You might also like
- RC5 - 5B Automatic Superspeed Refrigerated CentrifugesDocument245 pagesRC5 - 5B Automatic Superspeed Refrigerated CentrifugesHector Pons83% (12)
- Hybrid Power System With A Controlled Energy Storage: PreprintDocument9 pagesHybrid Power System With A Controlled Energy Storage: Preprintrpk8585No ratings yet
- Pitch-Controlled Variable-Speed Wind Turbine Generation: E. Muljadi and C.P. ButterfieldDocument10 pagesPitch-Controlled Variable-Speed Wind Turbine Generation: E. Muljadi and C.P. ButterfieldminastirNo ratings yet
- Modeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabDocument12 pagesModeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabIAEME PublicationNo ratings yet
- Power Quality Issues in A Hybrid Power System: PreprintDocument12 pagesPower Quality Issues in A Hybrid Power System: PreprintsimbarasheNo ratings yet
- Calidad de La EnergiaDocument11 pagesCalidad de La Energiamielle ricardoNo ratings yet
- Effect of AVR and PSS Onpower System TRansient) Wind MSDocument7 pagesEffect of AVR and PSS Onpower System TRansient) Wind MSmariaNo ratings yet
- Modeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabDocument13 pagesModeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabSeid EndrisNo ratings yet
- Symmetrical and Unsymmetrical Fault CurrDocument10 pagesSymmetrical and Unsymmetrical Fault Currouali fatehNo ratings yet
- Critial Analysis of Methods For Mathematical Modelling of Wind TurbinesDocument23 pagesCritial Analysis of Methods For Mathematical Modelling of Wind TurbinesElectricidad IngecablesNo ratings yet
- Improved Reactive Power Capability With Grid Connected Doubly Fed Induction GeneratorDocument24 pagesImproved Reactive Power Capability With Grid Connected Doubly Fed Induction GeneratorUday WankarNo ratings yet
- Modeling of Wind Turbines Based On DFIGDocument8 pagesModeling of Wind Turbines Based On DFIGAida AdylbekovaNo ratings yet
- Design and Fabrication of Exhaust Gas Heat Recovery Power Generation SystemDocument7 pagesDesign and Fabrication of Exhaust Gas Heat Recovery Power Generation SystemIJRASETPublicationsNo ratings yet
- Pitch Controlled Variable Speed For WTDocument10 pagesPitch Controlled Variable Speed For WTArikson SantanaNo ratings yet
- Short-Circuit Modeling of A Wind Power PlantDocument12 pagesShort-Circuit Modeling of A Wind Power PlantDavid Jose Poma GuillenNo ratings yet
- A Conservative Control Strategy For Variable-Speed Stall-Regulated Wind TurbinesDocument10 pagesA Conservative Control Strategy For Variable-Speed Stall-Regulated Wind Turbinesamro_mahdyNo ratings yet
- Reactive Power Compensation of Grid Using: Doubly-Fed Induction Generator (DFIG)Document22 pagesReactive Power Compensation of Grid Using: Doubly-Fed Induction Generator (DFIG)mallanna4blogs100% (1)
- Symmetrical and Unsymmetrical Fault Currents of A Wind Power PlantDocument10 pagesSymmetrical and Unsymmetrical Fault Currents of A Wind Power PlantsquarehandsomeNo ratings yet
- Converter Protection Scheme For DoublConverter Doubly-Fed Induction Generators During DisturbancesDocument5 pagesConverter Protection Scheme For DoublConverter Doubly-Fed Induction Generators During DisturbancesijcsnNo ratings yet
- Optimized Hydrogen and Electricity Generation From Wind: June 2003 - NREL/TP-500-34364Document12 pagesOptimized Hydrogen and Electricity Generation From Wind: June 2003 - NREL/TP-500-34364Sabin LalNo ratings yet
