You might also like
- Sidecutters Manufactured by HensleyDocument8 pagesSidecutters Manufactured by Hensleyfernandoj100% (1)
- Basic Quantum MechanicsDocument216 pagesBasic Quantum Mechanicswww.vyeko_.bloger.hr100% (1)
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- SolidWorks Motion Study TutorialDocument37 pagesSolidWorks Motion Study TutorialVega R JoseNo ratings yet
- Mechanical Vibrations Week 1Document57 pagesMechanical Vibrations Week 1mrb87No ratings yet
- AH15849b PC Hydraulic Cylinders With Metal Guard Rings at The PistonDocument12 pagesAH15849b PC Hydraulic Cylinders With Metal Guard Rings at The PistonfernandojNo ratings yet
- Solutions Manual Advanced Engineering Mathematics 10th Edition by Erwin KreyszigDocument25 pagesSolutions Manual Advanced Engineering Mathematics 10th Edition by Erwin KreyszigTitispajarningsih22% (23)
- RecurDyn 版本6高级训练手册Document47 pagesRecurDyn 版本6高级训练手册Jou0411100% (1)
- Seismic Design of Precast Prestressed Concrete Structures - PampaninDocument14 pagesSeismic Design of Precast Prestressed Concrete Structures - PampaninLuis Pablo Ramirez ZavalaNo ratings yet
- STDCE TH Editting 01Document43 pagesSTDCE TH Editting 01lavyNo ratings yet
- CATIA V5-6R2015 Basics Part III: Assembly Design, Drafting, Sheetmetal Design, and Surface DesignFrom EverandCATIA V5-6R2015 Basics Part III: Assembly Design, Drafting, Sheetmetal Design, and Surface DesignRating: 5 out of 5 stars5/5 (2)
- Staad ProDocument24 pagesStaad Proammigalla swethaNo ratings yet
- Lifting Eyes For Excavator BucketsDocument1 pageLifting Eyes For Excavator BucketsfernandojNo ratings yet
- Robotics Practical FileDocument131 pagesRobotics Practical FileRAMAKANT RANANo ratings yet
- Abaqus Simulating Thermal Expansion PDFDocument20 pagesAbaqus Simulating Thermal Expansion PDFhasib75% (4)
- Transmission Loss in Piping From FisherDocument8 pagesTransmission Loss in Piping From FisheraruatscribdNo ratings yet
- Strand 7 TutorialDocument25 pagesStrand 7 TutorialmohanumaNo ratings yet
- BoxRipper Systems For ExcavatorsDocument2 pagesBoxRipper Systems For ExcavatorsfernandojNo ratings yet
- Analysis of Trusses Using SAP2000Document20 pagesAnalysis of Trusses Using SAP2000ran71681No ratings yet
- Working Model Tutorial: 1. InstallationDocument10 pagesWorking Model Tutorial: 1. Installationkhan shahrukhNo ratings yet
- Autodesk Inventor - It's All in The PresentationDocument10 pagesAutodesk Inventor - It's All in The PresentationNdianabasi UdonkangNo ratings yet
- Cómo Usar Working ModelDocument12 pagesCómo Usar Working ModelJorgeLuNo ratings yet
- Assignment 5, Group 2, Fatigue Life Estimation of Component For Reversed or Fluctuating LoadsDocument8 pagesAssignment 5, Group 2, Fatigue Life Estimation of Component For Reversed or Fluctuating Loads3344 Shubham ChouguleNo ratings yet
- Assemble This! (Part 1) : About The SpeakerDocument60 pagesAssemble This! (Part 1) : About The Speakerilie_alexNo ratings yet
- Computer Application in Civil EngineeringDocument21 pagesComputer Application in Civil EngineeringSangeetha AnguchamyNo ratings yet
- Autodesk® Inventor® Dynamic Simulation: Its Bark Is Worse Than Its Bite!Document24 pagesAutodesk® Inventor® Dynamic Simulation: Its Bark Is Worse Than Its Bite!Alcides Luis Fabián BráñezNo ratings yet
