You might also like
- Auto 4HP16 (0 30)Document31 pagesAuto 4HP16 (0 30)Jose David Huanca Taype67% (3)
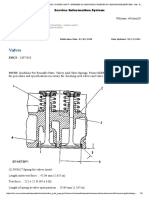
- Valves: Previous ScreenDocument3 pagesValves: Previous ScreenSeider DcNo ratings yet
- JCBDocument8 pagesJCBKocic BalicevacNo ratings yet
- Semi-Active Suspension Control Design for VehiclesFrom EverandSemi-Active Suspension Control Design for VehiclesRating: 5 out of 5 stars5/5 (1)
- Robot KinematicsDocument84 pagesRobot KinematicsElumalai BoominathanNo ratings yet
- LG Tromm Washing Machine Front Load Training Manual 2008Document112 pagesLG Tromm Washing Machine Front Load Training Manual 2008Salma Avila75% (8)
- Ajustes Trans 140GDocument13 pagesAjustes Trans 140GDomingo Cruz Garcia100% (3)
- Quad Copter PresentationDocument19 pagesQuad Copter Presentationjunaid 786No ratings yet
- Spec DH658 135M M95DDocument19 pagesSpec DH658 135M M95Dflashtron100% (1)
- AHRLACDocument18 pagesAHRLACVictor Pileggi100% (1)
- GTZZ25J Technical OfferDocument24 pagesGTZZ25J Technical OfferPATRICIO FERNANDO MUÑOZ MORENO100% (2)
- ANSYS Modal AnalysisDocument40 pagesANSYS Modal AnalysisDesmond Chang100% (1)
- C EpopsDocument695 pagesC EpopsTom DavisonNo ratings yet
- Simpack Wind 2010 Swe LoadsimulationsDocument26 pagesSimpack Wind 2010 Swe LoadsimulationsRamon Gutierrez100% (1)
- Volvo Reva40dspecDocument6 pagesVolvo Reva40dspecIzzan Ferdi Andrian0% (1)
- Understanding Low Voltage Power Distribution SystemsDocument64 pagesUnderstanding Low Voltage Power Distribution SystemsJorge Luis Mallqui Barbaran100% (1)
- SCC500EDocument32 pagesSCC500Eardane100% (1)
- AB-522 Standard Pneumatic Test Procedure RequirementsDocument16 pagesAB-522 Standard Pneumatic Test Procedure RequirementsShank HackerNo ratings yet
- Lynx 220 Series EnglishDocument20 pagesLynx 220 Series EnglishFerney AlexisNo ratings yet
- Design of WHEELCHAIR PPT FinalDocument32 pagesDesign of WHEELCHAIR PPT FinalSaravanan kNo ratings yet
- Operation+Manual English 1Document41 pagesOperation+Manual English 1phoenix6048No ratings yet
- Cat GKR Gks Gss MH 15593811 en GBDocument324 pagesCat GKR Gks Gss MH 15593811 en GBdavidNo ratings yet
- Group 15 EMD332 Machine Design Report - 2D Camera SliderDocument33 pagesGroup 15 EMD332 Machine Design Report - 2D Camera SliderMark SelvanNo ratings yet
- Pneumobot: Sprue Picker RobotDocument37 pagesPneumobot: Sprue Picker RobotAlfandel VillamartinNo ratings yet
- TH551 Tekninen Datasheet LRDocument6 pagesTH551 Tekninen Datasheet LRMegustas MuchoNo ratings yet
- Broder SonDocument6 pagesBroder SonNiviaRodriguesNo ratings yet
- ED391901Document339 pagesED391901memito48No ratings yet
- 2DXL Super Loader Spec SheetDocument2 pages2DXL Super Loader Spec SheetChu YanNo ratings yet
- ACCELEROMETER Gesture Controlled WheelchairDocument24 pagesACCELEROMETER Gesture Controlled Wheelchairamarshirodkar23100% (1)
- New Text DocumentDocument6 pagesNew Text DocumentsadsdNo ratings yet
- India Road Traffic SignsDocument17 pagesIndia Road Traffic Signsjivan tidakeNo ratings yet
- Chapter 7Document39 pagesChapter 7SayeedIshtiaqueNo ratings yet
- Archetype Final PresentationDocument34 pagesArchetype Final Presentationh2ucd2014No ratings yet
- 2DXL Super Loader BrochureDocument8 pages2DXL Super Loader BrochureJayant Kushwaha0% (1)
- X 110Document107 pagesX 110JimNo ratings yet
- Lecture ModalDocument39 pagesLecture ModalSargunam Sankaravadivel100% (1)
- 3CXCDocument8 pages3CXCragkaraNo ratings yet
- Hydraulic Excavator: Model Code Engine Rated Power Operating Weight Backhoe BucketDocument8 pagesHydraulic Excavator: Model Code Engine Rated Power Operating Weight Backhoe Bucketidar100% (3)
- JCB Tracked Robot Loaders 190T1110TDocument6 pagesJCB Tracked Robot Loaders 190T1110TFajrin M. NatsirNo ratings yet
- NXT ProgrammingDocument53 pagesNXT ProgrammingRaj KumarNo ratings yet
- BTP Mid ReportDocument21 pagesBTP Mid ReportforgamesliveNo ratings yet
- For MamtDocument72 pagesFor Mamt. Phone Myat ZawNo ratings yet
- Pacotes 12GDocument13 pagesPacotes 12GTatiano BrolloNo ratings yet
- WheelieKing Trainer Project ReportDocument45 pagesWheelieKing Trainer Project ReportMarc WilsonNo ratings yet
- A New Approach To Linear Motion Technology: The Wall Is The LimitDocument6 pagesA New Approach To Linear Motion Technology: The Wall Is The LimitYok Böle BişiNo ratings yet
- Project Report PDFDocument10 pagesProject Report PDFAnik GoyalNo ratings yet
