You might also like
- Strength of Materials by S K Mondal 4 PDFDocument34 pagesStrength of Materials by S K Mondal 4 PDFajaykrishna_99No ratings yet
- Plate No. 1 ST314 - Structural Theory: Don Honorio Ventura State UniversityDocument4 pagesPlate No. 1 ST314 - Structural Theory: Don Honorio Ventura State UniversityRamil T. TrinidadNo ratings yet
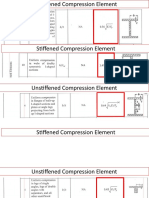
- Stiffened and UnstiffenedDocument8 pagesStiffened and UnstiffenedCharizza Montarin CENo ratings yet
- Design of Steel Beams To AISC - LRFDDocument52 pagesDesign of Steel Beams To AISC - LRFDsony setyawan100% (1)
- Timber As Structural MaterialDocument38 pagesTimber As Structural MaterialCharizza Montarin CENo ratings yet
- Slope Deflection MethodDocument8 pagesSlope Deflection Methodpankaj_97No ratings yet
- Lesson 5. Statically Indeterminate Plane Frames - Part 1 Portal MethodDocument92 pagesLesson 5. Statically Indeterminate Plane Frames - Part 1 Portal MethodCharizza Montarin CENo ratings yet
- IntroductionDocument39 pagesIntroductionabdul karee100% (2)
- Week 5 TrussesDocument40 pagesWeek 5 Trussesiwhy_No ratings yet
- Introduction to Structural AnalysisDocument29 pagesIntroduction to Structural AnalysisRu TandsNo ratings yet
- CE 382 L6 - Shear and Moment DiagramsDocument42 pagesCE 382 L6 - Shear and Moment DiagramsAydın Göğüş100% (2)
- Chapter IIIDocument83 pagesChapter IIIlatendra kumar srivastavNo ratings yet
- Lesson 3. Deflection - Part 2 Area Moment MethodDocument20 pagesLesson 3. Deflection - Part 2 Area Moment MethodCharizza Montarin CENo ratings yet
- RC-SEODocument200 pagesRC-SEOMeverlyn RoqueroNo ratings yet
- ECS448 - Topic 5 (Deformation - Virtual Work For Frame & Truss)Document33 pagesECS448 - Topic 5 (Deformation - Virtual Work For Frame & Truss)darwishshahrir__No ratings yet
- L 06 08Document67 pagesL 06 08Anonymous mXicTi8hBNo ratings yet
- Statics NoteDocument26 pagesStatics NoteMei GuanNo ratings yet
- Lesson 5. Statically Indeterminate Plane Frames - Part 2 Cantilever MethodDocument129 pagesLesson 5. Statically Indeterminate Plane Frames - Part 2 Cantilever MethodCharizza Montarin CENo ratings yet
- Distribution of Lateral ForcesDocument2 pagesDistribution of Lateral ForcesGerald OrtizNo ratings yet
- Rectangular Reinforced Concrete BeamDocument60 pagesRectangular Reinforced Concrete BeamMedianna Novita100% (1)
- Forces in SpaceDocument58 pagesForces in Spacesalman husainNo ratings yet
- Chapter 7 PDFDocument20 pagesChapter 7 PDFTravis ShivleyNo ratings yet
- Problem Set No.1-MidtermDocument31 pagesProblem Set No.1-MidtermROYCE1983No ratings yet
- 04 ColumnDocument18 pages04 ColumnSamantha Isabel S AguimbagNo ratings yet
- Boietz' Slope & Deflection Diagram by PartsDocument10 pagesBoietz' Slope & Deflection Diagram by PartsPapaDaplisNo ratings yet
- Torsion 6th ChapterDocument13 pagesTorsion 6th ChapterakshatbhargavaNo ratings yet
- Footing Soil Pressure From Biaxial LoadingDocument18 pagesFooting Soil Pressure From Biaxial LoadingSon NguyenNo ratings yet
- MECHANICS OF MATERIALS REVIEWDocument23 pagesMECHANICS OF MATERIALS REVIEWlowCL100% (1)
- Methods of Joints & SectionsDocument18 pagesMethods of Joints & SectionsDianne VillanuevaNo ratings yet