- 4bar Veloc Wiper CMDocument22 pages4bar Veloc Wiper CMManik SinghNo ratings yet
- Tutorial Tzu-Yu WuDocument12 pagesTutorial Tzu-Yu WuIonut-Catalin DimacheNo ratings yet
- It's All in The PresentationDocument14 pagesIt's All in The PresentationkaoblekstenaNo ratings yet
- Bulding Models in AdamsDocument18 pagesBulding Models in AdamsAttila BartiNo ratings yet
- Tut3 Web OpeningDocument29 pagesTut3 Web OpeningDario Manrique GamarraNo ratings yet
- Tutorial For Risa Educational: C.M. Uang and K.M. LeetDocument18 pagesTutorial For Risa Educational: C.M. Uang and K.M. LeetfabianoramiroNo ratings yet
- 1993 Virtual MechanicsDocument29 pages1993 Virtual MechanicsChevalier De BalibariNo ratings yet
- Interactive Physics ManualDocument13 pagesInteractive Physics ManualMarciano SantamaríaNo ratings yet
- ISSD User-Guide PDFDocument4 pagesISSD User-Guide PDFRavindu JayalathNo ratings yet
- Lab ManualDocument161 pagesLab ManualIam engineerNo ratings yet
- Motion Tutorial 2007Document30 pagesMotion Tutorial 2007Zoli0984No ratings yet
- Working Model 2d TutorialDocument4 pagesWorking Model 2d TutorialIvan Figueroa CruzNo ratings yet
- An Introduction To Engineering Design With Solidworks Teacher Guide Lesson4Document17 pagesAn Introduction To Engineering Design With Solidworks Teacher Guide Lesson4Eas DanistianNo ratings yet
- Tutorial No1Document4 pagesTutorial No1Lucas MachadoNo ratings yet
- In ME2: Packet 1Document16 pagesIn ME2: Packet 1John ValenzonaNo ratings yet
- World Machine 2 User GuideDocument83 pagesWorld Machine 2 User GuidejcescuNo ratings yet
- RISA-2D Educational TutorialDocument18 pagesRISA-2D Educational TutorialAlfredo FranquezNo ratings yet
- ECCE221 - Lab0 - Installation and Introduction To MULTISIMDocument20 pagesECCE221 - Lab0 - Installation and Introduction To MULTISIMsultanNo ratings yet
- Tehnical University Gheorghe Asachi From Iasi Faculty of Civil Engineering Master IseDocument26 pagesTehnical University Gheorghe Asachi From Iasi Faculty of Civil Engineering Master IseIon IovitaNo ratings yet
- Lab 1Document8 pagesLab 1hero_spaceboy3600No ratings yet
- SimXpert R3.2 Example ProblemsDocument230 pagesSimXpert R3.2 Example Problemspaulkastle100% (1)
- Introduction To Solid Modeling Using Solidworks 2006: Cosmosmotion TutorialDocument30 pagesIntroduction To Solid Modeling Using Solidworks 2006: Cosmosmotion TutorialPhan Dinh SyNo ratings yet
- Engineering Graphics & Drawing: Lab Manual # 3 (Introduction To Autocad)Document5 pagesEngineering Graphics & Drawing: Lab Manual # 3 (Introduction To Autocad)Noor SultanNo ratings yet
- Using MastanDocument64 pagesUsing MastanhellooneoneNo ratings yet
- Tutorial 11 Animation 3 - 2122Document23 pagesTutorial 11 Animation 3 - 2122吳先生No ratings yet
- Joints: in This Exercise, We'll Use The Joints Tool To Align A Component To Others in An Assembly. TheseDocument4 pagesJoints: in This Exercise, We'll Use The Joints Tool To Align A Component To Others in An Assembly. TheseCarlos OrtegaNo ratings yet
- Introductory Tutorial: Solidworks Motion and Finite Element Analysis (Fea) SimulationDocument12 pagesIntroductory Tutorial: Solidworks Motion and Finite Element Analysis (Fea) SimulationMWFirmansyahNo ratings yet
