You might also like
- Instruction Manual & Observation Book: Clrr10-Applied Electrical and Electronics Engineering LaboratoryDocument9 pagesInstruction Manual & Observation Book: Clrr10-Applied Electrical and Electronics Engineering LaboratoryAditi PatilNo ratings yet
- Precision Timer: Connection DiagramDocument5 pagesPrecision Timer: Connection DiagramValentin RaduNo ratings yet
- Ordem de Graduação RELÉ SEL 351-6: Relay Identifier Terminal IdDocument14 pagesOrdem de Graduação RELÉ SEL 351-6: Relay Identifier Terminal IdReinan AssisNo ratings yet
- Load Test On D.C. Series MotorDocument5 pagesLoad Test On D.C. Series Motorramniwas123No ratings yet
- Avrcf12a PDFDocument2 pagesAvrcf12a PDFduaNo ratings yet
- Exp No: 1 Load Test On DC Shunt MotorDocument7 pagesExp No: 1 Load Test On DC Shunt MotorjascnjNo ratings yet
- Gavr 12Document2 pagesGavr 12Nasredine Alain0% (2)
- EA EA EA EA66661FC 1FC 1FC 1FC2222 - F F F F: TypeDocument5 pagesEA EA EA EA66661FC 1FC 1FC 1FC2222 - F F F F: TypeAhmed Sherif CupoNo ratings yet
- GAVR15Document2 pagesGAVR15HerbertNo ratings yet
- REZ1Document1 pageREZ1Vinod KumarNo ratings yet
- !Jaiil-Pa311: Voltage ComparatorsDocument5 pages!Jaiil-Pa311: Voltage ComparatorsArunNo ratings yet
- SJPW-T4-Sanken Diodo de DronDocument6 pagesSJPW-T4-Sanken Diodo de DronIvan ZuñigaNo ratings yet
- Test Reherseal PowerDocument7 pagesTest Reherseal PowerBs BarbarianNo ratings yet
- SMLJ Transient Voltage Suppressor Diode Series: Features ApplicationsDocument5 pagesSMLJ Transient Voltage Suppressor Diode Series: Features Applicationsmgkdsfg lgfhNo ratings yet
- Regulador de Voltaje GAVR8AhDocument2 pagesRegulador de Voltaje GAVR8AhcrecosiroNo ratings yet
- MYDocument64 pagesMYAjay KumarNo ratings yet
- EDA (MCT) Lab ManualDocument32 pagesEDA (MCT) Lab ManualThanigaigriezmann GkNo ratings yet
- cd214b ObsoleteDocument6 pagescd214b Obsoletemeteor70446No ratings yet
- Gavr 8aDocument2 pagesGavr 8aTomeo GarciaNo ratings yet
- Gavr 8aDocument2 pagesGavr 8aHama AieaNo ratings yet
- TSU05A60Document5 pagesTSU05A60davidNo ratings yet
- AMADA METRECS 3 Axis DC Drive DSC-03ATA-1Document1 pageAMADA METRECS 3 Axis DC Drive DSC-03ATA-1raviNo ratings yet
- RK 49 - Ds - en PDFDocument5 pagesRK 49 - Ds - en PDFPedro Javier Castro SanchezNo ratings yet
- DCvs ACBrushlessDocument9 pagesDCvs ACBrushlesspeluza2000No ratings yet
- Three Phase IMDocument17 pagesThree Phase IMmohamedNo ratings yet
- OnSemi The TL431 in The Control of Switching Power Supplies PDFDocument63 pagesOnSemi The TL431 in The Control of Switching Power Supplies PDFFernando BotteronNo ratings yet
- Synchronous K-NotesDocument11 pagesSynchronous K-Notesomkar budigeNo ratings yet
- EN TXD-N YDocument2 pagesEN TXD-N Ywahyu purnomoNo ratings yet
- 1 - Rectifier Diode PDFDocument7 pages1 - Rectifier Diode PDFYaraNo ratings yet
- Brake Test On DC Shunt MachineDocument9 pagesBrake Test On DC Shunt MachineNagendrababu VasaNo ratings yet
- EA08A-WG (Manual) Rev.2Document10 pagesEA08A-WG (Manual) Rev.2Daiane MendesNo ratings yet
- 9n90b 9n90cDocument7 pages9n90b 9n90cSunil KumarNo ratings yet
- TransformerDocument53 pagesTransformerFelly AntaNo ratings yet
