You might also like
- LCS Unit-4Document16 pagesLCS Unit-4Rajasekhar AtlaNo ratings yet
- Module 2 - 2Document68 pagesModule 2 - 2abcdNo ratings yet
- EE2 SignalsComms SCEE08007 Datasheet 2014 Complete PDFDocument6 pagesEE2 SignalsComms SCEE08007 Datasheet 2014 Complete PDFErica StevensNo ratings yet
- Frequency Response AnalysisDocument8 pagesFrequency Response AnalysisFaizal Bin IbrahimNo ratings yet
- Accelerometer Frequency Response AnalysisDocument4 pagesAccelerometer Frequency Response AnalysisTrung PhanNo ratings yet
- Control Engineering Frequency Response AnalysisDocument27 pagesControl Engineering Frequency Response AnalysisRidir ZolkefleNo ratings yet
- R(S) C(S)Document16 pagesR(S) C(S)Ananthan SrijithNo ratings yet
- Freq ResponseDocument23 pagesFreq Responselili aboudNo ratings yet
- Lecture38 PDFDocument5 pagesLecture38 PDFNiyas PNo ratings yet
- Gain and Phase MarginsDocument5 pagesGain and Phase MarginsamitkallerNo ratings yet
- Control Systems Formula SheetDocument12 pagesControl Systems Formula SheetliamhrNo ratings yet
- Lecture - Nichols - Chart PDFDocument13 pagesLecture - Nichols - Chart PDFJazzy BieberNo ratings yet
- Log-Magnitude Vs Phase PlotDocument13 pagesLog-Magnitude Vs Phase PlotJazzy BieberNo ratings yet
- NMB34203 - ch6 - Frequency Response (Bode Plot)Document45 pagesNMB34203 - ch6 - Frequency Response (Bode Plot)fatinNo ratings yet
- ME 3281 Spring 2013 Prof Rajamani Step Response Impulse ResponseDocument3 pagesME 3281 Spring 2013 Prof Rajamani Step Response Impulse ResponseAkashNo ratings yet
- ME 3281 Spring 2013 Prof Rajamani Step Response Impulse ResponseDocument3 pagesME 3281 Spring 2013 Prof Rajamani Step Response Impulse ResponseAkashNo ratings yet
- Frequency Response Analysis Bode PlotsDocument76 pagesFrequency Response Analysis Bode PlotsSudhanshu Singh0% (1)
- Frequency Response Analysis & Control System Design: CHME 624 Advance Process Dynamic Modelling & ControlDocument25 pagesFrequency Response Analysis & Control System Design: CHME 624 Advance Process Dynamic Modelling & Controlali aljifriNo ratings yet
- Frequency ResponseDocument9 pagesFrequency ResponseAnanda RamanNo ratings yet
- GRAPHICAL REPRESENTATION OF TRANSFER FUNCTIONSDocument20 pagesGRAPHICAL REPRESENTATION OF TRANSFER FUNCTIONSFrancesco DonatoNo ratings yet
- 2010 SolutionsDocument2 pages2010 SolutionsTest EmailNo ratings yet
- Y T Y S: Lim LimDocument3 pagesY T Y S: Lim LimNicklas ReusNo ratings yet
- Last Name: Analog Electronics Equation SheetDocument1 pageLast Name: Analog Electronics Equation SheetGautam KumarNo ratings yet
- DYNAMICS OF ROTATING MACHINES: KEY CONCEPTS AND FORMULASDocument116 pagesDYNAMICS OF ROTATING MACHINES: KEY CONCEPTS AND FORMULASHassen M OuakkadNo ratings yet
- Bus Loss Matrix Power Flow AnalysisDocument1 pageBus Loss Matrix Power Flow AnalysisJonathanChiluisaNo ratings yet
- Derivation of Peak TimeDocument1 pageDerivation of Peak TimeIman SatriaNo ratings yet
- Automatic Control Systems 9th Solution (WWW - Konkur.in)Document948 pagesAutomatic Control Systems 9th Solution (WWW - Konkur.in)Negar SatvatNo ratings yet
- Derivation of the Transmissibility Ratio Equation for a Single Degree of Freedom SystemDocument2 pagesDerivation of the Transmissibility Ratio Equation for a Single Degree of Freedom SystemCyruz LapinasNo ratings yet