- Hawk Ridge 25 Solidworks Tips and Tricks Reference GuideDocument27 pagesHawk Ridge 25 Solidworks Tips and Tricks Reference Guidedavid SernaNo ratings yet
- Slope Stability Under Seismic Loading: Project SettingsDocument9 pagesSlope Stability Under Seismic Loading: Project SettingsMuhammad AfrasiyabNo ratings yet
- Software For Chemistry StudentsDocument16 pagesSoftware For Chemistry Studentscoding727treeNo ratings yet
- Introduction To CATIA V5: Jntuh College of Enginering ManthaniDocument43 pagesIntroduction To CATIA V5: Jntuh College of Enginering ManthaniarunNo ratings yet
- EE364 Maxwell Simulation Assignment 1Document37 pagesEE364 Maxwell Simulation Assignment 1jalilemadiNo ratings yet
- Lab 2Document16 pagesLab 2zakwan ahmadNo ratings yet
- Manual LSPSDocument101 pagesManual LSPSEnrique León SalvaNo ratings yet
- TaraNG UserManual GECA-1Document42 pagesTaraNG UserManual GECA-1Durgesh DhoreNo ratings yet
- Dynamic SimulationDocument3 pagesDynamic Simulationcancer24No ratings yet
- SolidWorks Motion AnalysisDocument37 pagesSolidWorks Motion AnalysisAnonymous rI9NBeE5No ratings yet
- NX 9 for Beginners - Part 3 (Additional Features and Multibody Parts, Modifying Parts)From EverandNX 9 for Beginners - Part 3 (Additional Features and Multibody Parts, Modifying Parts)No ratings yet
- 930e4 Cerrejon Retarding Grid Assembly 1 3 58F-06-01590 PDFDocument2 pages930e4 Cerrejon Retarding Grid Assembly 1 3 58F-06-01590 PDFfernandojNo ratings yet
- 930e4 Cerrejon Retarding Grid Assembly 1 3 58f-06-01590Document2 pages930e4 Cerrejon Retarding Grid Assembly 1 3 58f-06-01590fernandojNo ratings yet
- 930e4 Cerrejon LH Steps & PlatformDocument2 pages930e4 Cerrejon LH Steps & PlatformfernandojNo ratings yet
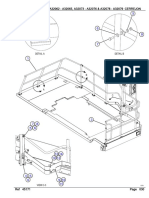
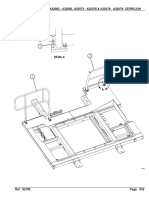
- Afe59-Hc 930e-4 S/N A32062 - A32065, A32073 - A32076 & A32078 - A32079 CerrejonDocument2 pagesAfe59-Hc 930e-4 S/N A32062 - A32065, A32073 - A32076 & A32078 - A32079 CerrejonfernandojNo ratings yet
- 930e4 Cerrejon LH Deck HandrailsDocument2 pages930e4 Cerrejon LH Deck HandrailsfernandojNo ratings yet
- 930e4 Cerrejon Center Deck HandrailsDocument2 pages930e4 Cerrejon Center Deck HandrailsfernandojNo ratings yet
- wm2d Tutorial PDFDocument429 pageswm2d Tutorial PDFfernandoj100% (1)
- Handyscan 3D Training Script - ENDocument98 pagesHandyscan 3D Training Script - ENfernandojNo ratings yet
- SCENE LT 2019.0 User Manual EN PDFDocument253 pagesSCENE LT 2019.0 User Manual EN PDFfernandojNo ratings yet
- Handyscan 3D Training Script - ENDocument98 pagesHandyscan 3D Training Script - ENfernandojNo ratings yet
- Ssab Emea Ab, Se-613 80 Oxelösund, Sweden: Carbon Equivalent Etc C93-C99Document1 pageSsab Emea Ab, Se-613 80 Oxelösund, Sweden: Carbon Equivalent Etc C93-C99fernandojNo ratings yet
- MaxSHOT 3D Training Script - ENDocument53 pagesMaxSHOT 3D Training Script - ENfernandojNo ratings yet
- Ssab Emea Ab, Se-613 80 Oxelösund, Sweden: Carbon Equivalent Etc C93-C99Document1 pageSsab Emea Ab, Se-613 80 Oxelösund, Sweden: Carbon Equivalent Etc C93-C99fernandojNo ratings yet
- J-Bolt Edge System For LHD TramsDocument8 pagesJ-Bolt Edge System For LHD TramsfernandojNo ratings yet
