You might also like
- Cipm Level II Study SessionsDocument18 pagesCipm Level II Study SessionsSupunDNo ratings yet
- Supria HitachiDocument15 pagesSupria HitachiNguyễn Văn HoanNo ratings yet
- Notes Tee602 Polar PlotDocument33 pagesNotes Tee602 Polar PlottansnvarmaNo ratings yet
- Polar Plot and Its Analysis GATE Study Material in PDFDocument6 pagesPolar Plot and Its Analysis GATE Study Material in PDFimvuuser1No ratings yet
- Chapter 6slideDocument72 pagesChapter 6slidehailegebreselassie24No ratings yet
- Polar Plot and Its Analysis - GATE Study Material in PDFDocument6 pagesPolar Plot and Its Analysis - GATE Study Material in PDFnidhi tripathiNo ratings yet
- Chapter 6 SRDocument137 pagesChapter 6 SRMadhusmita BarikNo ratings yet
- R(S) C(S)Document16 pagesR(S) C(S)Ananthan SrijithNo ratings yet
- Control - System - Chapter 6 - 8EDocument51 pagesControl - System - Chapter 6 - 8EE24089046林雯琪No ratings yet
- 304 L10 - Frequency ResponseDocument7 pages304 L10 - Frequency ResponseSyed AhmedNo ratings yet
- Frequency ResponseDocument62 pagesFrequency ResponseSujin PrajapatiNo ratings yet
- Tutorial 11Document25 pagesTutorial 11Yang ElvisQUNo ratings yet
- Control Systems Theory: Sinusoidal Tools STB 35103Document42 pagesControl Systems Theory: Sinusoidal Tools STB 35103Akula VeerrajuNo ratings yet
- Bode Plot PresentationDocument48 pagesBode Plot PresentationJulcemar CapellaroNo ratings yet
- Freq ResponseDocument23 pagesFreq Responselili aboudNo ratings yet
- Feedback Control Systems: Lecture Notes-12/12Document10 pagesFeedback Control Systems: Lecture Notes-12/12Aastha SinghNo ratings yet
- System Representation: - Where The Input Signal Is of Z-TransformDocument36 pagesSystem Representation: - Where The Input Signal Is of Z-TransformPallavi NalawadeNo ratings yet
- Notes Tee602 Polar PlotDocument33 pagesNotes Tee602 Polar PlotAnonymous kj9KW15CQnNo ratings yet
- By: Nafees Ahmed Asstt. Prof., EE Deptt, DIT, DehradunDocument33 pagesBy: Nafees Ahmed Asstt. Prof., EE Deptt, DIT, DehradunVinay PrakashNo ratings yet
- Chapter 14Document6 pagesChapter 14李承家No ratings yet
- Feedback CharacteristicsDocument17 pagesFeedback CharacteristicsRajendar PonagantiNo ratings yet
- Chapter 5 Transmission LinesDocument33 pagesChapter 5 Transmission Lines123 georgeNo ratings yet
- Bode Plot - EC 502Document37 pagesBode Plot - EC 502ajay meena100% (2)
- Bode PlotDocument38 pagesBode PlotjaganathapandianNo ratings yet
- Stability of LTI System BTech - Part-III-Freq Domain Analysis (Compatibility Mode)Document107 pagesStability of LTI System BTech - Part-III-Freq Domain Analysis (Compatibility Mode)Akash RoyNo ratings yet
- Polar Plot of Frequency ResponseDocument5 pagesPolar Plot of Frequency ResponseDilip GNo ratings yet
- 351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 1 EE419 Lec1 Nyquist - PlotDocument16 pages351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 1 EE419 Lec1 Nyquist - Plotyoussef hossamNo ratings yet
- Frequency Response Method (Continue)Document37 pagesFrequency Response Method (Continue)Edo SunardyNo ratings yet
- New EM5Document35 pagesNew EM5Yash GuptaNo ratings yet
- Bode Plot Bds 26 3 2015 PDFDocument148 pagesBode Plot Bds 26 3 2015 PDFNikhil PatwariNo ratings yet
- 351 - 27435 - EE411 - 2015 - 1 - 1 - 1 - 0 5 EE411 Lec10 Nyquist - PlotDocument16 pages351 - 27435 - EE411 - 2015 - 1 - 1 - 1 - 0 5 EE411 Lec10 Nyquist - PlotOhmsakthi Vel RNo ratings yet
