You might also like
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- Measurment SystemDocument18 pagesMeasurment SystemAlhji AhmedNo ratings yet
- Measurement Systems: Application and Design by Ernest O. DoebelinDocument18 pagesMeasurement Systems: Application and Design by Ernest O. DoebelinAlhji AhmedNo ratings yet
- EOMDocument20 pagesEOMmonty montyNo ratings yet
- Electro Static Deflection in CRTDocument43 pagesElectro Static Deflection in CRTutadaneelimadeviutadaNo ratings yet
- CRO Bs-3rdDocument44 pagesCRO Bs-3rdAbdur RehmanNo ratings yet
- Ask A Demonstrator If You Are Unsure How To Use The Apparatus. Hand in Answers To DR - Waters at The End of The SessionDocument3 pagesAsk A Demonstrator If You Are Unsure How To Use The Apparatus. Hand in Answers To DR - Waters at The End of The SessionRoy VeseyNo ratings yet
- Chapter 3Document48 pagesChapter 3Ram Bahadur KhadkaNo ratings yet
- Polarization and Modern OpticsDocument12 pagesPolarization and Modern OpticsCharles BernandoNo ratings yet
- CRODocument59 pagesCRONaman SharmaNo ratings yet
- Cro Saravana SelviDocument25 pagesCro Saravana SelviIndranil KutheNo ratings yet
- Cro ModifiedDocument34 pagesCro Modifiedsatya_vanapalli3422No ratings yet
- Unit1croppt 141013124117 Conversion Gate02Document25 pagesUnit1croppt 141013124117 Conversion Gate02Rahul ShindeNo ratings yet
- Experiment No. 14 Planck's Constant (Photo Electric Effect)Document6 pagesExperiment No. 14 Planck's Constant (Photo Electric Effect)Somdyuti momoNo ratings yet
- Lecture 6 Optical ModulatorsDocument26 pagesLecture 6 Optical ModulatorsSyed Muhammad DanishNo ratings yet
- CRO Practical SPTGDocument5 pagesCRO Practical SPTGdarshanNo ratings yet
- Experiment No. 14 Planck's Constant Measuring With FiltersDocument6 pagesExperiment No. 14 Planck's Constant Measuring With FiltersSarveenaNo ratings yet
- Cathode Ray OscilloscopeDocument24 pagesCathode Ray OscilloscopeAntonovNo ratings yet
- 5.MW Polarization Concept & CCDP DesignDocument19 pages5.MW Polarization Concept & CCDP DesignmumerbuttNo ratings yet
- CRO Controls From The Front PanelDocument6 pagesCRO Controls From The Front PanelVarunKumar100% (1)
- 3965 Electronic Instruments IIIT-BhDocument34 pages3965 Electronic Instruments IIIT-BhMani Kumar AmarlapudiNo ratings yet
- Lesson 3instrumentationsystemelementsDocument21 pagesLesson 3instrumentationsystemelementsRhandel ZamoraNo ratings yet
- Expt 15Document10 pagesExpt 15rameshamruthaluriNo ratings yet
- TEM-Sci MatDocument66 pagesTEM-Sci MatAahil AleemNo ratings yet
- Ins I Unit IDocument10 pagesIns I Unit IGomathi PappaNo ratings yet
- Introduction To CRO - Cathode Ray OscilloscopeDocument12 pagesIntroduction To CRO - Cathode Ray OscilloscopelakshmanakiranNo ratings yet
- Lab 7 TransducersDocument14 pagesLab 7 Transducers27189No ratings yet
- M Systems: ScilloscopesDocument6 pagesM Systems: ScilloscopesAnkit KumarNo ratings yet
- International Islamic University, Islamabad: Antennas and Wave Propagation LabDocument4 pagesInternational Islamic University, Islamabad: Antennas and Wave Propagation LabTayyaba MunawarNo ratings yet
- Properties of Light:: SearchDocument8 pagesProperties of Light:: SearchdkishoreNo ratings yet
- Optical Transmission Signal Phase Compensation Method Using An ImageDocument12 pagesOptical Transmission Signal Phase Compensation Method Using An Imagerqpkwcvh9gNo ratings yet
- Observation of Microwave Emission of Sun and SNRDocument9 pagesObservation of Microwave Emission of Sun and SNRBaranya Raj LahkarNo ratings yet
- Special Oscilloscopes - 01 - Biasing at Point 7Document6 pagesSpecial Oscilloscopes - 01 - Biasing at Point 7Shane LaraNo ratings yet
- MAINTOPIC Displacement MeasurementDocument43 pagesMAINTOPIC Displacement MeasurementLoreto CorderoNo ratings yet
- Displacement, and Proximity Sensor: PositionDocument31 pagesDisplacement, and Proximity Sensor: PositionapuroopmNo ratings yet
- 3.3introduction To CRO - Cathode Ray Oscilloscope: Block DiagramDocument12 pages3.3introduction To CRO - Cathode Ray Oscilloscope: Block DiagramAddisu Safo BoseraNo ratings yet
