You might also like
- Liber AzerateDocument219 pagesLiber AzerateCarl WheelerNo ratings yet
- Happy New Year - New Beginnings EmpowermentDocument6 pagesHappy New Year - New Beginnings EmpowermentSubhadip chakraborty100% (1)
- TH3 - Eng'g MechanicsDocument8 pagesTH3 - Eng'g MechanicsJan Jan AnoNo ratings yet
- ROBOTICSDocument107 pagesROBOTICSReynald John PastranaNo ratings yet
- TLE 10 Lesson 1Document111 pagesTLE 10 Lesson 1Lindsay Kirstyn Tabaniag100% (1)
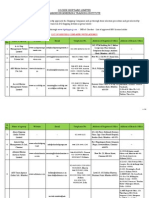
- Shipping Companies NewDocument30 pagesShipping Companies NewAks Gupta57% (7)
- 01 Introduction To RoboticsDocument31 pages01 Introduction To RoboticsoshadhaNo ratings yet
- Bots! Robotics Engineering: with Hands-On Makerspace ActivitiesFrom EverandBots! Robotics Engineering: with Hands-On Makerspace ActivitiesRating: 5 out of 5 stars5/5 (2)
- ROBOTICS Lesson 1 IntroductionDocument58 pagesROBOTICS Lesson 1 IntroductionNikky MariNo ratings yet
- The Role of Electronics in Robotics: S.Chitra & S.NishaDocument43 pagesThe Role of Electronics in Robotics: S.Chitra & S.Nishaharishan_sciNo ratings yet
- An Introduction to the Wonderful World of Robotics - Science Book for Kids | Children's Science Education BooksFrom EverandAn Introduction to the Wonderful World of Robotics - Science Book for Kids | Children's Science Education BooksNo ratings yet
- Artificial Intelligence: Chapter# 05 RoboticsDocument37 pagesArtificial Intelligence: Chapter# 05 Roboticszabih niazaiNo ratings yet
- Loi Diesel EN590 10ppm Corinth 14-7-65 EditDocument6 pagesLoi Diesel EN590 10ppm Corinth 14-7-65 EditRatchanon Ontim100% (3)
- Seminar On: RoboticsDocument25 pagesSeminar On: RoboticsvivekNo ratings yet
- CSE Robotics PPT - YMKDocument23 pagesCSE Robotics PPT - YMKtarun tejaNo ratings yet
- Mechanical Engineering Computer Integrated Manufacturing Systems Robotics NotesDocument29 pagesMechanical Engineering Computer Integrated Manufacturing Systems Robotics NotesJoyNo ratings yet
- RoboticsDocument15 pagesRoboticsMilan Pitroda0% (1)
- CSE RoboticsDocument25 pagesCSE RoboticsAsan Baker K RNo ratings yet
- Fundamentals of Robotics 16Me6Derob: Unit - 1 Chapter - 1: IntroductionDocument15 pagesFundamentals of Robotics 16Me6Derob: Unit - 1 Chapter - 1: IntroductionAll_regNo ratings yet
- Submitted To:: Mr. Akash Ch. Srivastava Mr. Ashutosh SinghDocument26 pagesSubmitted To:: Mr. Akash Ch. Srivastava Mr. Ashutosh SinghSam SachanNo ratings yet
- ASIMO, A Humanoid Robot Manufactured by Honda Robot Is ADocument23 pagesASIMO, A Humanoid Robot Manufactured by Honda Robot Is AANUJNo ratings yet
- ROBOTICSDocument28 pagesROBOTICSOsama Azeem0% (1)
- Robotics 1 - Coordinate SystemDocument102 pagesRobotics 1 - Coordinate System15.Rushikesh IrabattinNo ratings yet
- Introduction To Robotics PDFDocument22 pagesIntroduction To Robotics PDFsamurai7_77No ratings yet
- Unit 8: Robotics: The Origins of RobotsDocument29 pagesUnit 8: Robotics: The Origins of RobotsvinayaNo ratings yet
- Unit1 - Basic ConceptsDocument73 pagesUnit1 - Basic ConceptsSharmila83No ratings yet
- ROLLNO/REGD NO: A13/10900739 SECTION: H1901 Submitted To: Harjit SirDocument7 pagesROLLNO/REGD NO: A13/10900739 SECTION: H1901 Submitted To: Harjit SirrahulcoolhutNo ratings yet
- RoboticsDocument19 pagesRoboticsSaraah GhoriNo ratings yet
- 1 - Introduction To RoboticsDocument64 pages1 - Introduction To RoboticsDibyanshuPandey100% (1)
- TBW PresentationDocument13 pagesTBW Presentationسیدہ ماریہNo ratings yet
- RoboticsDocument27 pagesRoboticsUsama SpiffyNo ratings yet
- Prestige Institute of Engineering and Science: RoboticsDocument29 pagesPrestige Institute of Engineering and Science: Roboticsvvek10No ratings yet
- Seminar Presentation: RoboticsDocument22 pagesSeminar Presentation: RoboticsPramodPradhanNo ratings yet
- Introduction To RoboticsDocument63 pagesIntroduction To RoboticsHunterWigintonNo ratings yet
