You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- CRB SepOct 2022Document52 pagesCRB SepOct 2022mchilwesaNo ratings yet
- CRB NovDec 2023Document68 pagesCRB NovDec 2023mchilwesaNo ratings yet
- Repair of A Scour-Damaged Pier On The Historic Rogue River (Gold Beach) BridgeDocument12 pagesRepair of A Scour-Damaged Pier On The Historic Rogue River (Gold Beach) BridgemchilwesaNo ratings yet
- CRB SepOct 2023Document48 pagesCRB SepOct 2023mchilwesaNo ratings yet
- Guide To Concrete Overlays 4th Ed WebDocument156 pagesGuide To Concrete Overlays 4th Ed WebmchilwesaNo ratings yet
- CI Vol40No5 FullDocument60 pagesCI Vol40No5 FullmchilwesaNo ratings yet
- CI Vol40No6 FullDocument64 pagesCI Vol40No6 FullmchilwesaNo ratings yet
- CI Vol40No2 FullDocument64 pagesCI Vol40No2 FullmchilwesaNo ratings yet
- CI Vol40No3 FullDocument64 pagesCI Vol40No3 FullmchilwesaNo ratings yet
- CI Vol40No4 FullDocument88 pagesCI Vol40No4 FullmchilwesaNo ratings yet
- Mechanics of Laminated Composite Plates and Shells-JN ReddyDocument855 pagesMechanics of Laminated Composite Plates and Shells-JN Reddypedro_astro100% (1)
- Ci Vol40no1Document68 pagesCi Vol40no1mchilwesaNo ratings yet
- Concrete InternationalDocument104 pagesConcrete Internationalmchilwesa100% (1)
- Stability of StructuresDocument83 pagesStability of StructuresmchilwesaNo ratings yet
- ViscoelasticityDocument11 pagesViscoelasticitymchilwesaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Prelim Examination Set A Solutions PDFDocument6 pagesPrelim Examination Set A Solutions PDFOxy GenNo ratings yet
- TRANSMICIONDocument84 pagesTRANSMICIONPepe Al100% (1)
- COF069115 05 Systemlosungen Broschure en RZ WebDocument11 pagesCOF069115 05 Systemlosungen Broschure en RZ WebAnonymous TThmYKFpNo ratings yet
- Floating JointDocument2 pagesFloating JointEDUARDO NICOLASNo ratings yet
- 2506A E15TAG3 (TPD1581e2)Document14 pages2506A E15TAG3 (TPD1581e2)Rurouni Martínez100% (1)
- Spotcheck Developer SKD-S2: CertificationDocument3 pagesSpotcheck Developer SKD-S2: Certificationnasser saldaña quinteroNo ratings yet
- Hydraulic Design of IntakeDocument4 pagesHydraulic Design of IntakeGokul100% (1)
- 00 Catalogue Update UK PDFDocument7 pages00 Catalogue Update UK PDFhepcomotionNo ratings yet
- Garrett SwimmingDocument30 pagesGarrett SwimmingRam RamNo ratings yet
- SCALARS and VECTORS NotesDocument3 pagesSCALARS and VECTORS NotesJoana MendoNo ratings yet
- HDPE Liner WT For CS PipesDocument2 pagesHDPE Liner WT For CS Pipesmasdarto7032100% (1)
- Manual de Servicio CX330 PDFDocument623 pagesManual de Servicio CX330 PDFandrea83% (6)
- SKF Explorer ACBB 10572 en TCM 12-32273Document8 pagesSKF Explorer ACBB 10572 en TCM 12-32273ankitsarvaiyaNo ratings yet
- CE 324 Test 2 Solution SheetDocument2 pagesCE 324 Test 2 Solution SheetBradleyNo ratings yet
- Hardness TestDocument10 pagesHardness Testanil chejara100% (1)
- Section Properties and CapacitiesDocument19 pagesSection Properties and CapacitiesRufus ChengNo ratings yet
- Report On Hvac Design of A BuildingDocument66 pagesReport On Hvac Design of A BuildingHemani SinghNo ratings yet
- ASME FlangeDocument1 pageASME FlangeHanda Bin AdiNo ratings yet
- Final Internship SeminarDocument17 pagesFinal Internship SeminarPrajwal Uttur100% (2)
- 103 TOP Heat Transfer - Mechanical Engineering Multiple Choice Questions and Answers List - MCQs Preparation For Engineering Competitive ExamsDocument19 pages103 TOP Heat Transfer - Mechanical Engineering Multiple Choice Questions and Answers List - MCQs Preparation For Engineering Competitive ExamsNagaraj Muniyandi100% (2)
- Bfe API 6a ValvesDocument32 pagesBfe API 6a ValvesAldo P WicaksanaNo ratings yet
- FLSmidth Centrifuging Solutions - SmidthDocument8 pagesFLSmidth Centrifuging Solutions - SmidthLuis Orlando Villarroel TorrezNo ratings yet
- LNG (Shell Inc) DMR & PMR ProcessDocument10 pagesLNG (Shell Inc) DMR & PMR ProcessD K S100% (1)
- Air Drilling With MotorsDocument6 pagesAir Drilling With MotorsGharib HashemNo ratings yet
- DAILY Maintenance Checklist: Qt/Elect/MiscDocument2 pagesDAILY Maintenance Checklist: Qt/Elect/MiscAli KammouniNo ratings yet
- Mech Lathe Machine ReportDocument15 pagesMech Lathe Machine ReportHassan TalhaNo ratings yet
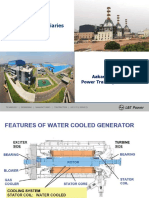
- Generator AuxiliariesDocument39 pagesGenerator Auxiliariesharry2586No ratings yet
- Additional Objective Type QuestionDocument32 pagesAdditional Objective Type QuestionThinnai TheniNo ratings yet
- Kaeser Process MapDocument17 pagesKaeser Process MapJose LunaNo ratings yet
- Thermodynamics Temperature08Document19 pagesThermodynamics Temperature08Abdelkader Faklani DouNo ratings yet