- Calculation of Planck Constant Using Photocell: Name: Shivam Roll No.: 20313127Document13 pagesCalculation of Planck Constant Using Photocell: Name: Shivam Roll No.: 20313127shivamNo ratings yet
- EDMIDocument8 pagesEDMIMus'ab UsmanNo ratings yet
- Astons Mass Spectrograph by Sonu RaniDeptt. of PhysicsDocument4 pagesAstons Mass Spectrograph by Sonu RaniDeptt. of PhysicsDNo ratings yet
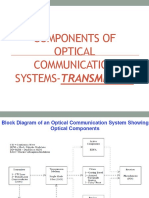
- Components of Optical Communication Systems-TransmitterDocument31 pagesComponents of Optical Communication Systems-TransmitterMuhammad HamidNo ratings yet
- Magnetron Is A Grouping of ADocument7 pagesMagnetron Is A Grouping of AkattaswamyNo ratings yet
- Introduction To Electro-OpticsDocument34 pagesIntroduction To Electro-OpticspraadiitaaNo ratings yet
- Faculty of Engineering Electrical and Electronic Engineering Department EE521Document16 pagesFaculty of Engineering Electrical and Electronic Engineering Department EE521adamNo ratings yet
- Converting AC Source To DC Source Using Rectifiers: AbstractDocument4 pagesConverting AC Source To DC Source Using Rectifiers: AbstractTin ManejeroNo ratings yet
- Principles of Measurement and Instrumentation EKT 112: OscilloscopeDocument40 pagesPrinciples of Measurement and Instrumentation EKT 112: OscilloscopesambavaleNo ratings yet
- Optical Current TransformerDocument22 pagesOptical Current TransformerchallaramcharanreddyNo ratings yet
- Intro To Beam InstrumentationDocument38 pagesIntro To Beam InstrumentationDen BavisNo ratings yet
- By: Gebremariam Fisseha Adigrat University, Ethiopia 2010E.CDocument17 pagesBy: Gebremariam Fisseha Adigrat University, Ethiopia 2010E.CYosef KirosNo ratings yet
- Polarized Light ExperimentDocument6 pagesPolarized Light ExperimentmirckyNo ratings yet
- Electron Spin Resonance ExperimentDocument6 pagesElectron Spin Resonance ExperimentArooj Mukarram100% (1)
- Presentation 2Document18 pagesPresentation 2rudrrasanghvi44% (9)
- Review of Radiological Imaging - Xray ProductionDocument10 pagesReview of Radiological Imaging - Xray ProductionM PedrosoNo ratings yet
- Cathode Ray Tube Construction and WorkingDocument12 pagesCathode Ray Tube Construction and WorkingadsddvsNo ratings yet
- Chapter 14Document15 pagesChapter 14Gaurav SharmaNo ratings yet
- Position Sensor: D KA CDocument8 pagesPosition Sensor: D KA CJamalkhanNo ratings yet
- Experiment 7. Wave PropagationDocument9 pagesExperiment 7. Wave PropagationAlex TrinhNo ratings yet
- Microwave ComponentsDocument13 pagesMicrowave Componentssnehal100% (1)
- ADC ManualDocument47 pagesADC ManualRavi ShuklaNo ratings yet
- Planning & BSS: Saurabh Mehra & Aniket Varadpande GET 09Document64 pagesPlanning & BSS: Saurabh Mehra & Aniket Varadpande GET 09Rakhi JadavNo ratings yet
- Powernotes330 151223093543Document330 pagesPowernotes330 151223093543vlsipranatiNo ratings yet
- Lab 1Document16 pagesLab 1vlsipranatiNo ratings yet
- Verilog For Sequential Circuits: Design of Digital Circuits 2014 Srdjan Capkun Frank K. GürkaynakDocument51 pagesVerilog For Sequential Circuits: Design of Digital Circuits 2014 Srdjan Capkun Frank K. GürkaynakvlsipranatiNo ratings yet
- Embedded Systems ProgrammingDocument36 pagesEmbedded Systems ProgrammingvlsipranatiNo ratings yet
- 4 FSMDocument13 pages4 FSMraitou_yagamiNo ratings yet
- Lec13 PDFDocument26 pagesLec13 PDFvlsipranatiNo ratings yet
- Basic Electronic & Transistor Circuits PDFDocument54 pagesBasic Electronic & Transistor Circuits PDFSandeep GoyalNo ratings yet
- Measurement Systems: Application and Design by Ernest O. DoebelinDocument17 pagesMeasurement Systems: Application and Design by Ernest O. DoebelinvlsipranatiNo ratings yet
- ENGR 107 - Introduction To Engineering: Estimation, Accuracy and Precision, and Significant FiguresDocument32 pagesENGR 107 - Introduction To Engineering: Estimation, Accuracy and Precision, and Significant FiguresvlsipranatiNo ratings yet
- Measurement Systems: Application and Design by Ernest O. DoebelinDocument11 pagesMeasurement Systems: Application and Design by Ernest O. DoebelinvlsipranatiNo ratings yet
- Measurement Systems: Application and Design by Ernest O. DoebelinDocument12 pagesMeasurement Systems: Application and Design by Ernest O. Doebelinvlsipranati100% (1)
