You might also like
- Beginning Digital Electronics through ProjectsFrom EverandBeginning Digital Electronics through ProjectsRating: 5 out of 5 stars5/5 (1)
- Ficha T+®cnica UR10 CB3Document1 pageFicha T+®cnica UR10 CB3Isaque OteiroNo ratings yet
- De La Salle University Mechanical Engineering Students Report on Types of Robotic ArmsDocument13 pagesDe La Salle University Mechanical Engineering Students Report on Types of Robotic ArmsMohammed AlmohjiliNo ratings yet
- VA1400 DataSheetDocument2 pagesVA1400 DataSheetVikram DewanganNo ratings yet
- IPLEX FX FeaturesDocument2 pagesIPLEX FX FeaturesAnonymous gFcnQ4goNo ratings yet
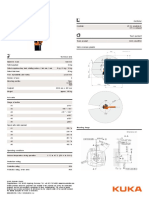
- Controller: Kuka Roboter GMBHDocument1 pageController: Kuka Roboter GMBHAlexander Rueda OrduzNo ratings yet
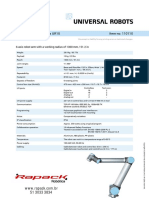
- Ur5 Technical Details Web A4 Art03 Rls EngDocument1 pageUr5 Technical Details Web A4 Art03 Rls EngAnanthan RameshNo ratings yet
- (English) S100 Technical Specification of Singa100 Robotic CameraDocument14 pages(English) S100 Technical Specification of Singa100 Robotic CameraMatias Contreras KöbrichNo ratings yet
- Manual Willis RTM-100Document11 pagesManual Willis RTM-100GioNo ratings yet
- Latest Toshiba ScaraDocument20 pagesLatest Toshiba ScarareflextechNo ratings yet
- Compact and Powerful IRB 140 Industrial RobotDocument2 pagesCompact and Powerful IRB 140 Industrial Robotcontrol555No ratings yet
- Ha020 Ha020.010l (E) ) 061030Document4 pagesHa020 Ha020.010l (E) ) 061030J Ferreyra LibanoNo ratings yet
- SSF2000Document2 pagesSSF2000sujinssridaNo ratings yet
- Juno Brochures INDocument5 pagesJuno Brochures INeclipser0067No ratings yet
- HDD Hk250t enDocument2 pagesHDD Hk250t enuriNo ratings yet
- UR10e Product Fact SheetDocument1 pageUR10e Product Fact SheetArmandoPérezValdiviaNo ratings yet
- Pr10031en R14 LRDocument2 pagesPr10031en R14 LRIstvan VeghNo ratings yet
- The Puma 500Document3 pagesThe Puma 500Elsa VelazquezNo ratings yet
- Operation ManualDocument28 pagesOperation ManualDaniel NituNo ratings yet
- User Manual For ModelDocument17 pagesUser Manual For ModelThe SellerNo ratings yet
- DH-SD40 42 42C23C-H PDFDocument5 pagesDH-SD40 42 42C23C-H PDFyassine aitlfakirNo ratings yet
- Specifications of Our Textile Testing EquipmentsDocument59 pagesSpecifications of Our Textile Testing EquipmentsMirza Zahidul AlamNo ratings yet
- Standard specifications for RS080N-B industrial robot arm and E02 controllerDocument5 pagesStandard specifications for RS080N-B industrial robot arm and E02 controllerAdrielSilvaNo ratings yet
- Ur5e RGB Fact Sheet Landscape A4Document1 pageUr5e RGB Fact Sheet Landscape A4Angel MartínezNo ratings yet
- TRUMPF TRUBEND 5230 Technical DataDocument11 pagesTRUMPF TRUBEND 5230 Technical DatacoronaqcNo ratings yet
- V 3030 AptDocument3 pagesV 3030 AptdimaswidjayaNo ratings yet
- VC450 750 EnglishDocument31 pagesVC450 750 EnglishDragan PerovicNo ratings yet
- CPM Series Machines: Product Finder Home PageDocument2 pagesCPM Series Machines: Product Finder Home PageawemetalNo ratings yet
- Cutter User's Manual: Setup, Operation & Maintenance GuideDocument38 pagesCutter User's Manual: Setup, Operation & Maintenance GuideNagaKBNo ratings yet
- CQ6280 For BJ-32120 Manual TornoDocument81 pagesCQ6280 For BJ-32120 Manual TornoJuan Daniel Frias Sosa100% (1)
- EPX2900Document2 pagesEPX2900Anupam Singh VatsNo ratings yet
- Medimeter Leaflet EnglishDocument2 pagesMedimeter Leaflet Englishmarketing.automatizatNo ratings yet
- PRZY-0.5 Turbo Balancer BrochureDocument5 pagesPRZY-0.5 Turbo Balancer Brochureedoy bmxNo ratings yet