- 9781107059320-SOLUTIONS Essential Digital SolutionsDocument47 pages9781107059320-SOLUTIONS Essential Digital SolutionsGulrez MNo ratings yet
- Lecture 14Document35 pagesLecture 14AhsabNo ratings yet
- CSE 101 Homework 0 Solutions: Winter 2021Document2 pagesCSE 101 Homework 0 Solutions: Winter 2021Hoang NguyenNo ratings yet
- محاضرة رقم 38Document2 pagesمحاضرة رقم 38Ghazy alshyalNo ratings yet
- HW 4 SolDocument5 pagesHW 4 SolGrant GeorgiaNo ratings yet
- Transform TablesDocument6 pagesTransform TablesNicholas TanNo ratings yet
- MATH 103A Exercises 1: April 8, 2016Document7 pagesMATH 103A Exercises 1: April 8, 2016Anonymous HZfUNUGWzNo ratings yet
- DRM SolutionsDocument116 pagesDRM SolutionsCésar TapiaNo ratings yet
- C) Elementul de Întârziere de Ordinul 2 (T) : GJ J J RDocument18 pagesC) Elementul de Întârziere de Ordinul 2 (T) : GJ J J RmihalcutzzzNo ratings yet
- Response Terhadap Gaya Eksitasi Harmonik (Lanjutan) : Getaran Mekanik STT MandalaDocument18 pagesResponse Terhadap Gaya Eksitasi Harmonik (Lanjutan) : Getaran Mekanik STT MandalasuryamanNo ratings yet
- LCS21 - 46 - Stability MarginsDocument14 pagesLCS21 - 46 - Stability Marginsgosek16375No ratings yet
- Lagrangian Dynamics HomeworkDocument10 pagesLagrangian Dynamics HomeworkAnyiNo ratings yet
- 08 Frequency Response Methods MechDocument21 pages08 Frequency Response Methods MechMamodiNo ratings yet
- Polar Plot of Frequency ResponseDocument5 pagesPolar Plot of Frequency ResponseDilip GNo ratings yet
- C) Elementul de Întârziere de Ordinul 2 (T) : GJ J JDocument18 pagesC) Elementul de Întârziere de Ordinul 2 (T) : GJ J JBogdan GaldauNo ratings yet
- Notes Tee602 Polar PlotDocument33 pagesNotes Tee602 Polar PlottansnvarmaNo ratings yet
- EEE 3153 Control System Frequency Response Analysis and Bode PlotDocument56 pagesEEE 3153 Control System Frequency Response Analysis and Bode PlotShojeb ShojolNo ratings yet
- Convergence Region Questions and Answers - SanfoundryDocument11 pagesConvergence Region Questions and Answers - SanfoundrykshambelmekuyeNo ratings yet
- Property Periodic Signal Fourier Series Coefficients: k=−∞ k jkω t k=−∞ k jk (2π/T) tDocument11 pagesProperty Periodic Signal Fourier Series Coefficients: k=−∞ k jkω t k=−∞ k jk (2π/T) tAdrián Amor MartínNo ratings yet
- Understanding Bode Diagrams and Control System Stability Using Frequency Domain AnalysisDocument24 pagesUnderstanding Bode Diagrams and Control System Stability Using Frequency Domain AnalysisKhuleedShaikhNo ratings yet
- 2014 EE 121 - Assigment1Document2 pages2014 EE 121 - Assigment1anon_730139085No ratings yet
- Tutorial6 SolDocument4 pagesTutorial6 Soldhindsaharmanjatt2003No ratings yet
- Automatic Control System Solutions Ch1 - Ch6Document404 pagesAutomatic Control System Solutions Ch1 - Ch6Mukesh SharmaNo ratings yet
- Fourier SeriesDocument3 pagesFourier SeriesRaj Economist100% (1)
- Normal DistributionDocument4 pagesNormal DistributiondidiaodeqqNo ratings yet
- EC331 M1 SolutionDocument2 pagesEC331 M1 SolutionBushra MamoudNo ratings yet
- Harmonic 1Document41 pagesHarmonic 1Renny BalaNo ratings yet
- WordDocument8 pagesWordQuran HolyNo ratings yet
