You might also like
- Automatic TransmissionDocument36 pagesAutomatic TransmissionIfeanyi IgwegbeNo ratings yet
- Automatic Gear TransmissionDocument11 pagesAutomatic Gear TransmissionIntruder 47100% (1)
- Fundamentals of Automatic TransmissionsDocument220 pagesFundamentals of Automatic TransmissionsAndrés Arias100% (7)
- Automotive Transmission: Clutch and Gear BoxDocument28 pagesAutomotive Transmission: Clutch and Gear BoxMohan100% (1)
- Automatic TransmissionDocument20 pagesAutomatic TransmissionAravindSaju100% (3)
- HW19710 Transmission System Repair ManualDocument78 pagesHW19710 Transmission System Repair Manualsample name80% (5)
- Transmission SystemDocument61 pagesTransmission SystemaravindNo ratings yet
- Proportioning Concrete Mixtures With Graded AggregatesDocument86 pagesProportioning Concrete Mixtures With Graded AggregatesM HAFEEZ RAJA100% (2)
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsFrom EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsNo ratings yet
- Tractor TransmissionDocument6 pagesTractor TransmissionParminder ParryNo ratings yet
- Transmission (Mechanics) PDFDocument11 pagesTransmission (Mechanics) PDFFrancisco Botella JuanNo ratings yet
- Panchakarma Process PDFDocument6 pagesPanchakarma Process PDFPartheebanNo ratings yet
- Joe Cell ConstructionDocument11 pagesJoe Cell ConstructionNico Neubauer100% (3)
- Man GN PDF 6Document36 pagesMan GN PDF 6Adrian A UPD78% (9)
- MARY, Woman of Faith, Hope, Love (Lyrics & Chords)Document2 pagesMARY, Woman of Faith, Hope, Love (Lyrics & Chords)Jessa Marie Maquiling88% (8)
- GearboxesDocument70 pagesGearboxesanand007krishnan0% (1)
- Dual Clutch TransmissionDocument18 pagesDual Clutch TransmissionsandipNo ratings yet
- Multiple Chemical Sensitivities - Addendum To Biologic Markers in ImmunotoxicologyDocument207 pagesMultiple Chemical Sensitivities - Addendum To Biologic Markers in ImmunotoxicologyCarlos RodriguezNo ratings yet
- Automatic Transmission ReportDocument15 pagesAutomatic Transmission ReportDinesh ChahalNo ratings yet
- Semi Automatic Transmission ReportDocument52 pagesSemi Automatic Transmission ReportPranav EkhandeNo ratings yet
- ME 323 Lab 4-Omar AlfahadDocument9 pagesME 323 Lab 4-Omar Alfahadengineer.mohammedtahhanNo ratings yet
- Ijme V2i6p107Document5 pagesIjme V2i6p107Atthuru ManikantaNo ratings yet
- Sharath 2 Clutch-1Document22 pagesSharath 2 Clutch-1lhooks.infyNo ratings yet
- Lecture 8 Transmission PDFDocument6 pagesLecture 8 Transmission PDFabdul quadirNo ratings yet
- Transmission MechanicsDocument10 pagesTransmission MechanicsSesan FesobiNo ratings yet
- Manual 012Document60 pagesManual 012Rixwan Bin ShabirNo ratings yet
- Chapter 2Document22 pagesChapter 2avinashNo ratings yet
- Automatic Transmission SystemDocument6 pagesAutomatic Transmission SystemjadeNo ratings yet
- Transmission System: Windmills Horse Steam Engines Pumping Milling HoistingDocument9 pagesTransmission System: Windmills Horse Steam Engines Pumping Milling Hoistingajay mauryaNo ratings yet
- 36 Ranbir SinghDocument5 pages36 Ranbir SinghBbaPbaNo ratings yet
- What Is A Gearbox? (Transmission) - Types, Parts, Function & DiagramDocument14 pagesWhat Is A Gearbox? (Transmission) - Types, Parts, Function & DiagramTisha GaikwadNo ratings yet
- Propulsion TransmissionDocument15 pagesPropulsion TransmissionAssassin's j :uNo ratings yet
- Final ReportDocument37 pagesFinal ReportAliNo ratings yet
- Seminar FinalDocument21 pagesSeminar FinalLOKENDRA91No ratings yet
- Geer box-WPS OfficeDocument6 pagesGeer box-WPS OfficeYosef EphremNo ratings yet
- Design of The Differential For A Truck Brand Ford Model Ranger 1998Document22 pagesDesign of The Differential For A Truck Brand Ford Model Ranger 1998Mishu MalesNo ratings yet
- Gear BoxDocument13 pagesGear BoxLoga NathanNo ratings yet
