0 ratings0% found this document useful (0 votes) 1K views5 pagesChapter 2 Example and Solution Block Diagram
Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content,
claim it here.
Available Formats
Download as PDF or read online on Scribd
EXAMPLE PROBLEMS AND SOLUTIONS
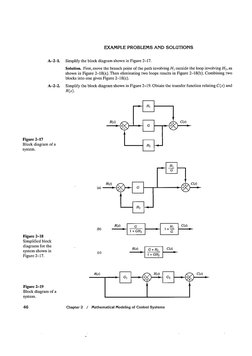
A241, Simplify the block diagram shown in Figure 2-17.
Solution. First, move the branch point of the path involving H, outside the loop involving Hs, as.
shown in Figure 2-18(a). Then eliminating two loops results in Figure 2-18(b). Combining two
blocks into one gives Figure 2-18{c).
A-22, Simplify the block diagram shown in Figure 2-19. Obtain the transfer function relating C(s) and
RG).
th
Rw ew
6
Figure 2-17
Block diagram of a i:
system.
Hy
Ge
Ro ow
® 6
tn
RG) G Cs)
» a
Figure 2-18
Simplified block
diagrams for the
system shown in iy A] ew LO
Figure 2-17. 1+Ghy
Figure 2-19
Block diagram of a
system.
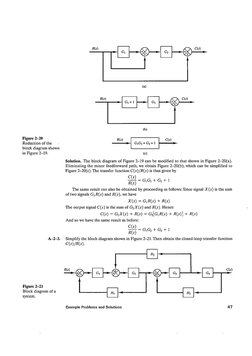
46 Chapter 2. / Mathematical Modeling of Control Systems�Figure 2-20
Reduction of the
block diagram shown
in Figure 2-19.
Figure 2-21
Block diagram of a
system.
Ro) i Q a & cw
@
©
RO) a),
SS] aarest
©
Solution. The block diagram of Figure 2-19 can be modified to that shown in Figure 2-20(a).
Eliminating the minor feedforward path, we obtain Figure 2-20(b), which ean be simplified to
Figure 2-20(c). The transfer function C(s)/R(s) is thus given by
C(s}
oo Gat G+1
R(s) Git
‘The same result can also be obtained by proceeding as follows: Since signal X(s) isthe sum
of two signals G(s) and R(s), we have
(3) = GiR() + RW)
‘The output signal C(s) is the sum of G,X(s) and R(s). Hence
C(s) = GX(s) + Rls) = GIG, R(s) + R(3)] + Rls)
‘And so we have the same result as before:
ob) _g
RG)
‘Simplify the block diagram shown in Figure 2-21. Then obtain the closed-loop transfer function
€(s)/R(S)
+Gt
Hy
2 @ fab @+fa--@+[a a}
Le
Example Problems and Solutions 47
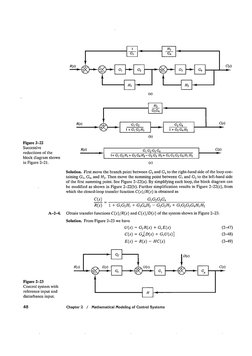
my th�Figure 2-22
Successive
reductions of the
block diagram shawn
in Figure 2-21.
Figure 2-23
‘Control system with,
reference input and
disturbance input.
48
7 a
@-[=p fa of{a
®
ms
GG
2) Gir Rg
GGG
oy
26) COG, ow
FOGMGGM-AGHsGGaamth [
©
Solution, First move the branch point between G, and G, to the right-hand side of the loop con-
taining Gs, Gy, and H. Then move the summing point between G, and Gyo the left-hand side
of the first summing point. See Figure 2-22(a). By simplifying each loop, the block diagram can
be modified as shown in Figure 2-22(). Further simplification results in Figure 2-22(c), from
which the closed-loop transfer function C(s)/R(s) is obtained as
ls) _ GiG.GGs
RG) TF GG, + GGith ~ GGsFh + GGG Fh
Obtain transfer functions C(s)/R(s) and C(s)/D(s) of the system shown in Figure 2-25.
