You might also like
- Experiment 12: Rotational Equilibrium: PurposeDocument6 pagesExperiment 12: Rotational Equilibrium: PurposeRakotoarison Louis FrederickNo ratings yet
- Static BalancingDocument4 pagesStatic Balancingfarhan125No ratings yet
- Equilibrium PsDocument7 pagesEquilibrium PsMuhammadFadzliZulkipNo ratings yet
- Measure curvilinear motion of ballsDocument10 pagesMeasure curvilinear motion of ballsPiyush BhandariNo ratings yet
- Lab Manual - 1Document43 pagesLab Manual - 1Nabeel AhmedNo ratings yet
- Lab6 Centripetal ForceDocument4 pagesLab6 Centripetal ForcemohammedjaafNo ratings yet
- CH-10 Plane Motion of Rigid Bodies 2Document13 pagesCH-10 Plane Motion of Rigid Bodies 2Anshuman SinghNo ratings yet
- Phys 1 Lab ManualDocument13 pagesPhys 1 Lab ManualemuphychemNo ratings yet
- mf2 PDFDocument4 pagesmf2 PDFShweta SridharNo ratings yet
- Resistencia de MaterialesDocument141 pagesResistencia de MaterialesOscar GutierrezNo ratings yet
- Static Equilibrium of Concurrent ForcesDocument5 pagesStatic Equilibrium of Concurrent ForcesAhmed AbuNasserNo ratings yet
- PhysicsDocument4 pagesPhysicspicket1019No ratings yet
- Calculating moments and forces using the principle of momentDocument12 pagesCalculating moments and forces using the principle of momentFatimah AfzalNo ratings yet
- Torque-Parallel Force - George Ricarrson 2501987261Document16 pagesTorque-Parallel Force - George Ricarrson 2501987261George RYNo ratings yet
- Chapter 12Document10 pagesChapter 12Anonymous L90zA7H9yNo ratings yet
- TorqueDocument8 pagesTorqueYeri KimNo ratings yet
- Torque Rotational Dynamics Problem-SolvingDocument6 pagesTorque Rotational Dynamics Problem-Solvingrudresh singhNo ratings yet
- Unit II Balancingofrotatingmasses 210207040000Document23 pagesUnit II Balancingofrotatingmasses 210207040000ShanmuganathanNo ratings yet
- UTHM Mechanical Engineering document on rotor balancingDocument46 pagesUTHM Mechanical Engineering document on rotor balancinghamryNo ratings yet
- Shear Force DiagramDocument16 pagesShear Force DiagramMuhammad ImranNo ratings yet
- 02 Me1 PDFDocument5 pages02 Me1 PDFvat007No ratings yet
- g481 1 2 3 EquilibriumDocument9 pagesg481 1 2 3 Equilibriumapi-236179294No ratings yet
- Torque and EquilibriumDocument8 pagesTorque and EquilibriumEthan TantocoNo ratings yet
- MIT8 01SC Problems27 SolnDocument24 pagesMIT8 01SC Problems27 SolnjamespNo ratings yet
- HWCH 12 BDocument3 pagesHWCH 12 BfcordNo ratings yet
- TorqueDocument8 pagesTorqueKaren May MamarilNo ratings yet
- Torques and Rotational EquilibriumDocument5 pagesTorques and Rotational EquilibriumHopia QuintelNo ratings yet
- Lab 2 2012Document8 pagesLab 2 2012abozman123No ratings yet
- Lab Session No 10: Learning ObjectiveDocument18 pagesLab Session No 10: Learning ObjectiveMuhammad AbdullahNo ratings yet
- Lab 11Document5 pagesLab 11KrishnanNo ratings yet
- Lab Report Indeterminate BeamDocument9 pagesLab Report Indeterminate BeamFatin Samsudin60% (5)
- Verify Law of Moments Using Bell-Crank LeverDocument6 pagesVerify Law of Moments Using Bell-Crank LeverAkankshaNo ratings yet
- Investigate static equilibrium conditions for forces and torquesDocument5 pagesInvestigate static equilibrium conditions for forces and torquesdanny_xx93No ratings yet
- Lab ManualsDocument13 pagesLab ManualssaqibNo ratings yet
- Control Systems LabDocument6 pagesControl Systems LabMuhammad Junaid SialNo ratings yet
- 5.helmholtz Coils - DDDocument6 pages5.helmholtz Coils - DDShubham BirangeNo ratings yet
- PC235 Winter 2013 Classical Mechanics Assignment #4 SolutionsDocument12 pagesPC235 Winter 2013 Classical Mechanics Assignment #4 SolutionskwokNo ratings yet
- Vector Analysis: The Force Table: ObjectDocument5 pagesVector Analysis: The Force Table: ObjectEdward FerrerNo ratings yet
- FaradayDocument5 pagesFaradaysapna24No ratings yet
