You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
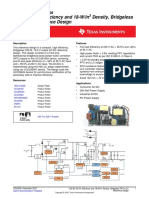
- Tiduef8 PDFDocument23 pagesTiduef8 PDFchethanNo ratings yet
- DSP CepDocument15 pagesDSP CepKashif HassanNo ratings yet
- Control System Theory and Design: ECE 515 Class NotesDocument238 pagesControl System Theory and Design: ECE 515 Class NotesS AbishekNo ratings yet
- 4.power Systems & Synchronous Motor Operation in IndiaDocument12 pages4.power Systems & Synchronous Motor Operation in IndiachethanNo ratings yet
- 5.stability Issues of Synchronous MotorDocument6 pages5.stability Issues of Synchronous MotorchethanNo ratings yet
- 3.operation When Feeding A Local Load, Synchronization & Grid FailureDocument19 pages3.operation When Feeding A Local Load, Synchronization & Grid FailurechethanNo ratings yet
- 1.synchronous MachinesDocument13 pages1.synchronous MachineschethanNo ratings yet
- 2.effect of Variation of Load P.F. On Synchronous MachineDocument13 pages2.effect of Variation of Load P.F. On Synchronous MachinechethanNo ratings yet
- Basic Data Mining Techniques: AttributesDocument12 pagesBasic Data Mining Techniques: AttributeschethanNo ratings yet
- Radio Frequency DC-DC Power Conversion PDFDocument204 pagesRadio Frequency DC-DC Power Conversion PDFchethanNo ratings yet
- Solar PV SystemsDocument21 pagesSolar PV SystemschethanNo ratings yet
- Nanosolar PowersheetDocument18 pagesNanosolar PowersheetchethanNo ratings yet
- Model Predictive ControlDocument49 pagesModel Predictive ControlchethanNo ratings yet
- Solar Water PumpingDocument16 pagesSolar Water Pumpingchethan50% (2)
- Anupam Vinay Surin 12PS05F P & Es, NitkDocument20 pagesAnupam Vinay Surin 12PS05F P & Es, NitkchethanNo ratings yet
- AssignmentDocument12 pagesAssignmentSamuel TanNo ratings yet
- IES - Electronics Engineering - Control SystemDocument66 pagesIES - Electronics Engineering - Control SystemWaliullah Panhwar100% (1)
- Syllabus of B.tech Hons Electrical TechnologyDocument48 pagesSyllabus of B.tech Hons Electrical Technologyumarsaleem069No ratings yet
- System Identification Theory For The User 2nd EditDocument3 pagesSystem Identification Theory For The User 2nd Edit鍾巧貞No ratings yet
- Industry Controller KFM 92 / KFM 93 B 9200 E Operating InstructionsDocument8 pagesIndustry Controller KFM 92 / KFM 93 B 9200 E Operating InstructionsПавелNo ratings yet
- Soben BA25Document2 pagesSoben BA25choisoominNo ratings yet
- Self-Balancing MotorcycleDocument186 pagesSelf-Balancing MotorcycleFofanaNo ratings yet
- Pid Controller Design and TuningDocument33 pagesPid Controller Design and TuningfaqihNo ratings yet
- Case Study of PID Control in An FPGA PDFDocument18 pagesCase Study of PID Control in An FPGA PDFwigaYeHtetNo ratings yet
- Fundamentos de Control William LevineDocument10 pagesFundamentos de Control William LevineJhon CerónNo ratings yet
- 5 Block Diagram Representation of LTI Systems: U (T) G(S) y (T)Document3 pages5 Block Diagram Representation of LTI Systems: U (T) G(S) y (T)Yassine DjillaliNo ratings yet
- 723PLUS Load Sharing Control Cat Adem: Product Manual 26373 (Revision B)Document44 pages723PLUS Load Sharing Control Cat Adem: Product Manual 26373 (Revision B)Ashraf AbdelrahmanNo ratings yet
- Assignment-1 Sub: Basic Electronics SUB CODE: 2110016Document15 pagesAssignment-1 Sub: Basic Electronics SUB CODE: 2110016khyatichavdaNo ratings yet
- 03-R Osterhuber DGLR HQ Workshop 081112Document21 pages03-R Osterhuber DGLR HQ Workshop 081112Martin Schweighart MoyaNo ratings yet
- Lecture 31 Ee205Document14 pagesLecture 31 Ee205Muhammad hashimNo ratings yet
- Experiment 11: MATLAB With Arduino: Part1: Introduction To ARDUINO/SIMULINKDocument12 pagesExperiment 11: MATLAB With Arduino: Part1: Introduction To ARDUINO/SIMULINKMohamed Zied ChaariNo ratings yet
- G36a EvDocument100 pagesG36a EvSohibul HajahNo ratings yet
- Missile GuidanceDocument59 pagesMissile GuidanceSardendu PramanikNo ratings yet
- A New Reaching Law For Anti-Disturbance Sliding-Mode Control of PMSM Speed Regula-Tion SystemDocument10 pagesA New Reaching Law For Anti-Disturbance Sliding-Mode Control of PMSM Speed Regula-Tion SystemAmar SajiNo ratings yet
- Techniques For Digital Redesign of Analog Controllers: Abhishek Singh, Shekhar Yadav, J.P.Tiwari, S.K.NagarDocument4 pagesTechniques For Digital Redesign of Analog Controllers: Abhishek Singh, Shekhar Yadav, J.P.Tiwari, S.K.NagarRakeshconclaveNo ratings yet
- Control Systems May 2017Document7 pagesControl Systems May 2017Department of Electronics and Communication Engineering AKNUNo ratings yet
- Downloads New Library Books DataDocument38 pagesDownloads New Library Books DataSomava Prasanna Mukherjee0% (1)
- Control System Design by Frequency Response Using Matlab: Riyadh Nazar Ali AL-Gburi, Ali Saleh AzizDocument7 pagesControl System Design by Frequency Response Using Matlab: Riyadh Nazar Ali AL-Gburi, Ali Saleh AzizAmanNo ratings yet
- Open Loop and Close Loop Control SystemDocument10 pagesOpen Loop and Close Loop Control SystemAmrit SinghaNo ratings yet
- Engine Control Unit Modeling With Engine Feature C Code For HEV ApplicationsDocument12 pagesEngine Control Unit Modeling With Engine Feature C Code For HEV ApplicationsTeddy KhantNo ratings yet
- Renewable EnergyDocument9 pagesRenewable EnergyjavierNo ratings yet
- ATI Catalog US PDFDocument72 pagesATI Catalog US PDFgfdsal878No ratings yet
- Design of Non Linear Dynamic Inversion Controller For Trajectory FollowingDocument8 pagesDesign of Non Linear Dynamic Inversion Controller For Trajectory FollowingHimanshuPrabhatNo ratings yet