- Prolift SCL/Prolift HD: Owner'S ManualDocument16 pagesProlift SCL/Prolift HD: Owner'S ManualMohammed Qaid AlathwaryNo ratings yet
- AltimeterDocument91 pagesAltimeterNazeem HammedNo ratings yet
- DECKEL - FP 3 NC - Offer - CNC Universal Tool Milling MaDocument1 pageDECKEL - FP 3 NC - Offer - CNC Universal Tool Milling MaCostin NastaseNo ratings yet
- Honetop-Rotary Packing Machine HT-8GDocument27 pagesHonetop-Rotary Packing Machine HT-8GNathaniel FernandesNo ratings yet
- Ato-750 Series Otdr v1Document10 pagesAto-750 Series Otdr v1diablo13No ratings yet
- Centrifuge Operating ManualDocument55 pagesCentrifuge Operating Manualagnaldo de souza MaloNo ratings yet
- 8 Pin Dip High Speed 1Mbit/S Transistor Photocoupler 6N135 6N136 EL450x SeriesDocument13 pages8 Pin Dip High Speed 1Mbit/S Transistor Photocoupler 6N135 6N136 EL450x SeriesLuis Angel CastreNo ratings yet
- SG90 9G Micro Servo Motor for RC ProjectsDocument2 pagesSG90 9G Micro Servo Motor for RC ProjectsESC crasciNo ratings yet
- CTX 310 eco Diagnostics Manual Faults and FailuresDocument30 pagesCTX 310 eco Diagnostics Manual Faults and FailuresJessica Roy50% (2)
- Catalogo TESA 2010 - Q PDFDocument22 pagesCatalogo TESA 2010 - Q PDFvijaybhaskarvlsNo ratings yet
- 4713 E EEM 4.1-3 Three-Phase Induction Motor With Squirrel Cage and Distinct Pull-Out Torque 300WDocument20 pages4713 E EEM 4.1-3 Three-Phase Induction Motor With Squirrel Cage and Distinct Pull-Out Torque 300WnebojsamitrovicNo ratings yet
- CNC Machining Centres: Magnum DZ 18 WDocument2 pagesCNC Machining Centres: Magnum DZ 18 WMerima CahtarevicNo ratings yet
- Hyundai Robot SeriesDocument8 pagesHyundai Robot SeriescarlenmilenaNo ratings yet
- SI 410 Weighing Indicator User ManualDocument64 pagesSI 410 Weighing Indicator User ManualShehab100% (2)
- SI+410+V1.11 User+ManualDocument58 pagesSI+410+V1.11 User+ManualFariza DianNo ratings yet
- F203 巴基斯坦 CCC 项目(6700 T/D) Side Suspended Boom Stacker (CBD600,720max/16) Side-type Scraper Reclaimer (CGQ200,250max/24) ManualDocument25 pagesF203 巴基斯坦 CCC 项目(6700 T/D) Side Suspended Boom Stacker (CBD600,720max/16) Side-type Scraper Reclaimer (CGQ200,250max/24) ManualOsama RehmanNo ratings yet
- 3 16eSIGMADocument67 pages3 16eSIGMAYAK KARIMNo ratings yet
- Import 19337Document6 pagesImport 19337Arthur SouzaNo ratings yet
- Features: GE Logiq F8Document2 pagesFeatures: GE Logiq F8ahmed_galal_waly1056No ratings yet
- Siglent Catalog 2015Document34 pagesSiglent Catalog 2015sava88No ratings yet
- SC-350 User ManualDocument38 pagesSC-350 User ManualplottersublimNo ratings yet
- Understanding and Servicing Alarm SystemsFrom EverandUnderstanding and Servicing Alarm SystemsRating: 1 out of 5 stars1/5 (1)
- British Commercial Computer Digest: Pergamon Computer Data SeriesFrom EverandBritish Commercial Computer Digest: Pergamon Computer Data SeriesNo ratings yet
- ABB SafeMove2 - Overview - External 2017Document25 pagesABB SafeMove2 - Overview - External 2017LMNNo ratings yet
- Amendment of ISO 13849-1Document9 pagesAmendment of ISO 13849-1Eduardo Ferreira100% (1)
- EX500 AP EX500 AC000 S S 050: SeriesDocument1 pageEX500 AP EX500 AC000 S S 050: SeriesLMNNo ratings yet
- RUC ControladorDocument42 pagesRUC ControladorLMNNo ratings yet
- Skype Lista CompletaDocument13 pagesSkype Lista CompletaLMNNo ratings yet
- To Download This SCADA Course, Please Visit : BY Business Industrial NetworkDocument10 pagesTo Download This SCADA Course, Please Visit : BY Business Industrial NetworkAbdul Qadir100% (1)
- Wireless Backhaul Challenges in 5G and BeyondDocument50 pagesWireless Backhaul Challenges in 5G and BeyondCarlosRivasNo ratings yet
- Open RANDocument53 pagesOpen RANschigullapally1993No ratings yet
