You might also like
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- Stability and Control: Outline of This ChapterDocument21 pagesStability and Control: Outline of This ChaptergarridolopezNo ratings yet
- Review of Aircraft AerodynamicsDocument13 pagesReview of Aircraft AerodynamicsIaNickNo ratings yet
- Model aeroplanes: The building of model monoplanes, biplanes, etc., together with a chapter on building a model airshipFrom EverandModel aeroplanes: The building of model monoplanes, biplanes, etc., together with a chapter on building a model airshipNo ratings yet
- Flight DynamicsDocument12 pagesFlight Dynamicsthomasvictor2005No ratings yet
- Simplified Flutter Prevention Criteria For Personal Type AircraftDocument27 pagesSimplified Flutter Prevention Criteria For Personal Type AircraftMark Evan SalutinNo ratings yet
- Unit-5 Elements of Aeroelasticity by G.Velmurugan AP/AeroDocument21 pagesUnit-5 Elements of Aeroelasticity by G.Velmurugan AP/AeroveluNo ratings yet
- Wing Design PDFDocument31 pagesWing Design PDFVijay GohilNo ratings yet
- Pitch StabilityDocument6 pagesPitch StabilityAirPlaneTrainMobileNo ratings yet
- Pitching MomentDocument3 pagesPitching MomentAEX3 111No ratings yet
- Aerodynamics IDocument48 pagesAerodynamics IDivya Krishnan100% (1)
- DESEMPENHODocument13 pagesDESEMPENHOAry guimaraes netoNo ratings yet
- Report On RC AeroplaneDocument23 pagesReport On RC AeroplaneSandeep Kr. Mishra70% (10)
- Airplane DesignDocument34 pagesAirplane DesignMarion Nori MarallagNo ratings yet
- Unit-Iv Notes Faculty Name: R.Jini Raj Class: B.E Aeronautical Subject Code: Ae8604 Semester: Vi Subject Name: Aircraft DesignDocument28 pagesUnit-Iv Notes Faculty Name: R.Jini Raj Class: B.E Aeronautical Subject Code: Ae8604 Semester: Vi Subject Name: Aircraft DesignTHE BOISNo ratings yet
- Aircraft Performance 2 Marks Nambi RajanDocument10 pagesAircraft Performance 2 Marks Nambi RajanNambi RajanNo ratings yet
- Conceptual Simulator Implementation of Flapping Wing Micro Air Vehicle Using FLAMESDocument18 pagesConceptual Simulator Implementation of Flapping Wing Micro Air Vehicle Using FLAMESKrishna MyakalaNo ratings yet
- 2018 1 X Y HamadaDocument28 pages2018 1 X Y HamadaGaurav Kumar ThakurNo ratings yet
- Antifragility and Aircraft DesignDocument19 pagesAntifragility and Aircraft Designjose luis garnica tinajeroNo ratings yet
- Article AEAT Vertical TailDocument21 pagesArticle AEAT Vertical TailscribdownloaderpassNo ratings yet
- Load and Trim Answer Bank-1Document83 pagesLoad and Trim Answer Bank-1Chandru V.kNo ratings yet
- Config Aero Hi Alpha NotesDocument17 pagesConfig Aero Hi Alpha NotesAbhishek SinhaNo ratings yet
- Variable Twist WingDocument12 pagesVariable Twist WingGurjyot SinghNo ratings yet
- Aerodynamic Flutter BannerDocument11 pagesAerodynamic Flutter BannerRavi TejaNo ratings yet
- Laboratory Session IV: Glider Design and Performance: Universidad Carlos III de MadridDocument6 pagesLaboratory Session IV: Glider Design and Performance: Universidad Carlos III de MadridSwami CharanNo ratings yet
- Effect of Winglets On Induced Drag of Ideal Wing ShapesDocument30 pagesEffect of Winglets On Induced Drag of Ideal Wing Shapestimmyjim333100% (1)
