You might also like
- Trabajo VibracionesDocument17 pagesTrabajo VibracionesCesar BautistaNo ratings yet
- Atomic Orbital Basis SetsDocument23 pagesAtomic Orbital Basis SetsJosé CortésNo ratings yet
- Vector Method For The Synthesis of MechanismsDocument12 pagesVector Method For The Synthesis of MechanismsBilal OraikNo ratings yet
- Finite Volume Differencich SchemesDocument45 pagesFinite Volume Differencich SchemesRobert KulhanekNo ratings yet
- Reviews in Computational ChemistryFrom EverandReviews in Computational ChemistryAbby L. ParrillNo ratings yet
- Lecture - 2 - Digital Control SystemDocument77 pagesLecture - 2 - Digital Control Systemtadepeace23No ratings yet
- m4l24 Lesson 24 The Direct Stiffness Method: Truss AnalysisDocument23 pagesm4l24 Lesson 24 The Direct Stiffness Method: Truss AnalysisVitor ValeNo ratings yet
- Classical HamiltonianDocument4 pagesClassical Hamiltonianbatenas1No ratings yet
- Makalah RBL Nuklir (Perhitungan)Document7 pagesMakalah RBL Nuklir (Perhitungan)fitri kurniatiNo ratings yet
- Ecture Nverse Inematics: 1 DefinitionDocument13 pagesEcture Nverse Inematics: 1 Definitionulysse_d_ithaqu7083No ratings yet
- Circuit TheoryDocument534 pagesCircuit TheorysuhelNo ratings yet
- The American Astronomical Society. All Rights Reserved. Printed in U.S.A. (Document18 pagesThe American Astronomical Society. All Rights Reserved. Printed in U.S.A. (Tee Wei LeongNo ratings yet
- From Structural Analysis To Finite Element MethodDocument25 pagesFrom Structural Analysis To Finite Element MethodB S Praveen BspNo ratings yet
- CH 7Document10 pagesCH 7aprilswapnilNo ratings yet
- 3.1 Characterization of The Region of AttractionDocument7 pages3.1 Characterization of The Region of AttractiontetrixNo ratings yet
- Electric Potential and Electric Field - TRUEDocument6 pagesElectric Potential and Electric Field - TRUElily sapphire dersonNo ratings yet
- 2011isse SCCDocument10 pages2011isse SCCssfofoNo ratings yet
- Logistic Map Circuit PDFDocument8 pagesLogistic Map Circuit PDFmenguemengueNo ratings yet
- Application of Carson's EquationDocument6 pagesApplication of Carson's EquationRuchita SonsiNo ratings yet
- Power Systems Using Energy Functions: Modal-Based Stability Analysis ofDocument6 pagesPower Systems Using Energy Functions: Modal-Based Stability Analysis ofAmel ZeriguiNo ratings yet
- Load Technique: Reliable Flow For RadialDocument7 pagesLoad Technique: Reliable Flow For Radialamiteetumtech2013No ratings yet
- Electric Energy of A System of Point ChargesDocument8 pagesElectric Energy of A System of Point Chargeseka123No ratings yet
- Neural Network Based Inverse Kinematics Solution F PDFDocument8 pagesNeural Network Based Inverse Kinematics Solution F PDFBara Abu ShaqraNo ratings yet
- F. Devreux and J. P. Boucher - Solitons in Ising-Like Quantum Spin Chains in A Magnetic Field: A Second Quantization ApproachDocument8 pagesF. Devreux and J. P. Boucher - Solitons in Ising-Like Quantum Spin Chains in A Magnetic Field: A Second Quantization ApproachPo48HSDNo ratings yet
- Figure 1. System of Three Charges.: Example Problem: Model of A Carbon NucleusDocument8 pagesFigure 1. System of Three Charges.: Example Problem: Model of A Carbon Nucleuseka123No ratings yet
- Calculation of PCB Track ImpedanceDocument6 pagesCalculation of PCB Track ImpedanceDurbha RaviNo ratings yet
- Calculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station PrefaceDocument11 pagesCalculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station Prefaceh_salkicNo ratings yet
- Double Dot CodingDocument18 pagesDouble Dot CodingaruNo ratings yet
- Control System Synthesis by Root Locus PDFDocument4 pagesControl System Synthesis by Root Locus PDFSohail AhmedNo ratings yet
- Lab Report - Electric Fields and EquipotentialsDocument9 pagesLab Report - Electric Fields and EquipotentialsCuong Nguyen100% (1)
- SW ModelDocument10 pagesSW Modelcipcirip2010No ratings yet
- PHY3QMO - Computational AssignmentDocument4 pagesPHY3QMO - Computational AssignmentReally SexyNo ratings yet
- MaxwellDocument6 pagesMaxwelljulianoeqxNo ratings yet
- Module 3: Sequence Components and Fault Analysis: Sequence ComponentsDocument11 pagesModule 3: Sequence Components and Fault Analysis: Sequence Componentssunny1725No ratings yet