- NJS5 Time Relay: Control Relay Control RelayDocument2 pagesNJS5 Time Relay: Control Relay Control RelayFadi HasnNo ratings yet
- Taiwan Semiconductor Small Signal Product: FeaturesDocument4 pagesTaiwan Semiconductor Small Signal Product: FeaturesahmadNo ratings yet
- Eee3091F: Energy Conversion Induction Machines II (Chapter 5 - PC Sen)Document29 pagesEee3091F: Energy Conversion Induction Machines II (Chapter 5 - PC Sen)Yousuf IsaacsNo ratings yet
- 31DF4 31DF4 31DF4 31DF4: Type Type Type TypeDocument5 pages31DF4 31DF4 31DF4 31DF4: Type Type Type TypeAndré Frota PaivaNo ratings yet
- Application Note 85 August 2000 Low Noise Varactor Biasing With Switching RegulatorsDocument24 pagesApplication Note 85 August 2000 Low Noise Varactor Biasing With Switching RegulatorsthespNo ratings yet
- DatasheetDocument4 pagesDatasheetGrupo EpufmNo ratings yet
- Hitachi - PDE MDM900E17D 5Document8 pagesHitachi - PDE MDM900E17D 5mSmallNo ratings yet
- Datasheet - HK P4na80fi 885893Document10 pagesDatasheet - HK P4na80fi 885893Alexim MihaiNo ratings yet
- Motor Name Plate: Insulation Duty CycleDocument12 pagesMotor Name Plate: Insulation Duty CycleFerdin JishanNo ratings yet
- L-4 (DK) (Pe) ( (Ee) Nptel) 4Document5 pagesL-4 (DK) (Pe) ( (Ee) Nptel) 4GagneNo ratings yet
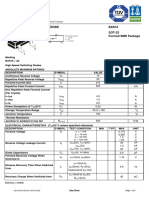
- Silicon Planar Switching Diode BAS16 SOT-23 Formed SMD PackageDocument3 pagesSilicon Planar Switching Diode BAS16 SOT-23 Formed SMD PackageE-RegisNo ratings yet
- Testing of Relays and Detailed ProcedureDocument30 pagesTesting of Relays and Detailed Proceduresetyo nugrohoNo ratings yet
- Niko-Sem: Universal Switching BufferDocument8 pagesNiko-Sem: Universal Switching Bufferroger5858No ratings yet
- WPS & PQR Review Check List: Asme Sec. Ix Ed.2007Document2 pagesWPS & PQR Review Check List: Asme Sec. Ix Ed.2007KyNo ratings yet
- KA3842Document7 pagesKA3842QXNNo ratings yet
- Ed N OscillatorDocument2 pagesEd N OscillatormasoudNo ratings yet
- WPS Variables Asme IX 2019Document2 pagesWPS Variables Asme IX 2019RedzuanNo ratings yet
- EEE2003 - Electromechanical Energy Conversion Lab: School of Electrical EngineeringDocument9 pagesEEE2003 - Electromechanical Energy Conversion Lab: School of Electrical EngineeringAkshit VSNo ratings yet
- Mbd4448Haqw/Hadw/Hcdw/Hsdw/Htw: Taiwan Semiconductor Small Signal ProductDocument4 pagesMbd4448Haqw/Hadw/Hcdw/Hsdw/Htw: Taiwan Semiconductor Small Signal ProductAlfa PumpsNo ratings yet
- 1N4001, 1N4002, 1N4003, 1N4004, 1N4005, 1N4006, 1N4007 Axial Lead Standard Recovery RectifiersDocument5 pages1N4001, 1N4002, 1N4003, 1N4004, 1N4005, 1N4006, 1N4007 Axial Lead Standard Recovery RectifiersEdddNo ratings yet
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2From EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2No ratings yet
- Product Data Sheet: Circuit Breaker Compact NS2500N 2500 A - 4 Poles - Fixed - Without Trip UnitDocument2 pagesProduct Data Sheet: Circuit Breaker Compact NS2500N 2500 A - 4 Poles - Fixed - Without Trip UnitRenato AbalosNo ratings yet
- Exit PreparationDocument92 pagesExit PreparationERMIAS AmanuelNo ratings yet
- Bi Toroid Transformer DiscussionDocument781 pagesBi Toroid Transformer DiscussionLuisLazoNo ratings yet