- How To Design Your Own R/C Aircraft Guide: Part 2 (Designing The Tail)Document17 pagesHow To Design Your Own R/C Aircraft Guide: Part 2 (Designing The Tail)danylomalyuta88% (8)
- Pack-A-Plane: Designing A Compact RC Aircraft For Rapid DeploymentDocument16 pagesPack-A-Plane: Designing A Compact RC Aircraft For Rapid DeploymentBartłomiej BurlagaNo ratings yet
- Module IVDocument25 pagesModule IVVinay KashyapNo ratings yet
- 19AEE301 CA3 4 QP 2023Document3 pages19AEE301 CA3 4 QP 2023gnsvaravishwas03No ratings yet
- Assignment: ASC311A Aircraft Stability and Control B.Tech in ASE Aerospace Engineering FETDocument15 pagesAssignment: ASC311A Aircraft Stability and Control B.Tech in ASE Aerospace Engineering FETNarahari HunsurNo ratings yet
- Winglet Multi-Objective Shape OptimizationDocument17 pagesWinglet Multi-Objective Shape OptimizationDerekNo ratings yet
- +++++++ESTIMATING RC MODEL AERODYNAMICS AND PERFORMANCE-RC Airplane DesignDocument13 pages+++++++ESTIMATING RC MODEL AERODYNAMICS AND PERFORMANCE-RC Airplane Designumunera2997No ratings yet
- Reference Note - Topic 4 Airfoil Terminologies (r1)Document15 pagesReference Note - Topic 4 Airfoil Terminologies (r1)Arief SambestNo ratings yet
- Aircraft 1Document13 pagesAircraft 1J.a. RumiNo ratings yet
- Flight Without FormulaeDocument228 pagesFlight Without Formulaebillnye1250100% (1)
- Practical Lab # 6. Measurement of Drag and Lift of An Aerofoil at Different Angles of AttackDocument7 pagesPractical Lab # 6. Measurement of Drag and Lift of An Aerofoil at Different Angles of Attackamanuelfitsum589No ratings yet
- Basic Aeronautical Knowledge: Notes To Support GENS 5001Document13 pagesBasic Aeronautical Knowledge: Notes To Support GENS 5001vladimirgabrielNo ratings yet
- Interim Report ZainDocument20 pagesInterim Report ZainHannah ShaikhNo ratings yet
- Aircraft PerformanceDocument29 pagesAircraft PerformanceRajiv Vutukuri100% (1)
- Aerodynamcis Final Design Report Chapter Draft 1 Team 2Document18 pagesAerodynamcis Final Design Report Chapter Draft 1 Team 2ramez01No ratings yet
- AirfoilDocument21 pagesAirfoilandrw19870% (1)
- Lecture Note 4Document49 pagesLecture Note 4Tolga Burak UysalNo ratings yet
- Explaining The Lift EquationDocument5 pagesExplaining The Lift EquationAbhinav singhNo ratings yet
- What Makes Airplanes Fly Notes On The Whole AirplaneDocument16 pagesWhat Makes Airplanes Fly Notes On The Whole AirplaneasdfagNo ratings yet
- Aircraft 2600 WordsDocument24 pagesAircraft 2600 WordsMashal KhanNo ratings yet
- Laws of MotionDocument44 pagesLaws of MotionYuveraju RajuNo ratings yet
- Theory of FlightDocument15 pagesTheory of FlightVergel PabustanNo ratings yet
- A Dynamic Stability Rocket SimulatorDocument16 pagesA Dynamic Stability Rocket SimulatorĐăng Khôi TrầnNo ratings yet
- Paper On TwistDocument10 pagesPaper On TwistPriyanka RajputNo ratings yet
- AircraftDesign 9 EmpennageGeneralDesignDocument16 pagesAircraftDesign 9 EmpennageGeneralDesignBart Siwiec ZygmuntNo ratings yet
- Introduction To Wing DesignDocument9 pagesIntroduction To Wing DesignJef LeNo ratings yet
