You might also like
- Chapter 7 Design For ShearDocument40 pagesChapter 7 Design For SheariiMa sticNo ratings yet
- Chapter 11 CACCDHDocument60 pagesChapter 11 CACCDHmeda012No ratings yet
- GATE Structure Qwestion PDFDocument117 pagesGATE Structure Qwestion PDFmd alkarim100% (2)
- Basics of Ship VibrationDocument17 pagesBasics of Ship Vibrationbhuktha100% (2)
- First Quarterly Exam in Physics 1Document6 pagesFirst Quarterly Exam in Physics 1Jojimar JulianNo ratings yet
- Indeterminate StructureDocument82 pagesIndeterminate Structuresenthil.m3457100% (1)
- L 06 08Document67 pagesL 06 08Anonymous mXicTi8hBNo ratings yet
- Deflection of Beam FundaDocument11 pagesDeflection of Beam Fundahardik5818100% (1)
- Geo FormulasDocument6 pagesGeo FormulasSabre D. ButitoNo ratings yet
- Shear CentreDocument2 pagesShear CentrePaulSmile100% (1)
- Chapter IIIDocument83 pagesChapter IIIlatendra kumar srivastavNo ratings yet
- SF BM TheoryDocument4 pagesSF BM TheoryRAMAKANT RANANo ratings yet
- Truss AnalysisDocument11 pagesTruss AnalysisAdrian ParasNo ratings yet
- Rif DC Tdi Ii Rif DC Tdi Ii Reinforced Concrete Design Ii Reinforced Concrete Design IiDocument24 pagesRif DC Tdi Ii Rif DC Tdi Ii Reinforced Concrete Design Ii Reinforced Concrete Design IiXiomara A OrdoñezNo ratings yet
- Building IrregularitiesDocument16 pagesBuilding Irregularitieskalpanaadhi100% (1)
- 4) Double Reinforced BeamDocument3 pages4) Double Reinforced BeamVanessa Rosal PalerNo ratings yet
- Influence Lines For Beams and FramesDocument7 pagesInfluence Lines For Beams and FramesAfia S HameedNo ratings yet
- Analysis of Indeterminate Structures by Force MethodDocument17 pagesAnalysis of Indeterminate Structures by Force Methodatish k100% (2)
- Cibis Tower 9 - Civil Work: RC Retaining Wall Along Inner RoadDocument1 pageCibis Tower 9 - Civil Work: RC Retaining Wall Along Inner RoadUcok DedyNo ratings yet
- Intro Load PathDocument41 pagesIntro Load PathanhnguyenhaiNo ratings yet
- Short Column: P F ' F A, and The Total Cross Section Area of The Steel RebarDocument2 pagesShort Column: P F ' F A, and The Total Cross Section Area of The Steel Rebaraditya2053No ratings yet
- RC ColumnsDocument42 pagesRC Columnsyenrai100% (1)
- CE 308 - Lec 9 - Flexural Analysis and Design of BeamsDocument62 pagesCE 308 - Lec 9 - Flexural Analysis and Design of BeamsAli BajwaNo ratings yet
- Design of Beam Aci 11-01-05Document23 pagesDesign of Beam Aci 11-01-05MuhammadMuzammilNo ratings yet
- Slope Deflection and Moment Distribution MethodDocument33 pagesSlope Deflection and Moment Distribution MethodBari FayzulNo ratings yet
- Concrete Slab Design DraftDocument13 pagesConcrete Slab Design DraftTom FallonNo ratings yet
- Analysis and Design For TorsionDocument44 pagesAnalysis and Design For TorsionMuhammad Saeed ZafarNo ratings yet
- Strength of Materials by S K Mondal 4 PDFDocument34 pagesStrength of Materials by S K Mondal 4 PDFajaykrishna_99No ratings yet
- Finite Element Formulation For BeamsDocument27 pagesFinite Element Formulation For BeamsPalash JainNo ratings yet
- 1 - Matrix Method of Structural AnalysisDocument5 pages1 - Matrix Method of Structural AnalysistrixiaNo ratings yet
- Infuence Line in Trusses PDFDocument14 pagesInfuence Line in Trusses PDFTapu mojumderNo ratings yet
- Bending of Beams SolleroDocument34 pagesBending of Beams SolleroPedroLemosNo ratings yet
- 2way Slab & FootingDocument52 pages2way Slab & FootingMuhammad Saqib Abrar0% (1)