- 3RT1054 1ap36Document5 pages3RT1054 1ap36Rusty AllenNo ratings yet
- Starting Method of 3-Phase Induction MotorDocument4 pagesStarting Method of 3-Phase Induction MotorRajith Gamage100% (2)
- Supplementary Notes For Duo-Bias Differential Protection For TransformersDocument3 pagesSupplementary Notes For Duo-Bias Differential Protection For TransformersHok Kwun LauNo ratings yet
- Installation Instructions For 10400 Universal Wiring HarnessDocument16 pagesInstallation Instructions For 10400 Universal Wiring HarnessGasdiesel MechanicNo ratings yet
- Measuring Gigaohms With A Simple MultimeterDocument11 pagesMeasuring Gigaohms With A Simple MultimeterZIASY Shesmer100% (1)
- Silcon 10-40kw Installation enDocument90 pagesSilcon 10-40kw Installation enAndré Luiz Fraga de OliveiraNo ratings yet
- Digital MultimeterDocument5 pagesDigital MultimeterFerdinand EstanislaoNo ratings yet
- Basic Conductor Sizing Part 2Document11 pagesBasic Conductor Sizing Part 2erson1981No ratings yet
- STB5100 Electric Wiring DiagramDocument10 pagesSTB5100 Electric Wiring Diagramsea13100% (2)
- Impedance MeasurementDocument2 pagesImpedance MeasurementAhsan KaziNo ratings yet
- Item Description Required by Supplier: Data Sheets: MV / LV TransformersDocument1 pageItem Description Required by Supplier: Data Sheets: MV / LV TransformersessamNo ratings yet
- (NPN) S8050Document2 pages(NPN) S8050Trần LinhNo ratings yet
- fr150 Series User Manual en v1.2Document131 pagesfr150 Series User Manual en v1.2Hendrewel Ferreira NunesNo ratings yet
- High Speed Transistor Optocouplers - HP2530Document14 pagesHigh Speed Transistor Optocouplers - HP2530Lucía MitchellNo ratings yet
- Metal Detector HomemadeDocument7 pagesMetal Detector HomemadeCoevic100% (1)
- Screened Cable and Data Cable Segregation: CCS Technical Information Consultant Programme - Electrical DistancesDocument4 pagesScreened Cable and Data Cable Segregation: CCS Technical Information Consultant Programme - Electrical Distancescuongpham301No ratings yet
- Techno-Diagram f2 6-2Document30 pagesTechno-Diagram f2 6-2patrijuvetNo ratings yet
- Single-Phase Half - Controlled (Semiconverter) RectifierDocument11 pagesSingle-Phase Half - Controlled (Semiconverter) RectifierDeepak YugaNo ratings yet
- Start: Soldering - Solderen - Soudage - Löten - Soldadura - Lödning - Juottami Nen - Saldatura - SoldaDocument1 pageStart: Soldering - Solderen - Soudage - Löten - Soldadura - Lödning - Juottami Nen - Saldatura - SoldaGABRIEL MNo ratings yet
- SUN2000-115kTL-M2 DatasheetDocument2 pagesSUN2000-115kTL-M2 DatasheetFranckNo ratings yet
- University of Engineering & Technology LahoreDocument12 pagesUniversity of Engineering & Technology LahoreRana FaizanNo ratings yet
- General Catalogue: Technical Features DocumentationDocument1 pageGeneral Catalogue: Technical Features DocumentationCalin BogdanNo ratings yet
- Chapter 4 - IC RegulatorsDocument20 pagesChapter 4 - IC RegulatorsanshikahjjpNo ratings yet
- Ir 2151Document6 pagesIr 2151RintheGreatNo ratings yet
- 21-PS Iec 62040-3-2013 - FinalDocument102 pages21-PS Iec 62040-3-2013 - FinalMaLik AtifNo ratings yet
- PQ Series PG 1MDB08202-YN ENaDocument8 pagesPQ Series PG 1MDB08202-YN ENaAUHEBEZNo ratings yet