- AirfoilDocument8 pagesAirfoilMOFEEZALAMNo ratings yet
- Airfoil WingsDocument18 pagesAirfoil WingsKhandoker Raisul AzadNo ratings yet
- (Class 19) Introduction To Aeronautical EngineeringDocument48 pages(Class 19) Introduction To Aeronautical EngineeringFabian Torres100% (2)
- Chapter 7-StabilityControl QDocument3 pagesChapter 7-StabilityControl Qsh1999No ratings yet
- Lift Coefficient - WikipediaDocument13 pagesLift Coefficient - WikipediaRohit RajNo ratings yet
- The Effect of Variable WingspanDocument26 pagesThe Effect of Variable WingspanUriel CasiqueNo ratings yet
- ESP (Electrical Submersible Pump) : AdvantagesDocument1 pageESP (Electrical Submersible Pump) : AdvantagesRedhawk15No ratings yet
- Compre Hydraulics PSDocument5 pagesCompre Hydraulics PSAlvin Lualhati0% (1)
- Btech Ce 3 Sem Fluid Mechanics Kce303 2022Document2 pagesBtech Ce 3 Sem Fluid Mechanics Kce303 2022shivchauhan0507No ratings yet
- Sheet 6: Compressible Flow in Nozzles: Stagnation PropertiesDocument3 pagesSheet 6: Compressible Flow in Nozzles: Stagnation PropertiesAbdelaziz TamimNo ratings yet
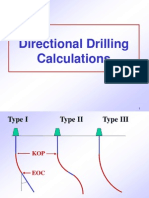
- Calculation Equations For Directional DrillingDocument79 pagesCalculation Equations For Directional Drillingmagdy199188% (8)
- Freefall WorksheetDocument3 pagesFreefall WorksheetterrencendabambiNo ratings yet
- TEMA Flow Induced VibrationDocument1 pageTEMA Flow Induced VibrationHimanshu SharmaNo ratings yet
- Dust Collector DesignDocument3 pagesDust Collector DesignpavanNo ratings yet
- Jet Pump ThesisDocument6 pagesJet Pump ThesisCrystal Sanchez100% (1)
- Code NozzleDocument8 pagesCode NozzleBijyendra KumarNo ratings yet
- 4 Full Report F3Document15 pages4 Full Report F3NH SyzlnNo ratings yet
- 9702-1J02 S21725Document28 pages9702-1J02 S21725mkpsrtmNo ratings yet
- Unsteady Aerodynamics Flutter AnalysisDocument17 pagesUnsteady Aerodynamics Flutter AnalysisAravindNo ratings yet
- Lodos ActivadosDocument32 pagesLodos Activadosjvan migvelNo ratings yet
- Department of Chemical Engineering School of Engineering and Architecture Saint Louis University Laboratory Report Evaluation SheetDocument20 pagesDepartment of Chemical Engineering School of Engineering and Architecture Saint Louis University Laboratory Report Evaluation SheetSarah Sanchez100% (1)
- Newton's Law of Motion-2Document4 pagesNewton's Law of Motion-2shiva ram prasad pulagamNo ratings yet
- Jacket Launching AnalysisDocument7 pagesJacket Launching Analysisiw2fualNo ratings yet
- Energies: Bio-Inspired Rotor Design Characterization of A Horizontal Axis Wind TurbineDocument22 pagesEnergies: Bio-Inspired Rotor Design Characterization of A Horizontal Axis Wind TurbineFransisco JeremyNo ratings yet
- 1st Puc Physics Chapter8-Gravitation Notes by U N SwamyDocument11 pages1st Puc Physics Chapter8-Gravitation Notes by U N Swamyashwinikumari bNo ratings yet
- Venturi ReportDocument8 pagesVenturi Reportstephen kangereNo ratings yet
- Heat Transfer Chapter 6 SummaryDocument8 pagesHeat Transfer Chapter 6 SummaryJeremiah ValeraNo ratings yet
- SCIENCE DAY 10 (JAN 23 2021) With Answer KeyDocument7 pagesSCIENCE DAY 10 (JAN 23 2021) With Answer Keynailia eliasNo ratings yet