- Analysis of Indeterminate Structures by Force MethodDocument17 pagesAnalysis of Indeterminate Structures by Force Methodatish k100% (2)
- Castigliano 2nd TheoremDocument64 pagesCastigliano 2nd TheoremMađar Robert ErdešiNo ratings yet
- Moment Distribution Method: Presented by Fuad Bin NazrulDocument20 pagesMoment Distribution Method: Presented by Fuad Bin NazrulMOZAHER UL KABIR MAHADINo ratings yet
- Screw Connections Subject To Tension Pull-Out and Shear ForcesDocument63 pagesScrew Connections Subject To Tension Pull-Out and Shear ForcesSalik TrambooNo ratings yet
- Lesson 5. Statically Indeterminate Plane Frames - Part 3 Factor MethodDocument85 pagesLesson 5. Statically Indeterminate Plane Frames - Part 3 Factor MethodCharizza Montarin CENo ratings yet
- Lateral Loads and Building Bracing SystemsDocument23 pagesLateral Loads and Building Bracing SystemsAbdelrahman Hassan El-MallaNo ratings yet
- Statically Indeterminate Structures Analysis MethodsDocument33 pagesStatically Indeterminate Structures Analysis Methodsjackie_9227No ratings yet
- Lesson 2. Statically Determinate Structures - Part 1 Beam ReactionsDocument23 pagesLesson 2. Statically Determinate Structures - Part 1 Beam ReactionsCharizza Montarin CENo ratings yet
- Chapter 4.a (Simple Truses)Document24 pagesChapter 4.a (Simple Truses)LogarithemNo ratings yet
- Statics Mechanics GuideDocument210 pagesStatics Mechanics Guideabdul khader100% (1)
- Shear Wall - BS8110-97-007Document4 pagesShear Wall - BS8110-97-007Kavin TamNo ratings yet
- Chapter 1 - IntroductionDocument26 pagesChapter 1 - IntroductionEvo LanzNo ratings yet
- Bending Moment and Shear Force Diagrams ExplainedDocument11 pagesBending Moment and Shear Force Diagrams Explainedhardik5818100% (1)
- Kathmandu University Structural Analysis CourseDocument1 pageKathmandu University Structural Analysis CourseRamesh AdhikariNo ratings yet
- ST2 p9 Moment Distribution MethodDocument50 pagesST2 p9 Moment Distribution MethodhanzNo ratings yet
- Reinforced Concrete Drafting: Helping Turn Ideas Into RealityDocument33 pagesReinforced Concrete Drafting: Helping Turn Ideas Into Realityrudyzarzoff100% (1)
- Building IrregularitiesDocument16 pagesBuilding Irregularitieskalpanaadhi100% (1)
- Indeterminate Structures - Force MethodDocument5 pagesIndeterminate Structures - Force Methodpicefeati100% (2)
- A New Approach For Design of Steel Beam-Columns Our A.Document32 pagesA New Approach For Design of Steel Beam-Columns Our A.mbrown4382No ratings yet
- Engineering Mechanics Problems on Friction and ForcesDocument8 pagesEngineering Mechanics Problems on Friction and ForcesVenkatNo ratings yet
- Seismic Design Lec 2 PDFDocument32 pagesSeismic Design Lec 2 PDFGuillermo Cordero100% (1)
- CE131P - Deflection by Conjugate Beam W AudioDocument20 pagesCE131P - Deflection by Conjugate Beam W AudioArley solizaNo ratings yet
- 9 Beam DeflectionDocument34 pages9 Beam DeflectionBharat JajoriaNo ratings yet
- Analyzing Indeterminate Beams Using Three Moment TheoremDocument16 pagesAnalyzing Indeterminate Beams Using Three Moment Theoremkalpanaadhi100% (1)
- Beams NotesDocument4 pagesBeams Notesandrew silungweNo ratings yet