- Notes TorsionDocument15 pagesNotes TorsionblehsadnjsNo ratings yet
- Balancing of Machinery: Al-Nahrain Uni. Dr. Ahmed Al-Hamaoy Mec. Eng Dep 3 Year Lec. 5Document6 pagesBalancing of Machinery: Al-Nahrain Uni. Dr. Ahmed Al-Hamaoy Mec. Eng Dep 3 Year Lec. 5عبدالله احمدNo ratings yet
- Laboratory 1aDocument7 pagesLaboratory 1aH2 MgZNo ratings yet
- PHYSICSDocument35 pagesPHYSICSPrincess Mae AlejandrinoNo ratings yet
- Report PDFDocument5 pagesReport PDFjacobNo ratings yet
- Chapter 12 Static EquilibriumDocument5 pagesChapter 12 Static Equilibriumbmz00000No ratings yet
- Rotational and Translational Motion ProblemsDocument29 pagesRotational and Translational Motion ProblemsDe Nicolas JaidarNo ratings yet
- Tom 8Document7 pagesTom 8Om TandelNo ratings yet
- C9 BDocument4 pagesC9 BShweta SridharNo ratings yet
- Classical 093Document33 pagesClassical 093Julian David Henao EscobarNo ratings yet
- Final Structure LabDocument38 pagesFinal Structure LabNurul Syuhada0% (1)
- Forces in Equilibrium LabDocument15 pagesForces in Equilibrium LabNabil IbrahimNo ratings yet
- IntroductionDocument9 pagesIntroductionJM085No ratings yet
- Static DynamicDocument6 pagesStatic DynamicKrishna Kumar AlagarNo ratings yet
- 03 ForcesDocument7 pages03 ForcesRishi GovindaHarryNo ratings yet
- EXP4 Bending and TorsionDocument2 pagesEXP4 Bending and Torsionaman chopraNo ratings yet
- Centripetal Force LabDocument6 pagesCentripetal Force LabJohn Vissel F. ParaisoNo ratings yet
- Benedict's ReagentDocument2 pagesBenedict's ReagentAlba ArjunNo ratings yet
- Defining Communication TheoriesDocument9 pagesDefining Communication TheoriesMia SamNo ratings yet
- FghdfghdeujDocument5 pagesFghdfghdeujAlba ArjunNo ratings yet
- FsdfasdfadadaDocument3 pagesFsdfasdfadadaAlba ArjunNo ratings yet
- Hgfjfghjset 4Document83 pagesHgfjfghjset 4Alba ArjunNo ratings yet
- Benedict's ReagentDocument2 pagesBenedict's ReagentAlba ArjunNo ratings yet
- I. Tonsilo-Pharyngeal Infections/inflammations A. AbscessesDocument5 pagesI. Tonsilo-Pharyngeal Infections/inflammations A. AbscessesAlba ArjunNo ratings yet
- Caring for a child with autism requires immense patienceDocument18 pagesCaring for a child with autism requires immense patienceAlba ArjunNo ratings yet
- Benedict's ReagentDocument2 pagesBenedict's ReagentAlba ArjunNo ratings yet
- The Department of Health (DOH) PhilippinesDocument21 pagesThe Department of Health (DOH) PhilippinesAlba ArjunNo ratings yet
- National Institutes of Health Stroke Scale: From Wikipedia, The Free EncyclopediaDocument11 pagesNational Institutes of Health Stroke Scale: From Wikipedia, The Free EncyclopediaAlba ArjunNo ratings yet
- Ineffective Cerebral Tissue Perfusion - Stroke (CVA) Nursing Care Plan (NCP)Document6 pagesIneffective Cerebral Tissue Perfusion - Stroke (CVA) Nursing Care Plan (NCP)Alba ArjunNo ratings yet
- Alba, Arnaldo Jr. A. BSN Iv-3 Group G-1 Assessment Diagnosis Inference Planning Intervention Rationale EvaluationDocument2 pagesAlba, Arnaldo Jr. A. BSN Iv-3 Group G-1 Assessment Diagnosis Inference Planning Intervention Rationale EvaluationAlba ArjunNo ratings yet
- 9 Qualitative Research DesignsDocument14 pages9 Qualitative Research DesignspizdixNo ratings yet
- NCP NSDDocument3 pagesNCP NSDshigemasamayumi60% (5)
- Chapt 1Document7 pagesChapt 1Nurse DianneNo ratings yet
- AdadadadDocument18 pagesAdadadadAlba ArjunNo ratings yet
- AaaaaaaaaaaaaaaaaaDocument11 pagesAaaaaaaaaaaaaaaaaaAlba ArjunNo ratings yet
- Ineffective Cerebral Tissue Perfusion - Stroke (CVA) Nursing Care Plan (NCP)Document6 pagesIneffective Cerebral Tissue Perfusion - Stroke (CVA) Nursing Care Plan (NCP)Alba ArjunNo ratings yet
- Conceptest 9.1: Rolling in The RainDocument16 pagesConceptest 9.1: Rolling in The RainAlba ArjunNo ratings yet