- Transmission (Mechanics) : Navigation Search Gearbox Software Gear TrainDocument6 pagesTransmission (Mechanics) : Navigation Search Gearbox Software Gear TrainSelva KumarNo ratings yet
- ME 323 Lab 4 Mohammed Ahmed Tahhan 392027113Document10 pagesME 323 Lab 4 Mohammed Ahmed Tahhan 392027113engineer.mohammedtahhanNo ratings yet
- Kassahun Tadess GeerboxDocument16 pagesKassahun Tadess Geerboxabubekery61No ratings yet
- Transmission (Mechanics) : Navigation Search Gearbox Software Gear TrainDocument9 pagesTransmission (Mechanics) : Navigation Search Gearbox Software Gear TrainbaktinusantaraNo ratings yet
- Transmission NoteDocument6 pagesTransmission Notesyariza ismailNo ratings yet
- Tfe Module 3Document14 pagesTfe Module 3Anandhu ANo ratings yet
- AUTOMOTIVEpower Drive Train MODULE 2Document17 pagesAUTOMOTIVEpower Drive Train MODULE 2Selazinap LptNo ratings yet
- Lecture Notes On Automatic Transmission System e DDocument74 pagesLecture Notes On Automatic Transmission System e Dboafoenoch2020No ratings yet
- Hotchkiss Drive RearDocument17 pagesHotchkiss Drive RearravivpsNo ratings yet
- Module 3 - Lesson 1 - MEEC 101A PDFDocument8 pagesModule 3 - Lesson 1 - MEEC 101A PDFErica May MundinaNo ratings yet
- Howo TransmisionDocument81 pagesHowo TransmisionMantenimiento Mecanico BiddleNo ratings yet
- Advancements of Automatic Gear Transmission SystemsDocument21 pagesAdvancements of Automatic Gear Transmission SystemsKavindu Umayanga100% (1)
- Activity Report Making The Gears Use The Frais Machine Pt. Minanga OganDocument8 pagesActivity Report Making The Gears Use The Frais Machine Pt. Minanga OganFirdaAtikaNo ratings yet
- Transmission System NIT SILCGARDocument22 pagesTransmission System NIT SILCGARSuyashNo ratings yet
- Group 8Document17 pagesGroup 8abebe zewduNo ratings yet
- DCT PDFDocument7 pagesDCT PDFParth ParikhNo ratings yet
- Construction of A Constant Mesh Gear BoxDocument21 pagesConstruction of A Constant Mesh Gear BoxAmare Eshetie0% (1)
- Study On Differential Gear System For The Power Transmission To The Rear Wheels of A Passenger BusDocument15 pagesStudy On Differential Gear System For The Power Transmission To The Rear Wheels of A Passenger Busakib1875No ratings yet
- Gear Box Design Project Two: Faculity of Mechanical and Industrial EngineeringDocument131 pagesGear Box Design Project Two: Faculity of Mechanical and Industrial Engineeringnigusu sisayNo ratings yet
- Second ReportDocument14 pagesSecond ReportMy ProNo ratings yet
- 6th Semestermechanical Automobile Engineering Lab ManualDocument21 pages6th Semestermechanical Automobile Engineering Lab ManualSayan BiswasNo ratings yet
- DCT Dual Clutch TransmissionDocument16 pagesDCT Dual Clutch TransmissionSudharshan SrinathNo ratings yet
- Unit 1 Introduction To Automobile Engineering: StructureDocument6 pagesUnit 1 Introduction To Automobile Engineering: StructureSeth BeckNo ratings yet
- Four Cylinder Engine: Figure 1-Slider Crank Mechanism in An EngineDocument6 pagesFour Cylinder Engine: Figure 1-Slider Crank Mechanism in An EngineRamsey MejiNo ratings yet
- Automotive Driveline Overview PDFDocument8 pagesAutomotive Driveline Overview PDFKarniNo ratings yet
- Developer Job AdvertDocument2 pagesDeveloper Job AdvertVictor SibandaNo ratings yet
- Job Advert Ncs Comm and RecruitDocument1 pageJob Advert Ncs Comm and RecruitVictor SibandaNo ratings yet
- Senior Lead Electrical EngineerDocument1 pageSenior Lead Electrical EngineerVictor SibandaNo ratings yet
- Ad SpecificsDocument8 pagesAd SpecificsVictor SibandaNo ratings yet
- Electrical Engineering Definitions, Basic LawsDocument2 pagesElectrical Engineering Definitions, Basic LawsVictor SibandaNo ratings yet
- New Start Site: Johannesburg Month: March 2011 Contact Tel: (011) 833 0428/9 Cell: 083 228 7232Document3 pagesNew Start Site: Johannesburg Month: March 2011 Contact Tel: (011) 833 0428/9 Cell: 083 228 7232Victor SibandaNo ratings yet