- SF BMDocument32 pagesSF BMBhupesh GoyalNo ratings yet
- Bending Moment in Beams ExperimentDocument6 pagesBending Moment in Beams ExperimentMansoob BukhariNo ratings yet
- Shear and Moment in BeamsDocument8 pagesShear and Moment in BeamsKimberly Jane MitraNo ratings yet
- Shear Force and Bending MomentDocument23 pagesShear Force and Bending Momentyibungo100% (2)
- Bending Moment in Beams ExperimentDocument6 pagesBending Moment in Beams ExperimentMansoob BukhariNo ratings yet
- Hydrodynamic Bearing TheoryDocument20 pagesHydrodynamic Bearing TheoryPRASAD32675% (4)
- Fracture Mechanics and Steady Load Failure Theory SummaryDocument17 pagesFracture Mechanics and Steady Load Failure Theory Summaryapi-3710585100% (3)
- Stress Concentration Factors and Notch SensitivityDocument24 pagesStress Concentration Factors and Notch Sensitivityapi-3710585100% (2)
- Steady Load Failure TheoriesDocument17 pagesSteady Load Failure Theoriesapi-3710585No ratings yet
- FatigueDocument29 pagesFatigueapi-3710585100% (1)
- Steady Load Failure Theories (Distortion Energy Theory)Document20 pagesSteady Load Failure Theories (Distortion Energy Theory)api-3710585100% (1)
- Fatigue IIDocument28 pagesFatigue IIapi-3710585100% (3)
- 1D 20finite 20element 20IIDocument15 pages1D 20finite 20element 20IIapi-3710585100% (1)
- Stress at A PointDocument19 pagesStress at A Pointapi-3710585100% (2)
- Mechanical Properties OfDuctile Metallic MaterialsDocument15 pagesMechanical Properties OfDuctile Metallic Materialsapi-3710585No ratings yet
- 1D 20finite 20elementDocument15 pages1D 20finite 20elementapi-3710585No ratings yet
- Influence of Fabrication Processes On The Strength OfMetalsDocument28 pagesInfluence of Fabrication Processes On The Strength OfMetalsapi-3710585No ratings yet
- Fundamental of Compressible Fluid MechanicsDocument333 pagesFundamental of Compressible Fluid Mechanicsapi-3710585100% (2)
- CH 4Document62 pagesCH 4api-3710585No ratings yet
- Statics of Bending Shear and Bending Moment DiagramsDocument12 pagesStatics of Bending Shear and Bending Moment Diagramsapi-3710585100% (1)
- نظام الهيدروليك في الطائرهDocument32 pagesنظام الهيدروليك في الطائرهapi-3710585No ratings yet
- Shear Deflections of BeamsDocument12 pagesShear Deflections of Beamsapi-3710585100% (2)
- Some Guidelines For Constructing Shear Force and Bending Moment DiagramssDocument3 pagesSome Guidelines For Constructing Shear Force and Bending Moment Diagramssapi-3710585100% (1)
- DiagramsDocument2 pagesDiagramsapi-3710585No ratings yet
- Significant Figures, Scientific Notation and Metric PrefixesDocument3 pagesSignificant Figures, Scientific Notation and Metric PrefixesmphoNo ratings yet
- 2 Truss - Analysis IvleDocument29 pages2 Truss - Analysis IvleSteven KuaNo ratings yet
- Drug Diffusion Rates in Membrane vs Monolithic SystemsDocument7 pagesDrug Diffusion Rates in Membrane vs Monolithic Systemszubin33333No ratings yet
- Prestressed Concrete StructuresDocument40 pagesPrestressed Concrete StructuresakanagesNo ratings yet
- Experiment #5 Pulse Response of Simple RC & RL CircuitsDocument11 pagesExperiment #5 Pulse Response of Simple RC & RL CircuitsAhmed HamoudaNo ratings yet
