumar100% (1)
- Machine 2Document19 pagesMachine 2Manvendra Singh ShekhawatNo ratings yet
- Ac MotorsDocument17 pagesAc MotorsPineappleJamNo ratings yet
- 1 PH MotorsDocument2 pages1 PH MotorsthiyagarajanNo ratings yet
- Semi Finals - Finals Lec - Ac DC MachineryDocument33 pagesSemi Finals - Finals Lec - Ac DC MachineryJohnlloyd BarretoNo ratings yet
- New Microsoft Word DocumentDocument5 pagesNew Microsoft Word DocumentraviNo ratings yet
- Synchronous Motor BasicsDocument9 pagesSynchronous Motor BasicsOmed OthmanNo ratings yet
- Chapter 10 Single Phase Motors EE 342Document21 pagesChapter 10 Single Phase Motors EE 342Ali AhmadNo ratings yet
- Delta Connected Systems and Power Factor in AC MotorsDocument32 pagesDelta Connected Systems and Power Factor in AC MotorsSyed MamnoonNo ratings yet
- Single Phase Induction MotorDocument5 pagesSingle Phase Induction MotorSridhar SridharNo ratings yet
- Single Phase MotorDocument32 pagesSingle Phase MotorsnzaimahNo ratings yet
- Single Phase Induction Motor Classification Based On Starting MethodDocument21 pagesSingle Phase Induction Motor Classification Based On Starting MethodAli AltahirNo ratings yet
- Induction MotorDocument24 pagesInduction MotorAMAMA KHANNo ratings yet
- EEC Unit VDocument10 pagesEEC Unit VTushar ShindeNo ratings yet
- Types of Single Phase Induction Motors GuideDocument13 pagesTypes of Single Phase Induction Motors GuidewazidulNo ratings yet
- CH 5 - Special MachinesDocument14 pagesCH 5 - Special MachinesMirkena kebedeNo ratings yet
- Unit 4Document23 pagesUnit 4Ayush SrivastavaNo ratings yet
- EMD Important Questions Unit-III Starting MethodsDocument9 pagesEMD Important Questions Unit-III Starting MethodsJoseph HarindranathNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Katalog tlb890Document147 pagesKatalog tlb890Max SashikhinNo ratings yet
- EFS#2000-EN Rev 1Document36 pagesEFS#2000-EN Rev 1Capacitacion Todocat100% (1)
- Actual Model 81D Operating Manual 2015Document23 pagesActual Model 81D Operating Manual 2015Guillermo melendezNo ratings yet
- Limit Switches XC2JCDocument2 pagesLimit Switches XC2JCCatur WahyudiNo ratings yet
- Ga30-55cwpack - FF - Eleki - Ii - Aii 380 000 (2005-04)Document146 pagesGa30-55cwpack - FF - Eleki - Ii - Aii 380 000 (2005-04)Ricardo Lopez Padua67% (6)
- 323D Excavator Hydraulic System: Machine Component LocationsDocument2 pages323D Excavator Hydraulic System: Machine Component LocationsKJDNKJZEF100% (1)
- SML Series Pressure SensorDocument2 pagesSML Series Pressure Sensorkishan1234No ratings yet
- Hynds Watermain Catalogue October 2015 EmailDocument128 pagesHynds Watermain Catalogue October 2015 EmailTHEARY THUNNo ratings yet
- Bar Utensil InventoryDocument3 pagesBar Utensil Inventoryaditya permanaNo ratings yet
- Steri-Dent Sterilizer Dry Heat Manual PDFDocument2 pagesSteri-Dent Sterilizer Dry Heat Manual PDFFitria WullerNo ratings yet
- Parts Book 141476Document1,588 pagesParts Book 141476asrael2No ratings yet
- Selection of Transmission Timing Belts 1: (Technical Data)Document7 pagesSelection of Transmission Timing Belts 1: (Technical Data)korkieNo ratings yet
- Y Strainer 50 MM DiaDocument27 pagesY Strainer 50 MM Diamudassir mNo ratings yet
- Safety Shower Installation GuideDocument62 pagesSafety Shower Installation Guidedeokarswapnil88No ratings yet
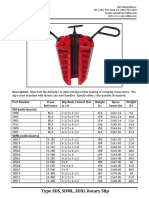
- Type SDS SDML SDXL Rotary Slip Cut SheetDocument2 pagesType SDS SDML SDXL Rotary Slip Cut SheetJose Barrero100% (1)
- ATA 32-Landing Gear DIFF R26Document81 pagesATA 32-Landing Gear DIFF R26NadirNo ratings yet
- Control your lights from anywhere with this all-in-one Wi-Fi dimmer moduleDocument2 pagesControl your lights from anywhere with this all-in-one Wi-Fi dimmer moduleKamil ŁuczakNo ratings yet
- Sensors and Actuators SyllabusDocument14 pagesSensors and Actuators SyllabusKeerthan R VarmaNo ratings yet
- SP60/SP80 User Manual GuideDocument48 pagesSP60/SP80 User Manual Guideyassine express hdNo ratings yet
- Fbs-Plc User'S Manual【Hardware】Document67 pagesFbs-Plc User'S Manual【Hardware】Igal GalilNo ratings yet
- Fremap Hot Air Tool HeaterDocument2 pagesFremap Hot Air Tool HeaterFremap Industries S ANo ratings yet
- Fcat 1000-N Installation and User GuideDocument24 pagesFcat 1000-N Installation and User GuideivynashNo ratings yet
- 7 Plexo 55 50 - 55Document6 pages7 Plexo 55 50 - 55Demo OnlyNo ratings yet
- Isq IomDocument19 pagesIsq IomJericho EstrellaNo ratings yet
- Product Guide 2002-03 Asia Pacific Molex Premise NetworksDocument27 pagesProduct Guide 2002-03 Asia Pacific Molex Premise NetworksPammaNo ratings yet
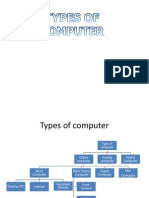
- 4 Types of ComputerDocument28 pages4 Types of ComputerFaiz Akram67% (3)
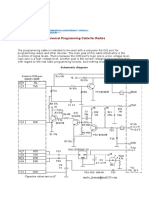
- A Universal Programming Cable For Radios: Schematic DiagramDocument60 pagesA Universal Programming Cable For Radios: Schematic Diagrambairt1972No ratings yet
- 3300 XL Series 25mm Datasheet EnglishDocument29 pages3300 XL Series 25mm Datasheet EnglishViet DinhTrongNo ratings yet
- Golden Mask 3 Plus TurboDocument10 pagesGolden Mask 3 Plus TurboGaby SpanNo ratings yet
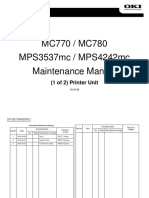
- MC780 - Maintenance Manual (1 of 2) Printer UnitDocument221 pagesMC780 - Maintenance Manual (1 of 2) Printer UnitSidnei OliveiraNo ratings yet