- Chapter 09 Frequency Response MethodDocument62 pagesChapter 09 Frequency Response MethodFatih TokgözNo ratings yet
- Nyquist PlotDocument28 pagesNyquist PlotLloyds RajaNo ratings yet
- Seminar 9 PDFDocument1 pageSeminar 9 PDFRaya Najiba TroyeeNo ratings yet
- Objectives: Chapter 3: Feedback Control System CharacteristicsDocument17 pagesObjectives: Chapter 3: Feedback Control System CharacteristicsKota divyasreeNo ratings yet
- Lesson Plan: S.N Date Planne D Topics Date Engage D Remark SDocument28 pagesLesson Plan: S.N Date Planne D Topics Date Engage D Remark SVARUN B MNo ratings yet
- CH5-Frequency Response PDFDocument27 pagesCH5-Frequency Response PDFRidir ZolkefleNo ratings yet
- Chapter 2 - Signals and Signal SpaceDocument38 pagesChapter 2 - Signals and Signal SpaceIBRAHIM ALFARIS100% (1)
- Regulation and Control: by Tewedage SileshiDocument12 pagesRegulation and Control: by Tewedage SileshihermelaNo ratings yet
- Unit-4-1 PPT CSDocument78 pagesUnit-4-1 PPT CS20R25A0420 KONDAMUDI VAMSI ANURAGNo ratings yet
- Note - 9 Frequency ResponseDocument10 pagesNote - 9 Frequency ResponseDilip GNo ratings yet
- Frequency Response AnalysisDocument94 pagesFrequency Response AnalysisaniketNo ratings yet
- Bode PlotDocument35 pagesBode PlotAbcdNo ratings yet
- Lecture - 23 Industrial Control PDFDocument11 pagesLecture - 23 Industrial Control PDF287 JatinNo ratings yet
- EMS507 Lecture 6 - Frequency AnalysisDocument23 pagesEMS507 Lecture 6 - Frequency Analysis124ll124No ratings yet
- Frequency Response Techniques Contd......Document9 pagesFrequency Response Techniques Contd......arifulNo ratings yet
- Regulation and Control: by Tewedage SileshiDocument16 pagesRegulation and Control: by Tewedage SileshihermelaNo ratings yet
- Liu Et Al-2018-Journal of Applied Econometrics - Sup-1Document9 pagesLiu Et Al-2018-Journal of Applied Econometrics - Sup-1Grant HeilemanNo ratings yet
- Control 2 Lec4Document13 pagesControl 2 Lec4Ahmed YounisNo ratings yet
- Lineas de Transmision PropagacionDocument30 pagesLineas de Transmision PropagacionAlexis PatricioNo ratings yet
- CHP 4Document104 pagesCHP 4million shiferawNo ratings yet
- Frequency Response Analysis: Section 6Document45 pagesFrequency Response Analysis: Section 6Ahmed HassanNo ratings yet
- Lecture38 PDFDocument5 pagesLecture38 PDFNiyas PNo ratings yet
- Gain and Phase MarginsDocument5 pagesGain and Phase MarginsamitkallerNo ratings yet
- Seed Synthetic and Artificial MotionDocument56 pagesSeed Synthetic and Artificial Motionlimara65No ratings yet
- Frequency Responses: Signals and System AnalysisDocument33 pagesFrequency Responses: Signals and System AnalysisPrinceNo ratings yet
- Dada La Señal No Periódica G (T)Document27 pagesDada La Señal No Periódica G (T)Marko Chambi ColqueNo ratings yet
- Chapter 3 - Stability of Control SystemDocument99 pagesChapter 3 - Stability of Control SystemTân NguyễnNo ratings yet
- CH-7 Torsion TheoryDocument16 pagesCH-7 Torsion Theoryمحمد خريبطNo ratings yet
- 05 Fourier Transform SpectrumDocument8 pages05 Fourier Transform SpectrumPesce Tech symposiumNo ratings yet
- The Nyquist Plot A Frequency Response Analysis TechniqueDocument33 pagesThe Nyquist Plot A Frequency Response Analysis TechniqueRajendra ThamerciNo ratings yet
