You might also like
- DY 20L ManualDocument154 pagesDY 20L Manualhmbx100% (6)
- (Uav) - Hovercraft Thrust Calculation in A Duct Fan Assembly For HovercraftDocument14 pages(Uav) - Hovercraft Thrust Calculation in A Duct Fan Assembly For Hovercraftlyly209No ratings yet
- 2016 TC55H ManualDocument19 pages2016 TC55H ManualLuis Raul Diaz AviñaNo ratings yet
- Manual Programacion 8025 Torno Fagor-InglesDocument309 pagesManual Programacion 8025 Torno Fagor-InglesMarc VancellNo ratings yet
- Fanuc 16i 18i 160i 180i Model Pa Parameter ManualDocument76 pagesFanuc 16i 18i 160i 180i Model Pa Parameter ManualGanaNo ratings yet
- Test Bank For Principles of Physics A Calculus Based Text 5th EditionDocument11 pagesTest Bank For Principles of Physics A Calculus Based Text 5th Editionteniasisrehearsex8ei100% (21)
- Forced VortexDocument5 pagesForced VortexVrushiket Patil75% (4)
- Instruction Manual: Indfurr Superheat FurnacesDocument17 pagesInstruction Manual: Indfurr Superheat Furnacesewis02No ratings yet
- Tap Lenh PLC MitsubishiDocument220 pagesTap Lenh PLC MitsubishiHiền NguyễnNo ratings yet
- Programmable Logic Controller (PLC) and Automation: SBO/ PMM/ EJ501/ Jun2011Document31 pagesProgrammable Logic Controller (PLC) and Automation: SBO/ PMM/ EJ501/ Jun2011Jeeva RajNo ratings yet
- FP-X Instruct eDocument96 pagesFP-X Instruct eThuan Bui ThanhNo ratings yet
- Manual ULTIMOS VARIADORES BANDA 2022.4.19Document11 pagesManual ULTIMOS VARIADORES BANDA 2022.4.19produccion multipackNo ratings yet
- f7z 8162 Villamos Tengely SzoftverDocument12 pagesf7z 8162 Villamos Tengely SzoftverrezakaihaniNo ratings yet
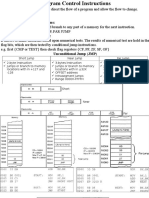
- Unconditional Jump InstructionsDocument13 pagesUnconditional Jump InstructionsAnonymous T9VvkMaNo ratings yet
- Chapter 3. Cad, Cam CimDocument50 pagesChapter 3. Cad, Cam Cimahmed jemalNo ratings yet
- CNC 8025 T, TS: New FeaturesDocument309 pagesCNC 8025 T, TS: New Featuresjean bartNo ratings yet
- Fanuc Lathe ProgramDocument93 pagesFanuc Lathe Programnguyenanhso100% (1)
- CNCmakers-EP100 B QuickGuide-EN - EP100Document14 pagesCNCmakers-EP100 B QuickGuide-EN - EP100Angelica PeñarandaNo ratings yet
- Exp1 LCD KBDDocument5 pagesExp1 LCD KBDkunaalk44No ratings yet
- Maxthermo Pid ControllersDocument24 pagesMaxthermo Pid ControllersmoncieldonNo ratings yet
- InsDocument74 pagesInsfalcon21152115No ratings yet
- Control Ningbo NBSL Nsfc01-01 Control System (4sw)Document14 pagesControl Ningbo NBSL Nsfc01-01 Control System (4sw)Winderson Macauran89% (18)
- Speed Command RPM: - Inv033 - Movevelocityrpm: Inv 033 Basic Function SymbolDocument4 pagesSpeed Command RPM: - Inv033 - Movevelocityrpm: Inv 033 Basic Function SymbolJosephNo ratings yet
- Ferrettronics Ft639 Servo Controller Chip: Data SheetDocument7 pagesFerrettronics Ft639 Servo Controller Chip: Data SheetAldo DimasNo ratings yet
- P8822-000-R SERIES Dual Axes Position ControllerDocument29 pagesP8822-000-R SERIES Dual Axes Position ControllerAliali SmieoNo ratings yet
- TOPCNC TC55V Instruction Manual: TOPCNC Automation Technology Co., Ltd. Felicia JiaDocument13 pagesTOPCNC TC55V Instruction Manual: TOPCNC Automation Technology Co., Ltd. Felicia Jiaanhthong3kNo ratings yet
- Honeywell Dc1000 Dc1010 Dc1030 Dc1040 ManualDocument29 pagesHoneywell Dc1000 Dc1010 Dc1030 Dc1040 ManualRicardo Zapata Badillo50% (2)
- Identity and Service Programming of Sailor Re2100Document8 pagesIdentity and Service Programming of Sailor Re2100Stas MNo ratings yet
- Korg DW-8000 Service ManualDocument47 pagesKorg DW-8000 Service ManualMatthew DavidsonNo ratings yet
- Upute Ems20Document69 pagesUpute Ems20ammelinoNo ratings yet
- Manual 5438Document24 pagesManual 5438gemacuNo ratings yet
- New TOPCNC TC55V Instruction ManualDocument14 pagesNew TOPCNC TC55V Instruction ManualCarlos SerranoNo ratings yet
- 8 New Arithmetic Commands and The Intel 8086 Flag BitsDocument6 pages8 New Arithmetic Commands and The Intel 8086 Flag BitsJohn Brix BalisterosNo ratings yet