- 4 Legged Multi Terrain RobotDocument15 pages4 Legged Multi Terrain RobotAyushNo ratings yet
- Design and Analysis of Two Wheeler Shock Absorber Coil SpringDocument8 pagesDesign and Analysis of Two Wheeler Shock Absorber Coil SpringVivek VikuNo ratings yet
- Roboclimber: MCL211 Design of Machines Final SubmissionDocument33 pagesRoboclimber: MCL211 Design of Machines Final SubmissionNavneet GoyalNo ratings yet
- Crank SliderDocument6 pagesCrank SliderUzma ObaidNo ratings yet
- ANSYS Modal AnalysisDocument40 pagesANSYS Modal Analysismbreuking6943No ratings yet
- Prolift SCL/Prolift HD: Owner'S ManualDocument16 pagesProlift SCL/Prolift HD: Owner'S ManualMohammed Qaid AlathwaryNo ratings yet
- Cad AssignmentDocument6 pagesCad AssignmentorigafelixNo ratings yet
- Designof Mechatronics Final ReportDocument25 pagesDesignof Mechatronics Final ReportMoheb IshakNo ratings yet
- Heritage Institute of Technology: Department of Mechanical EngineeringDocument8 pagesHeritage Institute of Technology: Department of Mechanical EngineeringSwapnil DeyNo ratings yet
- SPIDER Robot Arm:: Main FeaturesDocument6 pagesSPIDER Robot Arm:: Main FeaturesShamanth SHNo ratings yet
- Solarise Pick and Place Robot: SynopsisDocument10 pagesSolarise Pick and Place Robot: SynopsisSameer SalamNo ratings yet
- Development of A Lightweight On-Board Hydraulic System For A Quadruped RobotDocument11 pagesDevelopment of A Lightweight On-Board Hydraulic System For A Quadruped RobotTHE ULTIMATENo ratings yet
- Bunty 2Document101 pagesBunty 2sydavali.shaikNo ratings yet
- Component Modeling - HDocument5 pagesComponent Modeling - HVasu IyerNo ratings yet
- 2013 11 DUPLEX EasyDocument21 pages2013 11 DUPLEX EasyAnonymous HC0tWeNo ratings yet
- JDE ApplicationDocument642 pagesJDE ApplicationAnonymous cputyzNo ratings yet
- Cosben e Brochure PDFDocument28 pagesCosben e Brochure PDFsmw maintanceNo ratings yet
- GIS Project Management GIS Project Management: Quality Issues Quality IssuesDocument1 pageGIS Project Management GIS Project Management: Quality Issues Quality IssuesLeo DobreciNo ratings yet
- RT L2 General Examination PaperDocument4 pagesRT L2 General Examination PaperdaddadNo ratings yet
- Prospects For Alkaline Zero Gap Water Electrolysers For Hydrogen ProductionDocument16 pagesProspects For Alkaline Zero Gap Water Electrolysers For Hydrogen Productionkhan47pkNo ratings yet
- Mimaki Install Guide (En)Document16 pagesMimaki Install Guide (En)หน่อง นพดลNo ratings yet
- Hot Wire Anemometry HandoutDocument4 pagesHot Wire Anemometry HandoutZ-BNo ratings yet
- Air-Bag: (1) Connector InformationDocument34 pagesAir-Bag: (1) Connector InformationbakriramziNo ratings yet
- Jerry Hill's Letter To Bijan Sartipi, Director, District 4 CaltransDocument1 pageJerry Hill's Letter To Bijan Sartipi, Director, District 4 CaltransSabrina BrennanNo ratings yet
- BIOS 203: Free Energy Methods Tom MarklandDocument23 pagesBIOS 203: Free Energy Methods Tom MarklandNemanja ĐokovićNo ratings yet
- CovestroDocument2 pagesCovestroRonaldo CamargoNo ratings yet
- How Is Electrical Energy MeasuredDocument4 pagesHow Is Electrical Energy MeasuredSonya ReddyNo ratings yet
- Sewerage & Sewage Treatment PlantDocument26 pagesSewerage & Sewage Treatment PlantSyed ZamanNo ratings yet
- Astm D3359Document9 pagesAstm D3359Angel GuachaminNo ratings yet
- David Lowe Thesis PDFDocument201 pagesDavid Lowe Thesis PDFKRISHNA VAMSHINo ratings yet
- VLE Lactic Acid Ethyl Lactate Esterification PDFDocument7 pagesVLE Lactic Acid Ethyl Lactate Esterification PDFAseem Kashyap0% (1)
- zx350lc 3 InglesDocument6 pageszx350lc 3 InglesLuis Nahuelhuaique LemusNo ratings yet
- SR No Co Name Salutation Person Designation Contact NoDocument4 pagesSR No Co Name Salutation Person Designation Contact NoAnindya SharmaNo ratings yet
- Efficia Infant WarmingDocument8 pagesEfficia Infant WarmingNurhidayat MursalinNo ratings yet
- Eje Delantero BMW F10Document94 pagesEje Delantero BMW F10Daniel Muñoz SotomayorNo ratings yet
- Distributed PowerDocument3 pagesDistributed PowertibvalNo ratings yet
- JNTUA B Tech 2018 1 2 May R15 ECE 15A54201 Mathematics IIDocument2 pagesJNTUA B Tech 2018 1 2 May R15 ECE 15A54201 Mathematics IIMRUDULA KULAKARNINo ratings yet
- Quality ControlDocument10 pagesQuality ControlSabbir AhmedNo ratings yet
- GWSSB Vendor List 19.11.2013Document18 pagesGWSSB Vendor List 19.11.2013sivesh_rathiNo ratings yet