- Introduction To Robotics: 1.1.what Is A Robot?Document21 pagesIntroduction To Robotics: 1.1.what Is A Robot?Dinesh KumarNo ratings yet
- A Robot Is A Virtual or Mechanical Artificial AgentDocument13 pagesA Robot Is A Virtual or Mechanical Artificial Agentmelvin tolson100% (3)
- Me0506 Robotics Engg: Classification and Types of RobotDocument65 pagesMe0506 Robotics Engg: Classification and Types of RobotSiva ShankarNo ratings yet
- Ntroduction TO Obot AND OboticsDocument12 pagesNtroduction TO Obot AND OboticsHassan allaNo ratings yet
- Chapter 1Document50 pagesChapter 1Genet GezehagnNo ratings yet
- Robotics: Submitted byDocument9 pagesRobotics: Submitted bytkultheNo ratings yet
- Structure of RobotDocument20 pagesStructure of RobotdharanikaNo ratings yet
- Fundamentals of Robotics: Ingeniería en ComputaciónDocument37 pagesFundamentals of Robotics: Ingeniería en Computaciónasnake dessieNo ratings yet
- PPTDocument27 pagesPPTZaheer Ahamed100% (1)
- Rohini 63738728871Document10 pagesRohini 63738728871Leonard MwijageNo ratings yet
- 2.history of RoboticsDocument12 pages2.history of RoboticsSai RamNo ratings yet
- Unit I Fundamentals of Robot: Prepared by B.Balasubramanian Ap/Mech CcetDocument40 pagesUnit I Fundamentals of Robot: Prepared by B.Balasubramanian Ap/Mech CcetBala mechNo ratings yet
- Robotics: EtymologyDocument20 pagesRobotics: EtymologygloriafindelinNo ratings yet
- RoboticsDocument39 pagesRoboticsEysi WideNo ratings yet
- Industrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeDocument73 pagesIndustrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeSiddharth Gupta0% (1)
- Lesson 1Document5 pagesLesson 1Angela Rose AguilaNo ratings yet
- 3arm Robot Mini FinalDocument49 pages3arm Robot Mini FinalWebsoft Tech-HydNo ratings yet
- CREATIVE TECHNOLOGIES NotesDocument6 pagesCREATIVE TECHNOLOGIES NotessilverNo ratings yet
- Robotics Unit1 SlidesDocument65 pagesRobotics Unit1 SlidesJanarthanan BalakrishnasamyNo ratings yet
- 1 Introduction To Robotics DevelopmentDocument52 pages1 Introduction To Robotics Developmentiveynesh5No ratings yet
- To Invent You Need A Good Imagination and A Pile of JunkDocument16 pagesTo Invent You Need A Good Imagination and A Pile of Junkpchhina100% (16)
- Introduction To RoboticsDocument19 pagesIntroduction To RoboticsOngNo ratings yet
- Robotics IntroDocument19 pagesRobotics IntrowazirkqasemNo ratings yet
- Unit 8: Robotics: The Origins of RobotsDocument29 pagesUnit 8: Robotics: The Origins of RobotsshivaNo ratings yet
- Me445 Robotics 2Document143 pagesMe445 Robotics 2زهديابوانسNo ratings yet
- Chpter 1Document13 pagesChpter 1yusuf yuyuNo ratings yet
- Introduction To RoboticsDocument17 pagesIntroduction To Roboticse_readerNo ratings yet
- Robotics 1Document14 pagesRobotics 1Riz WanNo ratings yet
- Short History of RoboticsDocument68 pagesShort History of Roboticstagore05No ratings yet
- Unit - 1 - History, Robotic Configurations, Criteria For Defining A Robot and Robot CategoriesDocument16 pagesUnit - 1 - History, Robotic Configurations, Criteria For Defining A Robot and Robot CategoriesNihar MehtaNo ratings yet
- Index CH 1 7 FinalDocument3 pagesIndex CH 1 7 FinalDanish PervezNo ratings yet
- StudentHandbook2014 PDFDocument31 pagesStudentHandbook2014 PDFDanish PervezNo ratings yet
- SSB DetailDocument27 pagesSSB Detailsandeepsingh_1108No ratings yet
- Zahid CVDocument2 pagesZahid CVDanish PervezNo ratings yet
- Advt ST 2017Document2 pagesAdvt ST 2017Anonymous dfUnHLNo ratings yet
- AndroidDocument7 pagesAndroidKushalRoCxzNo ratings yet
- Curriculum Vitaé: Zahid Rasul KhanDocument2 pagesCurriculum Vitaé: Zahid Rasul KhanDanish PervezNo ratings yet
- Certificate OBCDocument1 pageCertificate OBCManini JaiswalNo ratings yet
- Detailed Notification A A I Je at C 2016Document12 pagesDetailed Notification A A I Je at C 2016Gunalan PanneerNo ratings yet