- PowerDocument1 pagePowerVictor SibandaNo ratings yet
- Chemistry XI STBB MOC 2023Document3 pagesChemistry XI STBB MOC 2023Habib U Zaman MemonNo ratings yet
- Mapping Skills (India) For 10th Class - Paper 1Document61 pagesMapping Skills (India) For 10th Class - Paper 1Faltu KekaamNo ratings yet
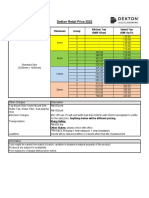
- Dekton Retail Price List 2022Document1 pageDekton Retail Price List 2022BULLETNo ratings yet
- Full Download Test Bank For Fundamental Statistics For The Behavioral Sciences 9th Edition David C Howell PDF Full ChapterDocument34 pagesFull Download Test Bank For Fundamental Statistics For The Behavioral Sciences 9th Edition David C Howell PDF Full Chapterwidenessnugae09hc1100% (20)
- DNP MLM PDFDocument385 pagesDNP MLM PDFRam 2000No ratings yet
- Stainless Steel Wires For Flux Cored Welding: Afrox Coremax 308LPDocument3 pagesStainless Steel Wires For Flux Cored Welding: Afrox Coremax 308LPBranko FerenčakNo ratings yet
- Math 102 Final Exam Spring2016Document11 pagesMath 102 Final Exam Spring2016Tristan HilderbrandNo ratings yet
- Eurotile Pricelist2015Document147 pagesEurotile Pricelist2015Mario Esaúl MirelesNo ratings yet
- White: Photoreactive Resin For Form 1, Form 1+, Form 2Document8 pagesWhite: Photoreactive Resin For Form 1, Form 1+, Form 2Ivan SimicNo ratings yet
- Bayesian Structural Time Series ModelsDocument100 pagesBayesian Structural Time Series ModelsClaudyaNo ratings yet
- Formulir Review Judul Skripsi 2019 (Update 28 Maret 2019) Kevin ThenediDocument2 pagesFormulir Review Judul Skripsi 2019 (Update 28 Maret 2019) Kevin ThenediKevin ThenediNo ratings yet
- SUB: Physical Chemistry Topic: Solubilization, Micellar Catalysis, Micro Emulsions, Reverse Micelles, Characterization of Micro EmulsionsDocument30 pagesSUB: Physical Chemistry Topic: Solubilization, Micellar Catalysis, Micro Emulsions, Reverse Micelles, Characterization of Micro EmulsionsVijay PradhanNo ratings yet
- Modified Lightweight Gift Cipher For Security Enhancement in Resource Constrained Iot DevicesDocument13 pagesModified Lightweight Gift Cipher For Security Enhancement in Resource Constrained Iot Deviceslavanyakoyya319No ratings yet
- OR - QB (Module 1&2 PDFDocument10 pagesOR - QB (Module 1&2 PDFAasim InamdarNo ratings yet
- OpusRSE-ICCT Fieldwork Warsaw 25-08-2021Document21 pagesOpusRSE-ICCT Fieldwork Warsaw 25-08-2021asmasherNo ratings yet
- BiomechanicsDocument9 pagesBiomechanicsMuhammad HamzaNo ratings yet
- The Role of Firm Size As A Moderating Variable On The Effect of Working Capital Management On The Profitability of Public Companies in IndonesiaDocument16 pagesThe Role of Firm Size As A Moderating Variable On The Effect of Working Capital Management On The Profitability of Public Companies in Indonesiaindex PubNo ratings yet
- Evaporation Mechanisms in Liquids Cammenga PDFDocument2 pagesEvaporation Mechanisms in Liquids Cammenga PDFLamarNo ratings yet
- The Development of Incentive For Marginal OilfieldsDocument9 pagesThe Development of Incentive For Marginal OilfieldsBenny LubiantaraNo ratings yet
- 1.1.3.11 Lab - Draw A Process DiagramDocument4 pages1.1.3.11 Lab - Draw A Process DiagramJoshua ManalotoNo ratings yet
- DM md6x4Document2 pagesDM md6x4faruk604No ratings yet
- Ferrari On FroomeDocument2 pagesFerrari On FroomeRaceRadioNo ratings yet
- Hibon NX Serisi Blover Katalogu - IngilizceDocument8 pagesHibon NX Serisi Blover Katalogu - IngilizceDocu CenterNo ratings yet
- FSA201906-FMAX Footstep ReplacementDocument4 pagesFSA201906-FMAX Footstep ReplacementmarianchiNo ratings yet
- Why Not Lingaraja .... Why Only Devaraja ?Document10 pagesWhy Not Lingaraja .... Why Only Devaraja ?Uday DokrasNo ratings yet