- Numerical Simulation of Vortex Shedding From An inDocument12 pagesNumerical Simulation of Vortex Shedding From An inShyla_SinhaNo ratings yet
- ANSYS Fluid Analysis GuideDocument217 pagesANSYS Fluid Analysis GuidesarvannnNo ratings yet
- Design of A Biplane Wing For Small-Scale Aircraft: The Pennsylvania State University, University Park, PA, 16802Document10 pagesDesign of A Biplane Wing For Small-Scale Aircraft: The Pennsylvania State University, University Park, PA, 16802Anonymous qTKCWlxNo ratings yet
- F1 Flow Measurement in Closed ConduitDocument5 pagesF1 Flow Measurement in Closed ConduitSzeQiLungNo ratings yet
- Mechanics of Flight Project 2Document9 pagesMechanics of Flight Project 2wqgsmjc301No ratings yet
- Aiaa 1996 3392Document17 pagesAiaa 1996 3392Alexandre MedinaNo ratings yet
- Physics equations sheet: W=mg W=Fs F=ke s=vt a = Δ v t F=ma p=mv Ek = 1 m v 2 Ep=mgh P = E T P = W tDocument2 pagesPhysics equations sheet: W=mg W=Fs F=ke s=vt a = Δ v t F=ma p=mv Ek = 1 m v 2 Ep=mgh P = E T P = W tUtkarsh IngleNo ratings yet
- You Can't Joke About That: Why Everything Is Funny, Nothing Is Sacred, and We're All in This TogetherFrom EverandYou Can't Joke About That: Why Everything Is Funny, Nothing Is Sacred, and We're All in This TogetherNo ratings yet
- The House at Pooh Corner - Winnie-the-Pooh Book #4 - UnabridgedFrom EverandThe House at Pooh Corner - Winnie-the-Pooh Book #4 - UnabridgedRating: 4.5 out of 5 stars4.5/5 (5)
- The Importance of Being Earnest: Classic Tales EditionFrom EverandThe Importance of Being Earnest: Classic Tales EditionRating: 4.5 out of 5 stars4.5/5 (44)
- The Inimitable Jeeves [Classic Tales Edition]From EverandThe Inimitable Jeeves [Classic Tales Edition]Rating: 5 out of 5 stars5/5 (3)
- The Comedians in Cars Getting Coffee BookFrom EverandThe Comedians in Cars Getting Coffee BookRating: 4.5 out of 5 stars4.5/5 (8)
- The Book of Bad:: Stuff You Should Know Unless You’re a PussyFrom EverandThe Book of Bad:: Stuff You Should Know Unless You’re a PussyRating: 3.5 out of 5 stars3.5/5 (3)
- Sex, Drugs, and Cocoa Puffs: A Low Culture ManifestoFrom EverandSex, Drugs, and Cocoa Puffs: A Low Culture ManifestoRating: 3.5 out of 5 stars3.5/5 (1428)
- The Most Forbidden Knowledge: 151 Things NO ONE Should Know How to DoFrom EverandThe Most Forbidden Knowledge: 151 Things NO ONE Should Know How to DoRating: 4.5 out of 5 stars4.5/5 (6)
- Take My Advice: Letters to the Next Generation from People Who Know a Thing or TwoFrom EverandTake My Advice: Letters to the Next Generation from People Who Know a Thing or TwoJames L. HarmonRating: 4 out of 5 stars4/5 (5)
- Welcome to the United States of Anxiety: Observations from a Reforming NeuroticFrom EverandWelcome to the United States of Anxiety: Observations from a Reforming NeuroticRating: 3.5 out of 5 stars3.5/5 (10)
- The Smartest Book in the World: A Lexicon of Literacy, A Rancorous Reportage, A Concise Curriculum of CoolFrom EverandThe Smartest Book in the World: A Lexicon of Literacy, A Rancorous Reportage, A Concise Curriculum of CoolRating: 4 out of 5 stars4/5 (14)