- HW 6 SolDocument9 pagesHW 6 Solaquamaster200No ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Deep GrooveDocument3 pagesDeep GrooveaniketNo ratings yet
- Din 1.0619Document1 pageDin 1.0619aniketNo ratings yet
- Stillon Sanitary Valves CatalogueDocument12 pagesStillon Sanitary Valves CatalogueaniketNo ratings yet
- ICICI Pru Signature plan investment and maturity benefitsDocument6 pagesICICI Pru Signature plan investment and maturity benefitsSneha Abhash SinghNo ratings yet
- PRCA S2 T - DatasheetDocument4 pagesPRCA S2 T - DatasheetaniketNo ratings yet
- DFGHDocument4 pagesDFGHaniketNo ratings yet
- Electric Linear Actuators New ITL (20180105-1)Document9 pagesElectric Linear Actuators New ITL (20180105-1)aniketNo ratings yet
- Electro Pneumatic Positioner MP-600 SeriesDocument8 pagesElectro Pneumatic Positioner MP-600 SeriesaniketNo ratings yet
- Cover Letter - Aniket PatilDocument1 pageCover Letter - Aniket PatilaniketNo ratings yet
- GBNMDocument1 pageGBNManiketNo ratings yet
- A01110BT2MSDocument1 pageA01110BT2MSaniketNo ratings yet
- MOTO TP TWD 004 Multi Turn RegulatingDocument1 pageMOTO TP TWD 004 Multi Turn RegulatinganiketNo ratings yet
- Drafting SOPDocument7 pagesDrafting SOPaniketNo ratings yet
- Technical Specifications For Single Phase-Quarter Turn Electrical Actuator ApplicationDocument1 pageTechnical Specifications For Single Phase-Quarter Turn Electrical Actuator ApplicationaniketNo ratings yet
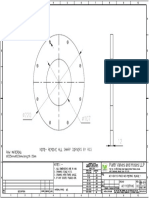
- Quotation (Alt-1) : Parth Valves and Hoses LLPDocument1 pageQuotation (Alt-1) : Parth Valves and Hoses LLPaniketNo ratings yet
- BLV 2.5inch 014 RS PDFDocument1 pageBLV 2.5inch 014 RS PDFaniketNo ratings yet
- 02-Oil Seals-V-Ring PDFDocument18 pages02-Oil Seals-V-Ring PDFrachitmailNo ratings yet
- DJ PCDocument1 pageDJ PCaniketNo ratings yet
- OutlookDocument128 pagesOutlookBianca MariaNo ratings yet
- MAST CalculationDocument4 pagesMAST Calculationaniket100% (3)
- BTFY Keystone Ar1 Ar2Document4 pagesBTFY Keystone Ar1 Ar2tali011971No ratings yet
- A12 A13 Cylinder PDFDocument7 pagesA12 A13 Cylinder PDFaniketNo ratings yet
- Ijsetr Vol 5 Issue 9 2820 2823 PDFDocument4 pagesIjsetr Vol 5 Issue 9 2820 2823 PDFVinothkumarNo ratings yet
- Siw Stud A4 70Document1 pageSiw Stud A4 70aniketNo ratings yet
- List of Standard ProductDocument1 pageList of Standard ProductaniketNo ratings yet
- A12 A13 Cylinder PDFDocument7 pagesA12 A13 Cylinder PDFaniketNo ratings yet
- Standarde Din FlangeDocument45 pagesStandarde Din Flangeadri2No ratings yet
- A 571Document5 pagesA 571aniketNo ratings yet
- List of Standard-1Document1 pageList of Standard-1aniketNo ratings yet
- Kitne PakistanDocument2 pagesKitne PakistanAnkurNo ratings yet
- Ergonomía y Normatividad en 3Document5 pagesErgonomía y Normatividad en 3Rogers DiazNo ratings yet
- Splices: S100 S100 S101 S101 S101 S102Document3 pagesSplices: S100 S100 S101 S101 S101 S102Albert BriceñoNo ratings yet
- Recommended Immunization - Canadian Immunization Guide - Seventh Edition - 2006Document2 pagesRecommended Immunization - Canadian Immunization Guide - Seventh Edition - 2006Maja MudriNo ratings yet
- Hotel Training ReportDocument14 pagesHotel Training ReportButchick Concepcion Malasa100% (1)
- Op Art PresentationDocument17 pagesOp Art PresentationSilvija PećanacNo ratings yet