- Chapter - 2 Power Flow AnalysisDocument24 pagesChapter - 2 Power Flow AnalysisdivyaNo ratings yet
- Kinematics Text Ch. 5 & 6Document145 pagesKinematics Text Ch. 5 & 6ClearMind84No ratings yet
- Validity Check of Mutual Inductance Formulas For Circular Filaments With Lateral and Angular Misalignments S. I. Babic PIER M 2009Document12 pagesValidity Check of Mutual Inductance Formulas For Circular Filaments With Lateral and Angular Misalignments S. I. Babic PIER M 2009Cristian LiviuNo ratings yet
- High Field Transport in Semiconductors Based On Eigenvalue Solution To BoltzmannDocument4 pagesHigh Field Transport in Semiconductors Based On Eigenvalue Solution To Boltzmannsh0001No ratings yet
- Bond Graphs of The Electrical ELC CircuitDocument9 pagesBond Graphs of The Electrical ELC CircuitkdjgkldfjlNo ratings yet
- Van EllaDocument12 pagesVan EllaParedes Puelles Sammy CristopherNo ratings yet
- Aeroelasticity PDFDocument19 pagesAeroelasticity PDFFabio BarrosNo ratings yet
- The Analytical Approaches To Calculation of Electric Machines On The Basis of The Annular Domains Boundary Problems Solution by The Method of Fourier Variables SeparationDocument38 pagesThe Analytical Approaches To Calculation of Electric Machines On The Basis of The Annular Domains Boundary Problems Solution by The Method of Fourier Variables Separationni60No ratings yet
- Theoretical Study of A Shunt Reactor Sub Synchronous Resonance StabilizerDocument14 pagesTheoretical Study of A Shunt Reactor Sub Synchronous Resonance StabilizerFranck Mofati KasangalaNo ratings yet
- A Bifurcation Analysis of The Forced Van Der Pol OscillatorDocument34 pagesA Bifurcation Analysis of The Forced Van Der Pol OscillatorArun SharmaNo ratings yet
- Control Systems-Lab Manual 11newDocument4 pagesControl Systems-Lab Manual 11newmanni1220122No ratings yet
- Lagrange Housner HudsonDocument60 pagesLagrange Housner HudsonDanielMontesdeocaNo ratings yet
- Quaccs Scientific Python Module HandoutDocument6 pagesQuaccs Scientific Python Module HandoutDeborah CrittendenNo ratings yet
- Week 9A & 9B - Online Ckasses - S2020Document42 pagesWeek 9A & 9B - Online Ckasses - S2020Muhammad Tayyab YousafzaiNo ratings yet
- Method of Analysis:: 1-Geometry DescriptionDocument3 pagesMethod of Analysis:: 1-Geometry Descriptionbadr amNo ratings yet
- Control of Magnetic Levitation SystemDocument15 pagesControl of Magnetic Levitation SystemordekNo ratings yet
- 1995 WongDocument6 pages1995 WongJaqueline RezendeNo ratings yet
- Chapter 5Document39 pagesChapter 5HemantNo ratings yet
- A New Efficient Method For Load-Flow Solution For Radial Distribution NetworksDocument8 pagesA New Efficient Method For Load-Flow Solution For Radial Distribution NetworksjorgiieNo ratings yet
- Multi Layer Soil ResisitivityDocument9 pagesMulti Layer Soil ResisitivityBhavana McNo ratings yet
- Term Paper 630Document6 pagesTerm Paper 630Sandeep PatwaNo ratings yet
- Chapter 6Document18 pagesChapter 6ehmyggasNo ratings yet
- Theory and Applications of the Empirical Valence Bond Approach: From Physical Chemistry to Chemical BiologyFrom EverandTheory and Applications of the Empirical Valence Bond Approach: From Physical Chemistry to Chemical BiologyFernanda DuarteNo ratings yet
- Rc284@cornell - Edu: Wrinkling of Stretched Elastic Films Via BifurcationDocument1 pageRc284@cornell - Edu: Wrinkling of Stretched Elastic Films Via BifurcationCristian BucataNo ratings yet
- Membrane Pag 11Document1 pageMembrane Pag 11Cristian BucataNo ratings yet
- On The Calculation of Elastic Systems Having Blocks and Sagging CablesDocument2 pagesOn The Calculation of Elastic Systems Having Blocks and Sagging CablesCristian BucataNo ratings yet
- 3.1 Deformation and Stress DistributionDocument1 page3.1 Deformation and Stress DistributionCristian BucataNo ratings yet
- 2.1.1 Tensile Field Theory Mothod: 2.1 Comparison of Two Wrinkling Analysis MethodsDocument1 page2.1.1 Tensile Field Theory Mothod: 2.1 Comparison of Two Wrinkling Analysis MethodsCristian BucataNo ratings yet
- 2.2 Numerical ApproachDocument1 page2.2 Numerical ApproachCristian BucataNo ratings yet