- Detailed AdvtDocument36 pagesDetailed AdvtSujandeep ThapaNo ratings yet
- Process Capability Lecture - Teleconference 3Document6 pagesProcess Capability Lecture - Teleconference 3Danish PervezNo ratings yet
- Airlines Reservation Sytemterm Paper of CseDocument17 pagesAirlines Reservation Sytemterm Paper of CseNeha ModiNo ratings yet
- 2021 - Meng Et Al. - Geothermics - Geothermal Resource Potential Assessment Utilizing GIS - Based Multi Criteria Decision Analysis MethoDocument11 pages2021 - Meng Et Al. - Geothermics - Geothermal Resource Potential Assessment Utilizing GIS - Based Multi Criteria Decision Analysis MethoJhon Camilo Matiz LeonNo ratings yet
- Order Information: Common Rail SystemDocument2 pagesOrder Information: Common Rail SystemSuriya ShankarNo ratings yet
- ENERGETICS EbookDocument96 pagesENERGETICS Ebooklianchen251110No ratings yet
- American International University-Bangladesh: Department of Electrical and Electronic EngineeringDocument6 pagesAmerican International University-Bangladesh: Department of Electrical and Electronic EngineeringFBH pegionNo ratings yet
- The Great Pyramid of Giza Research PaperDocument6 pagesThe Great Pyramid of Giza Research Paperkikufevoboj2100% (1)
- Saudi Green Initiative - Vision 2030Document5 pagesSaudi Green Initiative - Vision 2030Luk StrykeNo ratings yet
- Flash Arrestors RegulatorDocument2 pagesFlash Arrestors RegulatorcarlosNo ratings yet
- 3HP Motor SpecificationDocument12 pages3HP Motor SpecificationShadNo ratings yet
- AR RMW2.2G24 EZ SX Pump DatasheetDocument1 pageAR RMW2.2G24 EZ SX Pump DatasheetNitro anguianoNo ratings yet
- T SC 2549959 ks3 Electricity and Magnetism Knowledge Organiser - Ver - 7Document2 pagesT SC 2549959 ks3 Electricity and Magnetism Knowledge Organiser - Ver - 7Margarida SeromenhoNo ratings yet
- 8961A020WDocument2 pages8961A020WLTurboNo ratings yet
- Vitomax HS Technical DataDocument26 pagesVitomax HS Technical DataamirokhovatNo ratings yet
- Arrhenius PlotDocument4 pagesArrhenius PlotUsama IbrahimNo ratings yet
- Rigorous MethodDocument4 pagesRigorous MethodNRCM EEENo ratings yet
- Transformers (Questions)Document10 pagesTransformers (Questions)Jose Rowil IbarretaNo ratings yet
- Sameh Galal Mahmoud El Sayad 42 Years Old 17 Banha City, Qalioubia, EgyptDocument3 pagesSameh Galal Mahmoud El Sayad 42 Years Old 17 Banha City, Qalioubia, EgyptSameh GalalNo ratings yet
- Thermal Expansion - PDF - 90586Document41 pagesThermal Expansion - PDF - 90586M. N100% (1)
- Aventura Corporate BrochureDocument52 pagesAventura Corporate Brochurejugal ranaNo ratings yet
- Ascaso Steel Uno Professional (Boiler Version) Parts DiagramDocument23 pagesAscaso Steel Uno Professional (Boiler Version) Parts DiagramRedouane RchoukNo ratings yet
- Fimer Stringsizer - Configuration Report: Location Temperature (°C) Amb Cell Mounting MethodDocument1 pageFimer Stringsizer - Configuration Report: Location Temperature (°C) Amb Cell Mounting MethodIvan BychekNo ratings yet
- Casas-Ledón Et Al. 2019Document10 pagesCasas-Ledón Et Al. 2019Diego MuñozNo ratings yet
- ME 265 Lecture Slides 3 (First Law of Thermodynamics-Open Systems)Document17 pagesME 265 Lecture Slides 3 (First Law of Thermodynamics-Open Systems)Leslie Owusu MensahNo ratings yet
- LEO XST DatasheetDocument3 pagesLEO XST DatasheetELBAGHATI MohammadNo ratings yet
- Fundamentals of PhysicsDocument49 pagesFundamentals of PhysicsEkwama EwugaNo ratings yet
- Wall Mounted Gas Boiler - AristonDocument13 pagesWall Mounted Gas Boiler - Aristononga yaaNo ratings yet
- Most Essential Learning Competency: S8FE-Ig-29: Differentiate Heat and Temperature at The Molecular LevelDocument3 pagesMost Essential Learning Competency: S8FE-Ig-29: Differentiate Heat and Temperature at The Molecular LevelLenie MateoNo ratings yet