- Bode Plot FiguresDocument11 pagesBode Plot Figuresiamketul6340No ratings yet
- Rangoli Book 3Document8 pagesRangoli Book 3iamketul6340No ratings yet
- List of Some Indian StandardsDocument3 pagesList of Some Indian Standardsiamketul6340No ratings yet
- Rules For Root Locus PlotDocument1 pageRules For Root Locus Plotiamketul6340No ratings yet
- Transformer TestingDocument33 pagesTransformer Testingiamketul6340No ratings yet
- All India Installed Capacity (In MW) of Power StationsDocument7 pagesAll India Installed Capacity (In MW) of Power Stationspawan kumar raiNo ratings yet
- Certification and Learning Materials For On-Line WorkshopsDocument13 pagesCertification and Learning Materials For On-Line WorkshopsSIVASAKTHI T0% (1)
- PipedoitDocument1 pagePipedoitiamketul6340No ratings yet
- Charge-Carrier Drift in SemiconductorsDocument29 pagesCharge-Carrier Drift in Semiconductorsiamketul6340No ratings yet
- Medical Certificate FormatDocument1 pageMedical Certificate Formatiamketul6340No ratings yet
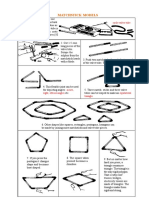
- Matchstick Me Can No Do ItDocument3 pagesMatchstick Me Can No Do Itiamketul6340No ratings yet
- 2 12+spot+the+difference PDFDocument2 pages2 12+spot+the+difference PDFtyuioNo ratings yet
- GEDA Inverter ManualDocument79 pagesGEDA Inverter Manualiamketul6340No ratings yet
- Rainfall 2016 TotalDocument4 pagesRainfall 2016 Totaliamketul63400% (1)
- Finnish Education in A Nutshell PDFDocument28 pagesFinnish Education in A Nutshell PDFNova Debi WicaksonoNo ratings yet
- Mechanical Dynamics, The Swing Equation, Units 1.0 PreliminariesDocument30 pagesMechanical Dynamics, The Swing Equation, Units 1.0 PreliminariesjaragumuraNo ratings yet
- Siemens Basics of PLCDocument89 pagesSiemens Basics of PLCAlejandro Cortes Bolados100% (1)
- Power SwingDocument35 pagesPower SwingFatima MirNo ratings yet
- The Secret To Finland's Success: Educating Teachers: o SceDocument8 pagesThe Secret To Finland's Success: Educating Teachers: o SceMelissa WalshNo ratings yet
- Multiple-Choice Questions: Revision On Networks 2 QuestionsDocument29 pagesMultiple-Choice Questions: Revision On Networks 2 Questionsiamketul6340No ratings yet
- Mechanical Dynamics, The Swing Equation, Units 1.0 PreliminariesDocument30 pagesMechanical Dynamics, The Swing Equation, Units 1.0 PreliminariesjaragumuraNo ratings yet
- PSCAD Assignment - IIDocument9 pagesPSCAD Assignment - IIiamketul6340No ratings yet
- PSOC Question BankDocument17 pagesPSOC Question Bankiamketul6340No ratings yet
- How I Chose The Best Mutual FundDocument6 pagesHow I Chose The Best Mutual Fundiamketul6340No ratings yet
- Assignment - Iv Examples of Design of Transformer: W 2 M 2 T W WDocument1 pageAssignment - Iv Examples of Design of Transformer: W 2 M 2 T W Wiamketul6340No ratings yet
- HydropowerplantDocument20 pagesHydropowerplantbalajikundetiNo ratings yet
- Issues in Teacher EducationDocument42 pagesIssues in Teacher Educationiamketul6340No ratings yet
- 7th Pay1Document5 pages7th Pay1iamketul6340No ratings yet
- Mathematics Similar Triangles 8 EngDocument35 pagesMathematics Similar Triangles 8 Engsbk4756No ratings yet
- Hwa Chong Institution (High School Section) Subject: Mathematics Level: Sec 2 IP/SBGE 2012 Scheme of WorkDocument27 pagesHwa Chong Institution (High School Section) Subject: Mathematics Level: Sec 2 IP/SBGE 2012 Scheme of WorkLim Kew ChongNo ratings yet
