You might also like
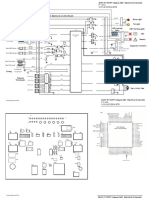
- R1150RT IABS Electric Diagram V1.0Document3 pagesR1150RT IABS Electric Diagram V1.0Zeljko Tanasic50% (2)
- A PPT On Accelerated Stability StudiesDocument16 pagesA PPT On Accelerated Stability StudiesShrikanth Varma Bandi100% (2)
- TAD1150-1152VE: Low Cost of OwnershipDocument2 pagesTAD1150-1152VE: Low Cost of OwnershipTioNo ratings yet
- Astm D 1037 1999Document31 pagesAstm D 1037 1999Shubham SharmaNo ratings yet
- 13 Freq Response AICDocument84 pages13 Freq Response AICDavid BayuNo ratings yet
- Arijit Nath - Bode PlotDocument6 pagesArijit Nath - Bode PlotTry meNo ratings yet
- Lecture 9-10 - Frequency Response MethodsDocument68 pagesLecture 9-10 - Frequency Response MethodsDerrick Maatla Moadi100% (1)
- Module 1: Transfer Functions and Frequency ResponsesDocument49 pagesModule 1: Transfer Functions and Frequency ResponsesAdil AbouelhassanNo ratings yet
- EE 4130lab7Document6 pagesEE 4130lab7kattepoguNo ratings yet
- Whatis Frequency Response?Document32 pagesWhatis Frequency Response?Arshiya Kousar MNo ratings yet
- Bode PlotDocument22 pagesBode PlotEr Akhilesh SinghNo ratings yet
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesDocument14 pagesPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipeNo ratings yet
- 10 1 1 112 2812Document49 pages10 1 1 112 2812Abdulazeez Ayomide AdebimpeNo ratings yet
- NI Tutorial 6450 enDocument11 pagesNI Tutorial 6450 enAkhil GuptaNo ratings yet
- Type 3 Compensator DesignDocument6 pagesType 3 Compensator DesignĐơn Giản ThôiNo ratings yet
- Design Type II Compensation in A Systematic Way: Gain and Phase CharacteristicsDocument10 pagesDesign Type II Compensation in A Systematic Way: Gain and Phase CharacteristicsSunilNo ratings yet
- CS-Lab Assignment-6 1913123Document35 pagesCS-Lab Assignment-6 1913123karthik rajuNo ratings yet
- An Analog-Friendly Approach Simplifies Digital CompensationDocument4 pagesAn Analog-Friendly Approach Simplifies Digital CompensationARob109No ratings yet
- CS Unit-3Document16 pagesCS Unit-3auchthram143No ratings yet
- 1 Bode PlotDocument6 pages1 Bode PlotAdithya AdigaNo ratings yet
- A ROM-Less Direct Digital Frequency Synthesizer Based On Bezier Curve ApproximationDocument4 pagesA ROM-Less Direct Digital Frequency Synthesizer Based On Bezier Curve ApproximationYermakov Vadim IvanovichNo ratings yet
- Lab 8Document12 pagesLab 8awalu23No ratings yet
- Compensation Method Peak Current Mode Control Buck AN028 enDocument13 pagesCompensation Method Peak Current Mode Control Buck AN028 ensadqazwsxNo ratings yet
- AND8143/D A General Approach For Optimizing Dynamic Response For Buck ConverterDocument10 pagesAND8143/D A General Approach For Optimizing Dynamic Response For Buck ConverterAMSA84No ratings yet
- Control-Systems Lab (080-096)Document17 pagesControl-Systems Lab (080-096)Gangula Praneeth ReddyNo ratings yet
- A General Approach For Optimizing Dynamic Response For Buck ConverterDocument10 pagesA General Approach For Optimizing Dynamic Response For Buck ConverterDiogo RodriguesNo ratings yet
- Bode Plots OverviewDocument71 pagesBode Plots OverviewibinhabeebNo ratings yet
- EP 5511 - Lecture 07Document33 pagesEP 5511 - Lecture 07Solomon Tadesse AthlawNo ratings yet
- Polyphase ShifterDocument14 pagesPolyphase ShifterMarija VeljkovicNo ratings yet
- Analog Integrated CircuitsDocument47 pagesAnalog Integrated CircuitsDan GoleaNo ratings yet