- (Ebook - Electricity) An IGBT Inverter For Interfacing Small Scale Wind Generators To Single Phase Distributed Power Generation SystemDocument12 pages(Ebook - Electricity) An IGBT Inverter For Interfacing Small Scale Wind Generators To Single Phase Distributed Power Generation SystemfranciscoNo ratings yet
- Electrical Paper-Oil Transformers and The Requirement For High Quality Adsorbing Desiccants To Prolong Transformer LifeDocument5 pagesElectrical Paper-Oil Transformers and The Requirement For High Quality Adsorbing Desiccants To Prolong Transformer LifekamaladonNo ratings yet
- Challenges of Integrating Large Amounts of WindDocument7 pagesChallenges of Integrating Large Amounts of WindhananwarNo ratings yet
- Transient Analysis and Modeling of Wind Generator During Power and Grid Voltage DropDocument8 pagesTransient Analysis and Modeling of Wind Generator During Power and Grid Voltage DropIAEME PublicationNo ratings yet
- Power Generation On Highway by Using Vertical Axis Wind TurbineDocument8 pagesPower Generation On Highway by Using Vertical Axis Wind TurbineDIWAKAR MRNo ratings yet
- Submitted by V.EzhilyaDocument12 pagesSubmitted by V.EzhilyaEzhilya VenkatNo ratings yet
- Power Quality Improvement For Grid Connected Wind Energy System Using FactsDocument70 pagesPower Quality Improvement For Grid Connected Wind Energy System Using FactsKaruna Reddy Yennapusa91% (11)
- ADocument72 pagesAMohit KothariNo ratings yet
- Application of Buck-Boost Converter For Wind Energy ControlDocument5 pagesApplication of Buck-Boost Converter For Wind Energy ControlIJIRST100% (2)
- Background: Disclosure Agreement (NDA) To Use The DynamicDocument8 pagesBackground: Disclosure Agreement (NDA) To Use The DynamicAkhilesh PanwarNo ratings yet
- InverterDocument52 pagesInverterD'ivy M Chico100% (3)
- Fixed-Speed and Variable-Slip Wind Turbines Providing Spinning Reserves To The GridDocument7 pagesFixed-Speed and Variable-Slip Wind Turbines Providing Spinning Reserves To The GridVivek AnandanNo ratings yet
- Soft-Stall Control Control For Small Power Regulation Furling D TurbineDocument12 pagesSoft-Stall Control Control For Small Power Regulation Furling D TurbineHitesh JoshiNo ratings yet
- Public Distribution System Using RFIDDocument4 pagesPublic Distribution System Using RFIDVimal RajanNo ratings yet
- A Power Electronic Conditioner Using Ultracapacitors To Improve Wind Turbine Power QualityDocument7 pagesA Power Electronic Conditioner Using Ultracapacitors To Improve Wind Turbine Power QualityDavid Cano AlfaroNo ratings yet
- Smart Transformer - SSTDocument6 pagesSmart Transformer - SSTDeepak GehlotNo ratings yet
- NIT Rourkela ThesisDocument66 pagesNIT Rourkela ThesisParimal SarafNo ratings yet
- Controller Design For DFIG Driven by Variable Speed Wind Turbine Using Static Output Feedback TechniqueDocument6 pagesController Design For DFIG Driven by Variable Speed Wind Turbine Using Static Output Feedback TechniqueAnandDuraiNo ratings yet
- Design, Fabrication and Implementation of A Modified 1kVA Sine Wave Solar Power InverterDocument6 pagesDesign, Fabrication and Implementation of A Modified 1kVA Sine Wave Solar Power Inverterpelu bodeNo ratings yet
- Wind Power Thesis PDFDocument8 pagesWind Power Thesis PDFClaire Webber100% (2)
- Grid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC Converter For Household Applications With Power Flow ManagementDocument4 pagesGrid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC Converter For Household Applications With Power Flow ManagementIJRASETPublicationsNo ratings yet
- Wind Turbine GeneratorDocument12 pagesWind Turbine GeneratorMaha SoeNo ratings yet