- Structure Design of Parking Building Sun PDFDocument16 pagesStructure Design of Parking Building Sun PDFHoHo WindyantoNo ratings yet
- Unsymmetrical Bending Shear Stress DistributionDocument29 pagesUnsymmetrical Bending Shear Stress DistributionMuhammad RedzuanNo ratings yet
- RCE Shear DesignDocument25 pagesRCE Shear DesignWindi AstutiNo ratings yet
- Column Interaction DiagramDocument4 pagesColumn Interaction DiagramVicenteRocabadoNo ratings yet
- Footing Soil Pressure From Biaxial LoadingDocument18 pagesFooting Soil Pressure From Biaxial LoadingSon NguyenNo ratings yet
- Slope-Deflection EquationsDocument33 pagesSlope-Deflection Equationstosha_flNo ratings yet
- British Problem 5 PDFDocument5 pagesBritish Problem 5 PDFelixnzNo ratings yet
- 4 - Matrix Displacement Method For Rigid FramesDocument18 pages4 - Matrix Displacement Method For Rigid FramestrixiaNo ratings yet
- Dr. Ali TayehDocument32 pagesDr. Ali TayehvijaykumarzNo ratings yet
- Numerical Methods and Computer ProgrammingDocument19 pagesNumerical Methods and Computer ProgrammingSabby OnindoNo ratings yet
- RCI Hand Out Chapter 3Document12 pagesRCI Hand Out Chapter 3Nathnael JiaNo ratings yet
- Structural AnalysisDocument42 pagesStructural Analysisjakeer7No ratings yet
- CE 382 L6 - Shear and Moment Diagrams PDFDocument42 pagesCE 382 L6 - Shear and Moment Diagrams PDFparamarthasom1974No ratings yet
- S A D - I: Tructural Nalysis AND EsignDocument31 pagesS A D - I: Tructural Nalysis AND EsignRafiur RahmanNo ratings yet
- Stability, Shear and Moment in BeamsDocument36 pagesStability, Shear and Moment in Beamsyua nakamotoNo ratings yet
- Shearforceandbending Moment Diagrams (SFD & BMD) : Department of Architecture AastuDocument47 pagesShearforceandbending Moment Diagrams (SFD & BMD) : Department of Architecture AastuJesus is lordNo ratings yet
- CIVL2007 Introduction To Structural Engineering: Module 12 Lecture - Steel in Bending: Flexural MembersDocument48 pagesCIVL2007 Introduction To Structural Engineering: Module 12 Lecture - Steel in Bending: Flexural MembershvyvuyvNo ratings yet
- Chapter 6Document6 pagesChapter 6som_bs79No ratings yet
- Chapter 9 PDFDocument6 pagesChapter 9 PDFavseqNo ratings yet
- Shear Force and Bending Moment DiagramDocument12 pagesShear Force and Bending Moment DiagramBilal AkhundzadaNo ratings yet
- Internal Forces in BeamsDocument14 pagesInternal Forces in BeamsErikNo ratings yet
- S2-3 Torsion-14Document16 pagesS2-3 Torsion-14abouelrich188No ratings yet
- Lec2 CIVE1144 2013Document36 pagesLec2 CIVE1144 2013Joe TangNo ratings yet
- Stresses in BeamsDocument85 pagesStresses in BeamsY o oNo ratings yet
- CH 07Document9 pagesCH 07samaptapwNo ratings yet
- Beams and ReactionsDocument42 pagesBeams and ReactionsbackuponecolosoNo ratings yet
- Lecture 1 - Concept of Stresses and Strains PDFDocument74 pagesLecture 1 - Concept of Stresses and Strains PDFNophiNo ratings yet
- AAL PresentationDocument25 pagesAAL PresentationAydın GöğüşNo ratings yet
- Comb Ride Sign Manual Part IDocument294 pagesComb Ride Sign Manual Part IJan GnatNo ratings yet
- Kirsal KalkinmaDocument115 pagesKirsal KalkinmaAydın GöğüşNo ratings yet
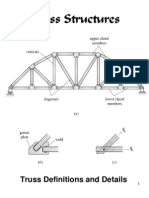
- CE 382 L5 - Truss Structures Engineering MechanicsDocument37 pagesCE 382 L5 - Truss Structures Engineering MechanicsAnnaIzzatNo ratings yet
- CE 382 L4 - Support ReactionsDocument35 pagesCE 382 L4 - Support ReactionsAydın GöğüşNo ratings yet