- Low Power Cmos VgaDocument7 pagesLow Power Cmos VgaMohammad Ayatullah MaktoomNo ratings yet
- DSP Assignment 3Document11 pagesDSP Assignment 3anoopk778No ratings yet
- Control Systems Engineering LectureDocument14 pagesControl Systems Engineering LectureMpho SeniorNo ratings yet
- Bod ElectDocument14 pagesBod ElectPrema Vinod PatilNo ratings yet
- Unit Iii Frequency ResponseDocument28 pagesUnit Iii Frequency ResponseRaghu RamNo ratings yet
- 8.3.3. Another Example: Chapter 8. Converter Transfer FunctionsDocument3 pages8.3.3. Another Example: Chapter 8. Converter Transfer FunctionsIEQQ02No ratings yet
- Calculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station PrefaceDocument11 pagesCalculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station Prefaceh_salkicNo ratings yet
- BPSKDocument15 pagesBPSKKevin ChangNo ratings yet
- Lab 5 ControlDocument6 pagesLab 5 ControlAyaz AhmadNo ratings yet
- Characterization of High-Q Resonators For Microwave Filter ApplicationsDocument4 pagesCharacterization of High-Q Resonators For Microwave Filter ApplicationshazardassNo ratings yet
- Function GeneratorDocument13 pagesFunction GeneratorDilJalaayNo ratings yet
- Discretization of The '59 Fender Bassman Tone StackDocument5 pagesDiscretization of The '59 Fender Bassman Tone StackVadim DrokovNo ratings yet
- Very Good Bode Plot TutorialDocument5 pagesVery Good Bode Plot TutorialsukusportyNo ratings yet
- Curtis Mayberry Final Report ECE4415 LNA ProjectDocument28 pagesCurtis Mayberry Final Report ECE4415 LNA ProjectZarion JacobsNo ratings yet
- Low Noise AmplifierDocument10 pagesLow Noise AmplifierrallabhandiSKNo ratings yet
- Analog Signals Digital Signals Analog-To-Digital ConverterDocument39 pagesAnalog Signals Digital Signals Analog-To-Digital ConverterAishwarya SumaNo ratings yet
- Phase Estimation Algorithm For Frequency Hopped Binary PSK and DPSK Waveforms With Small Number of Reference SymbolsDocument6 pagesPhase Estimation Algorithm For Frequency Hopped Binary PSK and DPSK Waveforms With Small Number of Reference SymbolsAsim MazinNo ratings yet
- Amplitude ModulationDocument6 pagesAmplitude ModulationHafid AlifiantoNo ratings yet
- ps5 Thermal GuideDocument6 pagesps5 Thermal GuideSundaramNo ratings yet
- Tutorial III Root Locus DesignDocument25 pagesTutorial III Root Locus DesignNur DalilaNo ratings yet
- Antenna Azimuth:An Introduction To Position Control SystemsDocument4 pagesAntenna Azimuth:An Introduction To Position Control SystemsMpho Senior0% (1)
- A Two Op-A Mps Third-Order Modulator With Complex Conjugate NTF ZerosDocument4 pagesA Two Op-A Mps Third-Order Modulator With Complex Conjugate NTF ZerosPham Viet ThanhNo ratings yet
- Eee 523 ProjDocument12 pagesEee 523 ProjBodhayan PrasadNo ratings yet
- IN 227 Control Systems Design: Lectures 7 and 8Document15 pagesIN 227 Control Systems Design: Lectures 7 and 8AbhinavNo ratings yet
- Linear Control System (Practical) : Lab Instructor: Engr. Rabbia SiddiqueDocument28 pagesLinear Control System (Practical) : Lab Instructor: Engr. Rabbia SiddiqueM Yasir AnjumNo ratings yet
- AS3842Document10 pagesAS3842kik020No ratings yet
- GMSK Demodulator Using Costas Loop For Software-Defined RadioDocument5 pagesGMSK Demodulator Using Costas Loop For Software-Defined RadioRanjith ReddyNo ratings yet
- Bode Plot Design PDFDocument15 pagesBode Plot Design PDFsmileuplease8498No ratings yet