- 1 Eutiquio C Young Partial Differential Equations An Introduction Allyn and Bacon 1972Document357 pages1 Eutiquio C Young Partial Differential Equations An Introduction Allyn and Bacon 1972Jefferson33% (3)
- Design Anlaysis of Cantilever BeamDocument6 pagesDesign Anlaysis of Cantilever BeamDannyDurhamNo ratings yet
- Spe 102240 MS PDFDocument6 pagesSpe 102240 MS PDFrarahahaNo ratings yet
- Mathematics-Optional: by Venkanna Sir and Satya Sir PDE 2013-2019Document6 pagesMathematics-Optional: by Venkanna Sir and Satya Sir PDE 2013-2019Kriti ChoudharyNo ratings yet
- Analog & Digital Electronics: Course Instructor: Course InstructorDocument9 pagesAnalog & Digital Electronics: Course Instructor: Course InstructorPriyesh PandeyNo ratings yet
- Algebraic ExpressionsDocument51 pagesAlgebraic ExpressionssuhailaNo ratings yet
- Indian Mathematics HistoryDocument29 pagesIndian Mathematics Historyapi-3719538100% (3)
- Chapter 6.production and Business OrganizationDocument2 pagesChapter 6.production and Business Organizationfrances leana capellan100% (1)
- 80 89Document10 pages80 89Ahmad Al-QawasimiNo ratings yet
- 3.design of Pile Foundations Using EC 7 - Prof - ThilakasiriDocument70 pages3.design of Pile Foundations Using EC 7 - Prof - ThilakasiriefackopaNo ratings yet
- Sieve Analysis Methods and Interpretations - ReavisDocument54 pagesSieve Analysis Methods and Interpretations - Reavissindalisindi100% (1)
- The Whetstone of WitteDocument332 pagesThe Whetstone of Wittejon.ingramNo ratings yet
- Reference BookDocument1 pageReference BookAnkita Priyadarsini0% (1)
- 5e Lessons Stem States of MatterDocument9 pages5e Lessons Stem States of Matterapi-250608665No ratings yet
- Ch03 Sample Test QuestionsDocument5 pagesCh03 Sample Test QuestionsEmmanuel Peña FloresNo ratings yet
- Stage 1 Stage 2 Stage 3Document3 pagesStage 1 Stage 2 Stage 3Matt Julius CorpuzNo ratings yet
- The Origin and Present Status of Fick's Diffusion LawDocument4 pagesThe Origin and Present Status of Fick's Diffusion LawDiiego RodriguezNo ratings yet
- Chapter 15 ProbabilityDocument41 pagesChapter 15 Probabilityrishab13572468No ratings yet
- Classwork and Homework FormatDocument3 pagesClasswork and Homework FormatIsrafil TamimNo ratings yet
- Assebly Lab PrintDocument19 pagesAssebly Lab PrintPRATIK_DARBHE100% (2)
- Cramer JohnDocument59 pagesCramer JohnClifford StoneNo ratings yet
- Iytl4 9w7emDocument158 pagesIytl4 9w7emSwami AbhayanandNo ratings yet
- Dokumen - Tips Ipec Scholarship Cum Admission Test For Class Xi For Xi Exam Sample PaperDocument14 pagesDokumen - Tips Ipec Scholarship Cum Admission Test For Class Xi For Xi Exam Sample PaperAbhishek KumarNo ratings yet
- Descartes, René - Philosophical Writings, Vol. 1 (Cambridge, 1985)Document429 pagesDescartes, René - Philosophical Writings, Vol. 1 (Cambridge, 1985)Manuel Moncada100% (5)
- Self-Instructional Manual (SIM) For Self-Directed Learning (SDL) Authors: Engr. Richard Regidor Engr. Esther Consuelo TanDocument35 pagesSelf-Instructional Manual (SIM) For Self-Directed Learning (SDL) Authors: Engr. Richard Regidor Engr. Esther Consuelo TanArlene PolinarNo ratings yet
- Mat303 - Probabilty and Random ProcessesDocument3 pagesMat303 - Probabilty and Random ProcessesChandra PrriyanNo ratings yet