- Weld-On Bucket Heel ShroudsDocument2 pagesWeld-On Bucket Heel ShroudsfernandojNo ratings yet
- Kinetic and Potential Energy Worksheet PDFDocument3 pagesKinetic and Potential Energy Worksheet PDFMya BNo ratings yet
- Franck-Hertz Experiment V3Document7 pagesFranck-Hertz Experiment V3kemoNo ratings yet
- Chapter 9Document5 pagesChapter 9lcmehretNo ratings yet
- Solutions - AIATS Medical-2020 - Test-1 (Code-C & D) - (14-10-2018) PDFDocument34 pagesSolutions - AIATS Medical-2020 - Test-1 (Code-C & D) - (14-10-2018) PDFSunita Aggarwal50% (2)
- PP Roller Coaster EnergyDocument9 pagesPP Roller Coaster Energyapi-3696266No ratings yet
- Creep Modeling For Concrete-Filled Steel Tubes: Wassim Naguib, Amir MirmiranDocument18 pagesCreep Modeling For Concrete-Filled Steel Tubes: Wassim Naguib, Amir Mirmiransaber javidNo ratings yet
- Wave Equation S23Document9 pagesWave Equation S23Maryam AmjadNo ratings yet
- 081 - ME8594, ME6505 Dynamics of Machines - Important QuestionsDocument20 pages081 - ME8594, ME6505 Dynamics of Machines - Important QuestionsKannathal3008 88No ratings yet
- Cross Flow Part 1Document5 pagesCross Flow Part 1mohmmad othmanNo ratings yet
- s2 Physics Trpical Revision Questions Mechanical Properties Nabisunsa Girls Secondary SchoolDocument6 pagess2 Physics Trpical Revision Questions Mechanical Properties Nabisunsa Girls Secondary SchoolAnkunda TrevorNo ratings yet
- Deliverable 2 ThermodynamicsDocument6 pagesDeliverable 2 ThermodynamicsScribdTranslationsNo ratings yet
- General Data: Design of AbutmentDocument18 pagesGeneral Data: Design of AbutmentsurangaNo ratings yet
- Lecture 11 - ME 243 - Shear Stress of BeamsDocument18 pagesLecture 11 - ME 243 - Shear Stress of Beamssalmanalamj5No ratings yet
- Initial Transverse Metacenter CugalDocument19 pagesInitial Transverse Metacenter CugalPete KatipunanNo ratings yet
- Study Guide For Module 5 CONCRETEDocument10 pagesStudy Guide For Module 5 CONCRETEKherstine Muyano TantayNo ratings yet
- Dual Nature Worksheet TUITIONDocument5 pagesDual Nature Worksheet TUITIONAltaf Hussain KhanNo ratings yet
- Thermal Lab-2 Manual CompletedDocument69 pagesThermal Lab-2 Manual CompletedSiva RamanNo ratings yet
- Heat Chap14 119Document16 pagesHeat Chap14 119Kerem GönceNo ratings yet
- QH =TH → 315 KQL=TL→ 277 KQL=2 KJ s γ= W QL Th−Tl TL γ=0.1371 W =γ∗QLW =0.1371∗2=0.2742 KWDocument3 pagesQH =TH → 315 KQL=TL→ 277 KQL=2 KJ s γ= W QL Th−Tl TL γ=0.1371 W =γ∗QLW =0.1371∗2=0.2742 KWDavid Leonardo Rojas NarvaezNo ratings yet
- Structural Mechanism of Traditional Wooden Frames by Dynamic and Static TestsDocument15 pagesStructural Mechanism of Traditional Wooden Frames by Dynamic and Static TestsMarimuthu KaliyamoorthyNo ratings yet
- PDF - Properties of Waves QuestionsDocument3 pagesPDF - Properties of Waves QuestionsPrerana RoshanNo ratings yet
- Base Isolation and BRB FrameDocument39 pagesBase Isolation and BRB FrameFatima AhmedNo ratings yet
- ChemQuest 18Document4 pagesChemQuest 18RobNo ratings yet
- Ap 2Document4 pagesAp 2Muhammad BilalNo ratings yet
- Geotechnical Engineering-I: BSC Civil Engineering - 4 SemesterDocument14 pagesGeotechnical Engineering-I: BSC Civil Engineering - 4 SemesterSudin PradhanNo ratings yet