- Design of Phase-Lead CompensatorDocument13 pagesDesign of Phase-Lead CompensatorAsif MudgalNo ratings yet
- Transitions from Digital Communications to Quantum Communications: Concepts and ProspectsFrom EverandTransitions from Digital Communications to Quantum Communications: Concepts and ProspectsNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- M CAPS 5 PhysicsDocument4 pagesM CAPS 5 PhysicsDillen JoeNo ratings yet
- 0077083a7 PDFDocument1 page0077083a7 PDFMarcel BlinduNo ratings yet
- Part 3 Linear Closed-Loop SystemsDocument14 pagesPart 3 Linear Closed-Loop Systemsaery2001No ratings yet
- High-Precision Fiber Optical GyroscopeDocument1 pageHigh-Precision Fiber Optical Gyroscopemichael_graciasNo ratings yet
- How Do Solar Panel WorkDocument34 pagesHow Do Solar Panel Worklambanaveen123No ratings yet
- PBL Technical Report FormatDocument4 pagesPBL Technical Report FormatVinz ChiaNo ratings yet
- Maho CNC Lathe - Mt-Series PDFDocument25 pagesMaho CNC Lathe - Mt-Series PDFSRiyanto09No ratings yet
- Sousa Et Al, 2021Document25 pagesSousa Et Al, 2021MilaHumeNo ratings yet
- Scrum Gantt Chart With BurndownDocument4 pagesScrum Gantt Chart With BurndownAsma Afreen ChowdaryNo ratings yet
- Densitas WaterDocument3 pagesDensitas WaterFathur Deka ApriandaNo ratings yet
- Cable Bus Brochure 2010Document32 pagesCable Bus Brochure 2010freze2978No ratings yet
- Game Theory With Mixed StrategyDocument16 pagesGame Theory With Mixed StrategyMath DepartmentNo ratings yet
- History of The Periodic Table - WikipediaDocument6 pagesHistory of The Periodic Table - WikipediazeeshanNo ratings yet
- PRACTICAL 10 (Java)Document16 pagesPRACTICAL 10 (Java)6209 Bhavesh PatilNo ratings yet
- Question ElectricDocument12 pagesQuestion Electricmaxime78540No ratings yet
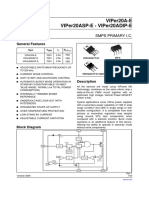
- Viper20A-E Viper20Asp-E - Viper20Adip-E: General FeaturesDocument33 pagesViper20A-E Viper20Asp-E - Viper20Adip-E: General FeaturesAdriánNo ratings yet
- AutoCAD ResourceDocument2 pagesAutoCAD ResourceAmolNo ratings yet
- Syllabus Activity PointsDocument56 pagesSyllabus Activity PointssalmanNo ratings yet
- Subharmonic Stability Limits For The Buck Converter With Ripple-Based Constant On-Time Control and Feedback FilterDocument8 pagesSubharmonic Stability Limits For The Buck Converter With Ripple-Based Constant On-Time Control and Feedback FilterAparna ShajiNo ratings yet
- User Navigation Pattern Prediction From Web Log Data: A SurveyDocument6 pagesUser Navigation Pattern Prediction From Web Log Data: A SurveyIJMERNo ratings yet
- Van Den Berg Product BrochureDocument10 pagesVan Den Berg Product BrochureJose Gustavo Quilca Vilcapoma100% (1)
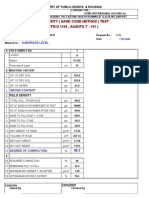
- Field Density (Sand Cone Method) Test (ASTM D 1556, AASHTO T - 191)Document5 pagesField Density (Sand Cone Method) Test (ASTM D 1556, AASHTO T - 191)m8877223No ratings yet
- Lectura 1Document13 pagesLectura 1maria isabel VidalNo ratings yet
- Example 2.1. Design of A Slab System Including Five SlabsDocument26 pagesExample 2.1. Design of A Slab System Including Five Slabscan gulerNo ratings yet
- Fatigue Life Analysis of Joint Bar of Insulated Rail JointDocument7 pagesFatigue Life Analysis of Joint Bar of Insulated Rail JointIJARP PublicationsNo ratings yet
- Corrosion Rate MeasurementsDocument27 pagesCorrosion Rate MeasurementsedwinNo ratings yet