Solution, From Figure 2-23 we have
U(s) = G/R(s) + GELS) 47)
ls) = G{D6) + GUES)] 48)
E(s) = R(s) = HC(s) (2-49)
oF Os)
RG) eo)
Ge
Chapter 2. / Mathematical Modeling of Control Systems�ADS.
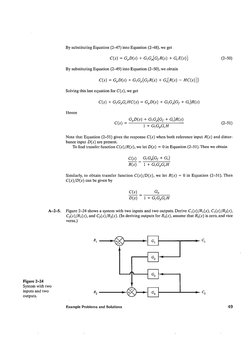
Figure 2-24
System with (wo
inputs and two
outputs,
By substituting Equation (2-47) into Equation (2-48), we get
ls) = 6,018) + GG LG,RS) + GE] 2-80)
By substituting Equation (2-49) into Equation (2-50), we obtain
ls) = G(s) + ,G,{G,R(s) + GLR(3) ~ HC(s)]}
Solving this last equation for C(s), we get
Cls) + G,G,G,HC(s) = G,D(s) + G.G,(G; + GIR(s)
Hence
G(s) + AGAGy + G)R(s)
ae T+ GG,GF
(251)
Note that Equation (2-51) gives the response C(s} when both reference input R(s) and distur
‘bance input D(s) are preseat.
To find transfer function C(s)/R(s}, we let D(s) = 0 in Equation (2-51). Then we obtain
GiGAG; + G)
oo)
Similarly, to obtain transfer function C(s)/D(s), we let R(s) = 0 in Equation (2-51).’Then
C{s)/D(3) can be given by
cs) G,
Ds) 1+ G.G,GH
Figure 2-24 shows a system with two inputs and two outputs. Derive C,(s)/Ry(s), Ci(s}/Ra(s),
Cq(s)/Ry(s)-and C,(s) /R,(s). (In deriving outputs for Ry(s), assume that Ry(s) is zero, and vice
versa.)
.—+@-—+
&y ————+ {
Example Problems and Solutions: 49�50
Solution. From the figure, we obtain
1 = GIR, ~ GC) (2-52)
C= GR ~ GC) 0-83)
By substituting Equation (2-83) into Equation (2-S2),we obtain
GR — GG{R2 - G:C\)] (2-54)
By substituting Equation (2-52) into Equation (2-53), we get,
C= GIR: ~ GG(R, ~ GsC;)] (2-85)
Solving Equation (2-54) for C,, we obtain
GAR, = GGGRy a
1~ GG.GG, fee
Solving Equation (2-55) for C; gives
AGrGsRy + GsRy
Gy = GER + Gay 57
GOs
Equations (2-56) and (2-57) can be combined in the form of the transfer matrix as follows:
G, GGG.
a] _| T-aaae GG | R,
Cy. GG:Gs Ry,
“I-GG.GG 1-GGG,G,
‘Then the transfer functions Cy(s}/Ry(s}.Cy(s)/R(s), s(s)/Ry(s) and Cx(s)/Ry(s) ean be obtained
as follon
els)
Ri(s)
is)
Ri)
Note that Equations (2-56) and (2-57) give responses C, and Cy, respectively, when both inputs
Ryand Rs ate present.
Notice that when R(s) = 0, the original block diagram can be simplified to those shown in
Figures 2-25(a) and (b). Similarly, when Rj(s) = 0, the original block diagram can be simplified
to those showin in Figures 2-25(c) and (d). From these simplified block diagrams we can also ob
tain Cy(s) /Ry(s), C(s)/Ri(s), C\(s)/Ra(s), and Cy(s)/Ra(s), a8 showa to the right of each eorre-
sponding block diagram,
Chapter 2 / Mathematical Modeling of Control Systems