- 2.1 Analytical ApproachDocument1 page2.1 Analytical ApproachCristian BucataNo ratings yet
- Case StudiesDocument1 pageCase StudiesCristian BucataNo ratings yet
- Membrane 20Document3 pagesMembrane 20Cristian BucataNo ratings yet
- Cable and Membrane ElementsDocument2 pagesCable and Membrane ElementsCristian BucataNo ratings yet
- CSICOL Manual PDFDocument108 pagesCSICOL Manual PDFRoberto Enrique Sanchez AlemanNo ratings yet
- Flat Slab BhavikattiDocument23 pagesFlat Slab BhavikattiSharath GuptaNo ratings yet
- MCQ It 1 Oct 2020Document8 pagesMCQ It 1 Oct 2020Narayan ManeNo ratings yet
- Department of Physics University of Narowal: Assignment No.2 Assignment Topic: Conservative and Non Conservative ForcesDocument9 pagesDepartment of Physics University of Narowal: Assignment No.2 Assignment Topic: Conservative and Non Conservative ForcesALi HaiderNo ratings yet
- Design Guide For SHS CFC, 2005.Document73 pagesDesign Guide For SHS CFC, 2005.prisciliano1No ratings yet
- 9.6 MCQDocument6 pages9.6 MCQmalikdoo5alNo ratings yet
- 4363 112 Heat TransferDocument6 pages4363 112 Heat Transferyogesh_b_kNo ratings yet
- Support Roller Thrust Load MeasurementsDocument11 pagesSupport Roller Thrust Load Measurementspasha100% (2)
- Advanced Fluid Mechanics: SS 2020 Prof. Dr. O. EiffDocument6 pagesAdvanced Fluid Mechanics: SS 2020 Prof. Dr. O. EiffCamille CrnNo ratings yet
- Theory of MachineDocument4 pagesTheory of MachinePradip PatelNo ratings yet
- 17me3302 - Unit One TheoryDocument70 pages17me3302 - Unit One TheoryZayeem ZehekNo ratings yet
- Final Examination Question BankDocument2 pagesFinal Examination Question BankKarthik BhavanashiNo ratings yet
- SN002a (NCCi - Determination of Non-Dimensional Slenderness of I and H Sections)Document11 pagesSN002a (NCCi - Determination of Non-Dimensional Slenderness of I and H Sections)Hamati RamiNo ratings yet
- 278 - Someehneshin - Wellbore Stability of Highly DeviatedDocument1 page278 - Someehneshin - Wellbore Stability of Highly DeviatedJa MesNo ratings yet
- Quantum Physics: Black Body RadiationDocument7 pagesQuantum Physics: Black Body Radiationsmcoolguy68No ratings yet
- Ch26 Giancoli7e ManualDocument24 pagesCh26 Giancoli7e ManualRMNo ratings yet
- 25.06.23 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-3 - Key&solDocument14 pages25.06.23 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-3 - Key&solAnonymous A6Jnef04No ratings yet
- What Makes A Special Moment Frame SpecialDocument3 pagesWhat Makes A Special Moment Frame SpecialMehdi FarrokhiNo ratings yet
- CPE 524 PLATE NO. 6 Theory 1 & Structural Design 1Document3 pagesCPE 524 PLATE NO. 6 Theory 1 & Structural Design 1mike reyesNo ratings yet
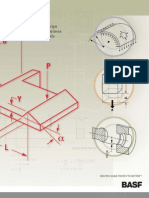
- BASF Design Solution GuideDocument86 pagesBASF Design Solution Guideomerscheen80% (5)
- CE Board Problems in PhysicsDocument4 pagesCE Board Problems in PhysicsChristopher PantojaNo ratings yet
- Lecture 5-Electric Properties of MatterDocument15 pagesLecture 5-Electric Properties of Matterana carolina aristizabalNo ratings yet
- Chapter 1 PDFDocument9 pagesChapter 1 PDFB ChandNo ratings yet
- Drilled Cast-In-Place Pile Design Based On ACI 318-19: Project: Client: Design By: Job No.: Date: Review byDocument2 pagesDrilled Cast-In-Place Pile Design Based On ACI 318-19: Project: Client: Design By: Job No.: Date: Review byafvilavilanoriegaNo ratings yet
- Heat Transfer CoefficientDocument42 pagesHeat Transfer CoefficientVenkatesh RYNo ratings yet
- Hori-Bracing Connection Design 4 BoltsDocument22 pagesHori-Bracing Connection Design 4 BoltsUmer AziqNo ratings yet
- Fire Resistance of CFTDocument24 pagesFire Resistance of CFTsjh1016No ratings yet
- 1-1 - Kinematics Motion Along Straigt LineDocument14 pages1-1 - Kinematics Motion Along Straigt LineJoanna LeeNo ratings yet
- Q4 ExamDocument7 pagesQ4 ExamMARILYN ANTONIO ONGKIKONo ratings yet
- Ejercicios Cap 10 Cinetica Lineal HamillDocument3 pagesEjercicios Cap 10 Cinetica Lineal HamillLuisa MendozaNo ratings yet
- UNIT 4 Field Tests in RockDocument43 pagesUNIT 4 Field Tests in RockSanko KosanNo ratings yet
- Physical Sciences P1 Feb-March 2010 EngDocument17 pagesPhysical Sciences P1 Feb-March 2010 EngKershen MaharajNo ratings yet