- Accuracy Is The Closeness of A Measured Value To The True - For Example, The Measured Density of Water Has Become More Accurate With Improved Experimental Design, Technique, and EquipmentDocument15 pagesAccuracy Is The Closeness of A Measured Value To The True - For Example, The Measured Density of Water Has Become More Accurate With Improved Experimental Design, Technique, and EquipmentvlsipranatiNo ratings yet
- Accuracy & Precision in MeasurementDocument14 pagesAccuracy & Precision in MeasurementvlsipranatiNo ratings yet
- Presentation On Software TestingDocument14 pagesPresentation On Software TestingvlsipranatiNo ratings yet
- SQL Query Practice SolutionDocument7 pagesSQL Query Practice SolutionvlsipranatiNo ratings yet
- Antentop 2009-01Document103 pagesAntentop 2009-01Black OnionNo ratings yet
- 01-02 VXLAN Deployment ModesDocument4 pages01-02 VXLAN Deployment ModesAbdelhaiNo ratings yet
- 1964 1obli ChronicleDocument12 pages1964 1obli Chronicleapi-198872914No ratings yet
- 2017 2 FallDocument6 pages2017 2 FallTerrace ClubNo ratings yet
- DLP Extra On Formation of ElementsDocument9 pagesDLP Extra On Formation of ElementsDaniah AllemaNo ratings yet
- Insitu GelDocument96 pagesInsitu Gelvinsijuvin555No ratings yet
- DLL Grade 8 Q3-Week 1-4Document16 pagesDLL Grade 8 Q3-Week 1-4Angela Camille Paynante100% (1)
- Open School Installation GuideDocument17 pagesOpen School Installation GuideHarryTendulkarNo ratings yet
- 7 MODULE 7 Nervous SystemDocument29 pages7 MODULE 7 Nervous SystemCHARIEMAE CA�AZARESNo ratings yet
- Field2014 TheJournalofAsianStudiesDocument18 pagesField2014 TheJournalofAsianStudiesRevathi SakthiNo ratings yet
- Comparison of Time Domain Flutter Analysis Using A Reduced Order ModelDocument25 pagesComparison of Time Domain Flutter Analysis Using A Reduced Order ModelTheNo ratings yet
- IPC ProjectDocument15 pagesIPC ProjectAshish ChandaheNo ratings yet
- Impact of Health Information Technology Adoption and Its Drivers On Quality of Care & Patient Safety in The Health Care Sector of PakistanDocument18 pagesImpact of Health Information Technology Adoption and Its Drivers On Quality of Care & Patient Safety in The Health Care Sector of PakistanRima RaisyiahNo ratings yet
- PSY354 Lecture 2 (Anatomy)Document24 pagesPSY354 Lecture 2 (Anatomy)kadiatou konateNo ratings yet
- Eng Sca 0001 RedDocument64 pagesEng Sca 0001 RedAndrea GibsonNo ratings yet
- 2016 Challenger CAT 01.pdfDocument81 pages2016 Challenger CAT 01.pdfAditya SuruNo ratings yet
- Structure DetailDocument1 pageStructure DetailAnil SharmaNo ratings yet
- Sundaram Questions Assorted From GroupDocument23 pagesSundaram Questions Assorted From GroupAbu Syeed Md. Aurangzeb Al MasumNo ratings yet
- Episode 1 FS 2Document9 pagesEpisode 1 FS 2Daniela RiosNo ratings yet
- Drufelcnc Ddcm6V5 (Ddream) Installation ManualDocument32 pagesDrufelcnc Ddcm6V5 (Ddream) Installation ManualgowataNo ratings yet
- Week 5 Worksheets Per DevDocument2 pagesWeek 5 Worksheets Per Devdolomite whitesandNo ratings yet
- Ent300 7Document51 pagesEnt300 7Hazyan HamdanNo ratings yet
- Mar 2019 SGVDocument24 pagesMar 2019 SGVBien Bowie A. CortezNo ratings yet
- Extemporaneous RubricDocument2 pagesExtemporaneous RubricGeorge Kevin TomasNo ratings yet
- S-CMT01 - Mechanical Training MCQ Screw Compressors - Presentations - EnglishDocument204 pagesS-CMT01 - Mechanical Training MCQ Screw Compressors - Presentations - Englishjmdc88% (8)
- Manual Topworx D Esd Partial Stroke Emergency Shut Down Iom Topworx en 4852782Document28 pagesManual Topworx D Esd Partial Stroke Emergency Shut Down Iom Topworx en 4852782Juan LuisNo ratings yet
- Share File Marrying The Downhill Run Game With The SpreadDocument82 pagesShare File Marrying The Downhill Run Game With The SpreadCoach Big B100% (5)
- Chapter 18 Module Mood DisorderDocument6 pagesChapter 18 Module Mood DisorderCheetah GemmaNo ratings yet
- R in Hydrology - EGUDocument25 pagesR in Hydrology - EGUJulio Montenegro GambiniNo ratings yet
- MobilenetV2 (Quantization)Document4 pagesMobilenetV2 (Quantization)Akash BhogarNo ratings yet