- Doubly-Fed Induction Generator Control For Variable-Speed Wind Power Generation SystemDocument5 pagesDoubly-Fed Induction Generator Control For Variable-Speed Wind Power Generation SystemB Vijay VihariNo ratings yet
- A Review - HVDC Application of SOLAR POWER and Its ControlDocument3 pagesA Review - HVDC Application of SOLAR POWER and Its ControlM Balaji Shrinivas 16BEE0326No ratings yet
- Photovoltaic Systems Interconnected Onto Secondary Network Distribution Systems - Success StoriesDocument42 pagesPhotovoltaic Systems Interconnected Onto Secondary Network Distribution Systems - Success StoriesJacques DeroualleNo ratings yet
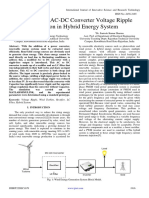
- Wind Energy AC-DC Converter Voltage Ripple Reduction in Hybrid Energy SystemDocument5 pagesWind Energy AC-DC Converter Voltage Ripple Reduction in Hybrid Energy SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- BBGDocument8 pagesBBGGrandeurNo ratings yet
- Z - Source Inverter For Grid Connected Dual Rotor Counter Rotation Permanent Magnet Synchronous GeneratorDocument13 pagesZ - Source Inverter For Grid Connected Dual Rotor Counter Rotation Permanent Magnet Synchronous GeneratorSivan RajNo ratings yet
- Thesis On Wind Power PlantDocument6 pagesThesis On Wind Power PlantPaperWritingServicesBestEvansville100% (2)
- Small Wind Turbine Testing and Applications DevelopmentDocument8 pagesSmall Wind Turbine Testing and Applications Developmentamro_mahdyNo ratings yet
- Wind Turbine Using Doubly Fed Induction Generator Systems For Wind TurbinesDocument3 pagesWind Turbine Using Doubly Fed Induction Generator Systems For Wind Turbinesanil kasotNo ratings yet
- Energy ManagementDocument55 pagesEnergy ManagementNjitnumNo ratings yet
- Design and Construction of A 2000W Inverter: Lawal Sodiq Olamilekan 03191100Document20 pagesDesign and Construction of A 2000W Inverter: Lawal Sodiq Olamilekan 03191100Da Saint100% (1)
- Power Electronics in Renewable Energy SystemsDocument17 pagesPower Electronics in Renewable Energy SystemsPaulius Bruneika100% (1)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Distributed Power Resources: Operation and Control of Connecting to the GridFrom EverandDistributed Power Resources: Operation and Control of Connecting to the GridNo ratings yet
- It Is Quite Another Electricity: Transmitting by One Wire and Without GroundingFrom EverandIt Is Quite Another Electricity: Transmitting by One Wire and Without GroundingNo ratings yet
- Principles of Shunt Capacitor Bank Application & Protection PDFDocument15 pagesPrinciples of Shunt Capacitor Bank Application & Protection PDFDallie KurniawanNo ratings yet
- Automatic Power Factor Control (Apfr) Capacitor ShuntDocument13 pagesAutomatic Power Factor Control (Apfr) Capacitor ShuntDallie KurniawanNo ratings yet
- Experimental Design of Capacitance Requi PDFDocument8 pagesExperimental Design of Capacitance Requi PDFDallie KurniawanNo ratings yet
- Magnetic Coupling Torque Vs Air GapDocument4 pagesMagnetic Coupling Torque Vs Air GapDallie KurniawanNo ratings yet
- ELC - Hydrocontrol Manual PDFDocument28 pagesELC - Hydrocontrol Manual PDFDallie KurniawanNo ratings yet
- Indonesia Automotive Industry Outlook 2020Document31 pagesIndonesia Automotive Industry Outlook 2020Dallie Kurniawan100% (1)
- The Analysis and Modelling of A Self-Excited Induction Generator Driven by A Variable Speed Wind TurbineDocument21 pagesThe Analysis and Modelling of A Self-Excited Induction Generator Driven by A Variable Speed Wind TurbineDallie KurniawanNo ratings yet
- Rotoverter C 9-5Document2 pagesRotoverter C 9-5pfalencarNo ratings yet