- Diffuse Interface Models in Fluid Mechanics: Didier Jamet CEA-GrenobleDocument35 pagesDiffuse Interface Models in Fluid Mechanics: Didier Jamet CEA-GrenobleSubramanya SadasivaNo ratings yet
- Analysis of Scavenging Process in A New Two Stroke Cross-Scavenged EngineDocument6 pagesAnalysis of Scavenging Process in A New Two Stroke Cross-Scavenged EngineNet WalkerNo ratings yet
- Experiment No: Objective: ApparatusDocument3 pagesExperiment No: Objective: ApparatusAfzaal FiazNo ratings yet
- BOUNDS-Analysis of Properties of Fiber Composites With Anisotropic Constituents PDFDocument8 pagesBOUNDS-Analysis of Properties of Fiber Composites With Anisotropic Constituents PDFRaghavendra PrasadNo ratings yet
- Acoustic Emission TestingDocument24 pagesAcoustic Emission TestingWoodrow FoxNo ratings yet
- Country's Best Online Test PlatformDocument68 pagesCountry's Best Online Test PlatformAkarshNo ratings yet
- Design Pipe Systems Pumps Gea Hilge Manual 272424Document60 pagesDesign Pipe Systems Pumps Gea Hilge Manual 272424Geferson GonçalvesNo ratings yet
- Thermo 2Document14 pagesThermo 2Yato QtNo ratings yet
- ISO 3952-1 Kinematic Diagrams - Graphical Symbols, Part 1Document13 pagesISO 3952-1 Kinematic Diagrams - Graphical Symbols, Part 1Phạm Hữu PhướcNo ratings yet
- FC Sem 3 NATURE AND DEVELOPMENT OF SCIENCEDocument11 pagesFC Sem 3 NATURE AND DEVELOPMENT OF SCIENCEPravin RnsNo ratings yet
- Intensity of Optical Absorption by Excitons (Elliott 1957) PDFDocument6 pagesIntensity of Optical Absorption by Excitons (Elliott 1957) PDFDavid ParfittNo ratings yet
- Detailed Lesson Plan in Science 8: ProceduresDocument8 pagesDetailed Lesson Plan in Science 8: ProceduresMc Laurence Marquez SaligumbaNo ratings yet
- Radiation Protection and Dosimetry Assessment 2Document2 pagesRadiation Protection and Dosimetry Assessment 2George ChahniNo ratings yet
- Numerical Modeling of Physical Process of Far Field Underwater ExplosionsDocument11 pagesNumerical Modeling of Physical Process of Far Field Underwater ExplosionsKristjan TabriNo ratings yet
- LCA Lab1Document13 pagesLCA Lab1Rizwan HanifNo ratings yet
- Analytical DynamicsDocument731 pagesAnalytical DynamicsCeleste Romero LongarNo ratings yet
- Operation and Modeling of TCSC for Power System StabilityDocument39 pagesOperation and Modeling of TCSC for Power System Stabilitysabarish0801No ratings yet
- Charles' Law AttachmentsDocument4 pagesCharles' Law AttachmentsSherwin UbandoNo ratings yet
- NET December 2016 Physics Exam QuestionsDocument21 pagesNET December 2016 Physics Exam QuestionsRamesh IswaraNo ratings yet
- 1Q - Week 1 Physical ScienceDocument23 pages1Q - Week 1 Physical ScienceJEBONIE TUBICENo ratings yet
- Physical property tablesDocument27 pagesPhysical property tablesIan Oscar Gomez HuamaniNo ratings yet
- Superconducting Fault Current LimiterDocument15 pagesSuperconducting Fault Current Limiterumesh kadNo ratings yet
- Column Base PlateDocument6 pagesColumn Base PlatebuildconNo ratings yet
- Andrew Powell - Consciousness That Transcends Spacetime - Its Significance For The Therapeutic ProcessDocument15 pagesAndrew Powell - Consciousness That Transcends Spacetime - Its Significance For The Therapeutic ProcessmaiaNo ratings yet