- Nokia SukruthiDocument20 pagesNokia SukruthiSukruthi KCNo ratings yet
- Sheet 1Document11 pagesSheet 1Amir TarekNo ratings yet
- Chapter 4.2Document152 pagesChapter 4.2Pratham SuhasiaNo ratings yet
- scf238-01 5g Small Cell ProductdefinitionsDocument44 pagesscf238-01 5g Small Cell ProductdefinitionsBhargav GurrapuNo ratings yet
- GNodeB Initial Configuration Guide (MML-based) (V100R016C10 - 01) (PDF) - enDocument108 pagesGNodeB Initial Configuration Guide (MML-based) (V100R016C10 - 01) (PDF) - enIgorNo ratings yet
- DevNet Associate (Version 1.0) - Module 5 Exam Answers PDFDocument12 pagesDevNet Associate (Version 1.0) - Module 5 Exam Answers PDFsamar zantourNo ratings yet
- 5G-Advanced: January 2022 Antti Toskala, Matthew Baker, Sari Nielsen, Yannick LairDocument37 pages5G-Advanced: January 2022 Antti Toskala, Matthew Baker, Sari Nielsen, Yannick LairFerhat Sayin100% (1)
- Manual - IP - DNS - MikroTik WikiDocument5 pagesManual - IP - DNS - MikroTik Wikimona_mi8202No ratings yet
- Ipv4 and Ipv6 - Binary Conversion: Ipv4 Address 192.168.50.112 /24 Address in Binary Netmask in BinaryDocument12 pagesIpv4 and Ipv6 - Binary Conversion: Ipv4 Address 192.168.50.112 /24 Address in Binary Netmask in Binaryb LiewNo ratings yet
- Chapter 3.2 BDCDocument36 pagesChapter 3.2 BDCNishu Bade ShresthaNo ratings yet
- h12-711 Hcia-Security Qn12 29qnDocument9 pagesh12-711 Hcia-Security Qn12 29qnEDWARD KIWALABYENo ratings yet
- DHI-ARC3008C Datasheet 202006091Document2 pagesDHI-ARC3008C Datasheet 202006091RajaeNo ratings yet
- CS206 Course Handouts UpdatedDocument287 pagesCS206 Course Handouts UpdatedStylo TechNo ratings yet
- Network TopologyDocument27 pagesNetwork TopologyShivangi VermaNo ratings yet
- Malicious Activity Analysis of IoT Network Intrusion Detection SystemDocument38 pagesMalicious Activity Analysis of IoT Network Intrusion Detection SystemRamzel Renz Loto100% (1)
- Iot MCQDocument11 pagesIot MCQBiplab SarkarNo ratings yet
- 5G Technology: Towards Dynamic Spectrum Sharing Using Cognitive Radio NetworksDocument29 pages5G Technology: Towards Dynamic Spectrum Sharing Using Cognitive Radio NetworksHabib MohammedNo ratings yet
- Voyager PDFDocument2 pagesVoyager PDFvrtrivedi86No ratings yet
- User Manual: 1GE+1FE+1POTS+WIFI 1GE+3FE+2POTS+1USB+WIFI 1Ge+3Fe+2Pots+1Usb+Wifi+CatvDocument40 pagesUser Manual: 1GE+1FE+1POTS+WIFI 1GE+3FE+2POTS+1USB+WIFI 1Ge+3Fe+2Pots+1Usb+Wifi+CatvRaddit ExeNo ratings yet
- 6.3.3.7 Lab - Configuring 802.1Q Trunk-Based Inter-VLAN Routing - Goh Qiu Le (2015222)Document11 pages6.3.3.7 Lab - Configuring 802.1Q Trunk-Based Inter-VLAN Routing - Goh Qiu Le (2015222)Qiu LeNo ratings yet
- MK-PPT Chapter 1Document52 pagesMK-PPT Chapter 1Rhiza Joi NavallascaNo ratings yet
- DHCP scope for Windows and UNIX computersDocument7 pagesDHCP scope for Windows and UNIX computersNguyen BaNo ratings yet
- Small Cells TL - DEI - ZXSDR B8902 Product Description - V1.0 - 20181128Document19 pagesSmall Cells TL - DEI - ZXSDR B8902 Product Description - V1.0 - 20181128SkanNo ratings yet
- CBI-CIS Telemetry Interface RequirementsDocument11 pagesCBI-CIS Telemetry Interface RequirementsCK TangNo ratings yet
- Laboratory Experiment 4 - Configuration of The Local ServerDocument6 pagesLaboratory Experiment 4 - Configuration of The Local ServerJomer Robas TadenaNo ratings yet
- Huawei s9700 Series Switches DatasheetDocument42 pagesHuawei s9700 Series Switches DatasheetBahzadNo ratings yet
- 524-Article Text-2438-1-10-20230911Document10 pages524-Article Text-2438-1-10-20230911mabwfrh90No ratings yet
- Baleegh Ur Rehman - Resume1Document2 pagesBaleegh Ur Rehman - Resume1Baleegh RehmanNo ratings yet