- 1997quispe Arias SEIGDocument3 pages1997quispe Arias SEIGDallie KurniawanNo ratings yet
- 7PG15 - TR: Answers For EnergyDocument4 pages7PG15 - TR: Answers For Energyahmedmaged88No ratings yet
- SEPIC Analysis Team 2 PDFDocument8 pagesSEPIC Analysis Team 2 PDFjunior mauricio lojaNo ratings yet
- Emft Assignment # 1Document1 pageEmft Assignment # 1Muhammad HassanNo ratings yet
- Worksheet (2) On Current ElectricityDocument7 pagesWorksheet (2) On Current ElectricitySrijit SahaNo ratings yet
- Yamaha YST-SW515Document20 pagesYamaha YST-SW515hdlsdfdsfNo ratings yet
- SRVS30U Service ManualDocument72 pagesSRVS30U Service ManualJimDavisNo ratings yet
- Supply Services Code (E)Document101 pagesSupply Services Code (E)kasundp88No ratings yet
- PartsManual Di750Document168 pagesPartsManual Di750Copy CenterNo ratings yet
- Manual Servico TV LCD Philips Chassis LC1.20e AaDocument26 pagesManual Servico TV LCD Philips Chassis LC1.20e AaErnandesTorresBarbosaNo ratings yet
- Coaxial Cables: Types of Computer Network CablesDocument9 pagesCoaxial Cables: Types of Computer Network CablesedrisNo ratings yet
- Earth Electrode and Loop Booklet V2Document40 pagesEarth Electrode and Loop Booklet V2wizaarz100% (1)
- Automatic Transmission and DifferentialDocument58 pagesAutomatic Transmission and Differentialvadim vadimNo ratings yet
- Electromagnetic Fields of High-Speed Transportation Systems: The International Maglev BoardDocument22 pagesElectromagnetic Fields of High-Speed Transportation Systems: The International Maglev BoardMayur PuriNo ratings yet
- NTC-PTC/ P R V-I I-V/ Pt100 TC: Double Stage Electronic ControllerDocument4 pagesNTC-PTC/ P R V-I I-V/ Pt100 TC: Double Stage Electronic ControllerJaime DiazNo ratings yet
- Saimo Instruction ManualDocument101 pagesSaimo Instruction ManualSandro SiagianNo ratings yet
- Air Bag BleizerDocument88 pagesAir Bag BleizerEnrique Felipe Reveco BahamondesNo ratings yet
- RKI GD 70D ManualDocument142 pagesRKI GD 70D ManualBobby RinaldiNo ratings yet
- TRIAC Docx-1Document8 pagesTRIAC Docx-1Mylene CapulongNo ratings yet
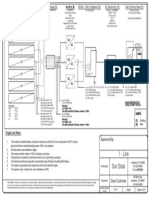
- Sample Solar Permit Plan - 1 Line Drawing PDFDocument1 pageSample Solar Permit Plan - 1 Line Drawing PDFSAEL SOLARNo ratings yet
- TDA8947J: 1. General DescriptionDocument24 pagesTDA8947J: 1. General DescriptionShauna WhelanNo ratings yet
- Altavoces JBL JRXDocument2 pagesAltavoces JBL JRXSteven RojasNo ratings yet
- UPF Example: UPF For The Above Power Intent: ######## Create Power Domains ###########Document4 pagesUPF Example: UPF For The Above Power Intent: ######## Create Power Domains ###########Mayur Agarwal50% (2)
- Troubleshooting Devicenet: Marco Bruno - Engineer, Remote Support - 04 - 23. 20Document70 pagesTroubleshooting Devicenet: Marco Bruno - Engineer, Remote Support - 04 - 23. 20Monica DiazNo ratings yet
- YIHUA 853D 1A 4 LED With USB New Type 3in1 Rework Station WithDocument3 pagesYIHUA 853D 1A 4 LED With USB New Type 3in1 Rework Station WithMarlon RuizNo ratings yet
- Isc 2SC5949: Silicon NPN Power TransistorDocument3 pagesIsc 2SC5949: Silicon NPN Power TransistorJuan RamírezNo ratings yet
- Volvo Diesel Generator p150v Tad720geDocument4 pagesVolvo Diesel Generator p150v Tad720geEvany Ziñho QNo ratings yet
- Lampiran - Datasheet IC V98xxDocument284 pagesLampiran - Datasheet IC V98xxshaga shaulagaraNo ratings yet
- Fluorometer Instruction ManualDocument35 pagesFluorometer Instruction Manualkconnolly14709No ratings yet
- Interupptor de Potencia 04Document13 pagesInterupptor de Potencia 04Manuel TravezanNo ratings yet