- How computers generate randomness vs true random numbers from RANDOM.ORGDocument1 pageHow computers generate randomness vs true random numbers from RANDOM.ORGAlba ArjunNo ratings yet
- CutDocument1 pageCutAlba ArjunNo ratings yet
- 111 Samp 08Document7 pages111 Samp 08Alba ArjunNo ratings yet
- 111 Samp 08Document7 pages111 Samp 08Alba ArjunNo ratings yet
- Eula Microsoft Visual StudioDocument3 pagesEula Microsoft Visual StudioqwwerttyyNo ratings yet
- Momentum, Impulse, and CollisionsDocument45 pagesMomentum, Impulse, and CollisionsTesfaye KebedeNo ratings yet
- AbstractDocument8 pagesAbstractAlba ArjunNo ratings yet
- Motivation in LearningDocument3 pagesMotivation in LearningAlba ArjunNo ratings yet
- Coping MechanismsDocument9 pagesCoping MechanismsAlba ArjunNo ratings yet
- 2014 Jan P2 QPDocument32 pages2014 Jan P2 QPCassidyNo ratings yet
- Unit 5 Transformation NotesDocument33 pagesUnit 5 Transformation NotesTarun BambhaniyaNo ratings yet
- Solution 2 Vernier CalliperDocument2 pagesSolution 2 Vernier CalliperÂshútösh KumarNo ratings yet
- A Short To Kalman Filters: Alan WashburnDocument31 pagesA Short To Kalman Filters: Alan WashburnrfcNo ratings yet
- Arduindoos Documentation PDFDocument777 pagesArduindoos Documentation PDFJonathan JaegerNo ratings yet
- Tutorial 4Document4 pagesTutorial 4Aayush ChikhalkarNo ratings yet
- L03 FourierDocument60 pagesL03 Fourierفراس فراس فراسNo ratings yet
- Chapter 4 ProbabilityDocument35 pagesChapter 4 ProbabilityB-38Hardev GohilNo ratings yet
- Centennial College Business Math Practice TestDocument9 pagesCentennial College Business Math Practice Testimsehun :DNo ratings yet
- DLL Mathematics 1 q2 w9Document9 pagesDLL Mathematics 1 q2 w9Ruvy Caroro Legara DenilaNo ratings yet
- Geometry Formulas PDFDocument4 pagesGeometry Formulas PDFManuelAlexNo ratings yet
- Java-Interview ProgramsDocument109 pagesJava-Interview ProgramsKumar SwamyNo ratings yet
- CASE STUDY LINEAR EQNSDocument4 pagesCASE STUDY LINEAR EQNSAdithya VinodNo ratings yet
- Sci Lab For NumericalDocument142 pagesSci Lab For NumericalbevNo ratings yet
- Math-9-LAW #4-Q1-4Document8 pagesMath-9-LAW #4-Q1-4Keira cassandra delacruzNo ratings yet
- Chapter - 1 MATHS (1 Marks Questions)Document8 pagesChapter - 1 MATHS (1 Marks Questions)Sukhdeep KaurNo ratings yet
- Scoring IWQOL-Lite FinalDocument5 pagesScoring IWQOL-Lite FinalJennifer CaussadeNo ratings yet
- Last Time TodayDocument34 pagesLast Time TodayHarshvardhan SinghNo ratings yet
- Non-Positional Number System: Data RepresentationDocument13 pagesNon-Positional Number System: Data Representationlixus mwangiNo ratings yet
- Chemistry Education Research and Practice: PaperDocument19 pagesChemistry Education Research and Practice: PaperDian PurnamasariNo ratings yet
- Full Download Solution Manual For Understanding Our Universe 3rd Edition by Stacy Palen Laura Kay George Blumenthal PDF Full ChapterDocument36 pagesFull Download Solution Manual For Understanding Our Universe 3rd Edition by Stacy Palen Laura Kay George Blumenthal PDF Full Chapterancientypyemia1pxotk100% (20)
- Initial Value Problems For ODEsDocument38 pagesInitial Value Problems For ODEsAyananta GuhaNo ratings yet
- BracketsDocument2 pagesBracketsCezar DumitricaNo ratings yet
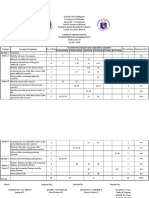
- TOS 3rdDocument8 pagesTOS 3rdMichelle Jacinto FajardoNo ratings yet
- CVDocument13 pagesCVapi-286386211No ratings yet
- Remarks of T7 AppendixDocument9 pagesRemarks of T7 AppendixWong JiayangNo ratings yet
- Numeracy Skills Business Maths II 31102021 063002pmDocument5 pagesNumeracy Skills Business Maths II 31102021 063002pmArsalan AliNo ratings yet
- Introduction To: Information RetrievalDocument67 pagesIntroduction To: Information RetrievalBasit JasaniNo ratings yet
- N Prime NumberDocument6 pagesN Prime NumberGokul ChinnathuraiNo ratings yet