- Tributary Areas IIDocument16 pagesTributary Areas IIsea_jazzNo ratings yet
- CE 382 L1 - IntroDocument18 pagesCE 382 L1 - IntroAydın GöğüşNo ratings yet
- Rotational Motion Paper-2Document2 pagesRotational Motion Paper-2rkjha708No ratings yet
- Practical Riprap DesignDocument77 pagesPractical Riprap DesignMHavocNo ratings yet
- Brief Microfluidic CFD Simulation ExplanationDocument8 pagesBrief Microfluidic CFD Simulation ExplanationLuthviyah Choirotul MuhimmahNo ratings yet
- 978-0!00!818953-2 A Level Physics Support Materials Year 2, Sections 6, 7 and 8Document25 pages978-0!00!818953-2 A Level Physics Support Materials Year 2, Sections 6, 7 and 8Γιαννης Μπαζιωτης100% (2)
- Ford-Cups Us 2012Document9 pagesFord-Cups Us 2012Engr ShoaibNo ratings yet
- Massimo Blasone, Petr Jizba and Fabio Scardigli - Can Quantum Mechanics Be An Emergent Phenomenon?Document11 pagesMassimo Blasone, Petr Jizba and Fabio Scardigli - Can Quantum Mechanics Be An Emergent Phenomenon?VelveetNo ratings yet
- Is 11793 (1986)Document26 pagesIs 11793 (1986)slamienkaNo ratings yet
- Relativity 5Document23 pagesRelativity 5sharathNo ratings yet
- Slva 043 BDocument27 pagesSlva 043 BgagaddsfNo ratings yet
- 1a.vector Operations PDFDocument3 pages1a.vector Operations PDFRosy KaushikNo ratings yet
- Sheet Metal FormingDocument10 pagesSheet Metal FormingRenrenNanaNo ratings yet
- Solved Electricity Numerical For Class 10Document4 pagesSolved Electricity Numerical For Class 10sachin pant43% (7)
- PWMDocument7 pagesPWMsiddhartha_anirban100% (1)
- LearnEMC - Magnetic-Field Coupling (Inductive Coupling)Document3 pagesLearnEMC - Magnetic-Field Coupling (Inductive Coupling)danitranoster8512No ratings yet
- Science 9th ClassDocument1 pageScience 9th ClasskuldeepNo ratings yet
- ENGINEERING MECHANICS Module 1Document34 pagesENGINEERING MECHANICS Module 1rout79858No ratings yet
- Einstein, Albert (1879-1955), German-Born American Physicist and NobelDocument7 pagesEinstein, Albert (1879-1955), German-Born American Physicist and NobelGerlinde M SchmidtNo ratings yet
- Disperse DyesDocument8 pagesDisperse Dyessyed asim najamNo ratings yet
- Frenzel Self Test Chapter 9Document6 pagesFrenzel Self Test Chapter 9Aileen May Santillan HerreraNo ratings yet
- Tide ReportDocument11 pagesTide ReportAhmad AbdelsattarNo ratings yet
- Centrifugal Compressor Vibrations: Oil & Gas Customer Training CenterDocument44 pagesCentrifugal Compressor Vibrations: Oil & Gas Customer Training CenterBrahim Rostane100% (1)
- Karnataka 2nd PUC Mathematics Question Paper 2022Document18 pagesKarnataka 2nd PUC Mathematics Question Paper 2022Bharath SNo ratings yet
- Seminary 1 - Silo DesignDocument7 pagesSeminary 1 - Silo DesignJohnnie JohnNo ratings yet
- Hydra-Jar New TemplateDocument52 pagesHydra-Jar New Templatesaeed65100% (1)
- Separating Pigments of Chile Pepper Using Column Chromatography and Thin Layer ChromatographyDocument5 pagesSeparating Pigments of Chile Pepper Using Column Chromatography and Thin Layer ChromatographyKyleBernalÜNo ratings yet
- Neraca Massa Dan EnergiDocument53 pagesNeraca Massa Dan EnergiAstrid HerawatiNo ratings yet
- Degradation Mechanisms of Wire Ropes Operating On Multi-Layer Crane and Mine Hoisting Drums PDFDocument19 pagesDegradation Mechanisms of Wire Ropes Operating On Multi-Layer Crane and Mine Hoisting Drums PDFBruno SantosNo ratings yet
- Maths HW Ixth Igcse 30-03-2022 - 24873026Document10 pagesMaths HW Ixth Igcse 30-03-2022 - 24873026Aaryan GhagNo ratings yet