- Helmut Lethen - Cool Conduct - The Culture of Distance in Weimar Germany (Weimar and Now - German Cultural Criticism) - University of California Press (2001) PDFDocument265 pagesHelmut Lethen - Cool Conduct - The Culture of Distance in Weimar Germany (Weimar and Now - German Cultural Criticism) - University of California Press (2001) PDFJaco CMNo ratings yet
- Coding deCoding class insightsDocument18 pagesCoding deCoding class insightsShalabh Vikram SahuNo ratings yet
- Salon Lesson Plan 233-1Document7 pagesSalon Lesson Plan 233-1api-264569989No ratings yet
- Supply Chain Management A Logistics Perspective 10th Edition Coyle Test BankDocument24 pagesSupply Chain Management A Logistics Perspective 10th Edition Coyle Test BankWilliamLewisiscy100% (38)
- Organic Compounds ExplainedDocument37 pagesOrganic Compounds ExplainedAlejandro VillanuevaNo ratings yet
- Ken Jennings' Junior Genius Guides: Maps and Geography (Excerpt)Document24 pagesKen Jennings' Junior Genius Guides: Maps and Geography (Excerpt)Simon and Schuster100% (2)
- Cardio Fitt Pin PostersDocument5 pagesCardio Fitt Pin Postersapi-385952225No ratings yet
- Itm Guia Rapida Tds 600 Tipo4 Ed1 EspDocument148 pagesItm Guia Rapida Tds 600 Tipo4 Ed1 Espcamel2003No ratings yet
- Michigan English TestDocument22 pagesMichigan English TestLuisFelipeMartínezHerediaNo ratings yet
- StressesDocument61 pagesStressesMuhammad MusaNo ratings yet
- 2Tafseer2019Sep4 17 24oc1 8 29nov5 262020jan7 21F11 18 25Document96 pages2Tafseer2019Sep4 17 24oc1 8 29nov5 262020jan7 21F11 18 25Aroob YaseenNo ratings yet
- Primary Maths Dissertation ExamplesDocument8 pagesPrimary Maths Dissertation ExamplesPaperWritersAlbuquerque100% (1)
- Tadano Hydraulic Rough Terrain Crane TR 350xl 3 560485 Operation Manual 1999 en JPDocument22 pagesTadano Hydraulic Rough Terrain Crane TR 350xl 3 560485 Operation Manual 1999 en JPmarcowens210992apd100% (126)
- The Vatican As A World Power (1939)Document481 pagesThe Vatican As A World Power (1939)sexylove1477No ratings yet
- Social Responsibility and Managerial Ethics (Principles of Management)Document35 pagesSocial Responsibility and Managerial Ethics (Principles of Management)Reader94% (16)
- Class of 2016 Graduate ListsDocument16 pagesClass of 2016 Graduate ListscallertimesNo ratings yet
- DBMS Notes For BCADocument9 pagesDBMS Notes For BCAarndm8967% (6)
- Communalism in India - Causes, Incidents and MeasuresDocument5 pagesCommunalism in India - Causes, Incidents and Measures295Sangita PradhanNo ratings yet
- Does Cash App Have Business Accounts - Google SeaDocument1 pageDoes Cash App Have Business Accounts - Google SeaAdedayo CrownNo ratings yet
- 3.19 Passive VoiceDocument10 pages3.19 Passive VoiceRetno RistianiNo ratings yet
- 202-Nido 2024Document27 pages202-Nido 2024tabhonor69No ratings yet
- Test 5 Trig Functions 21Document4 pagesTest 5 Trig Functions 21Isabelle Dos SantosNo ratings yet
- UT Dallas Syllabus For Se2370.501 05s Taught by Weichen Wong (Wew021000)Document1 pageUT Dallas Syllabus For Se2370.501 05s Taught by Weichen Wong (Wew021000)UT Dallas Provost's Technology GroupNo ratings yet
- Typical Specification of Volvo Truck PDFDocument3 pagesTypical Specification of Volvo Truck PDFKartik BehereNo ratings yet