- Application Note AN-VG7-001v101EN Encoder Check and Pole Tuning Procedure For PMSM in Lift ApplicationsDocument4 pagesApplication Note AN-VG7-001v101EN Encoder Check and Pole Tuning Procedure For PMSM in Lift ApplicationshassanNo ratings yet
- Digital Vfo: Instruction ManualDocument24 pagesDigital Vfo: Instruction Manualzarkinos sakisNo ratings yet
- Instruction Manual: Electronic Cams ProgrammerDocument24 pagesInstruction Manual: Electronic Cams Programmerwellinton de paulo RomanoNo ratings yet
- Simple Step Command Set and Communications ProtocolDocument10 pagesSimple Step Command Set and Communications ProtocolJose CoraNo ratings yet
- NCCPU110 MoveInterrupt REALDocument6 pagesNCCPU110 MoveInterrupt REALJosephNo ratings yet
- JLR 10 Instruction SupplementDocument6 pagesJLR 10 Instruction SupplementAria SudarmanNo ratings yet
- Quick Guide of PI8100 Operation6-7Document24 pagesQuick Guide of PI8100 Operation6-7Luis Jaramillo100% (1)
- Datos A Tomar en CuentaDocument18 pagesDatos A Tomar en CuentaEkenlat Aeterna TenebrisNo ratings yet
- Apollo 7 RDVZDocument10 pagesApollo 7 RDVZmathgntNo ratings yet
- URZWERG EnglishDocument2 pagesURZWERG EnglishAhmed ChouchaneNo ratings yet
- WT Operation ManualDocument51 pagesWT Operation ManualpngchanhNo ratings yet
- MTC Operation ManualDocument32 pagesMTC Operation ManualXcd SteflerNo ratings yet
- Fagor 8055tcDocument50 pagesFagor 8055tcKamil BabiarzNo ratings yet
- 70k07 e (Start Up)Document60 pages70k07 e (Start Up)Bakhtiar AkhmadNo ratings yet
- Lect 4 PDFDocument14 pagesLect 4 PDFSaif AlabdullahNo ratings yet
- HY-TB3DV-N 3 Axis Driver Board Manual PDFDocument12 pagesHY-TB3DV-N 3 Axis Driver Board Manual PDFjoelgcrNo ratings yet
- NC Positioning Instruction FUN 141 Mpara Motion Parameter Setting For High Speed Pulse Output FUN 141 MparaDocument4 pagesNC Positioning Instruction FUN 141 Mpara Motion Parameter Setting For High Speed Pulse Output FUN 141 MparaAlexsander VasquezNo ratings yet
- MAN DRO NV 300M v2.xxDocument52 pagesMAN DRO NV 300M v2.xxAntonio Marcos CarvalhoNo ratings yet
- PIC Tutorial AsmDocument20 pagesPIC Tutorial Asmdanilucio64No ratings yet
- 27 Ao 31Document41 pages27 Ao 31brunogrange96No ratings yet
- Fagor Dro NVP-M: Installation ManualDocument70 pagesFagor Dro NVP-M: Installation Manualpmc_pmcNo ratings yet
- DF 5A+Instruction+ManualDocument15 pagesDF 5A+Instruction+ManualCarlos Gerardo Becerra GarcíaNo ratings yet
- AB PLC Program To Maintain Level of A TankDocument3 pagesAB PLC Program To Maintain Level of A TankSivaNo ratings yet
- FANUC Robot Series R-30iB CONTROLLER - MantenanceDocument8 pagesFANUC Robot Series R-30iB CONTROLLER - MantenanceRicardo André Pereira100% (1)
- ManualDocument36 pagesManualSandoval GuimarãesNo ratings yet
- NOVA OSD V1.0 ManualDocument7 pagesNOVA OSD V1.0 ManualAltemarFernandesdeOliveiraNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Dynamic Modeling and Analysis of A Two-Wheeled Inverted Pendulum RobotDocument6 pagesDynamic Modeling and Analysis of A Two-Wheeled Inverted Pendulum RobotMartín ReynosoNo ratings yet
- L1 - Kinematics 1DDocument70 pagesL1 - Kinematics 1DAnurag SahuNo ratings yet
- CH01 - Kinematics of A ParticleDocument80 pagesCH01 - Kinematics of A ParticleToby IsabiNo ratings yet
- 2017 HKDSE Physics Paper 1A SolDocument32 pages2017 HKDSE Physics Paper 1A SolAlex KongNo ratings yet
- 05 (Inc) JR Iit - Co-Sc Wat-11 Adv (Model-A) - 09-07-2023 - 2171082Document18 pages05 (Inc) JR Iit - Co-Sc Wat-11 Adv (Model-A) - 09-07-2023 - 2171082Sonakshi BansalNo ratings yet
- The Application of Lagrange EquationsDocument6 pagesThe Application of Lagrange EquationsVinit AhluwaliaNo ratings yet
- Ch-02 Kinematics: Daily Practice Problem 01Document5 pagesCh-02 Kinematics: Daily Practice Problem 01Abhishek JainNo ratings yet
- Bank Math Bible-Boats and Streams - Probability (WWW - Exambd.net) PDFDocument22 pagesBank Math Bible-Boats and Streams - Probability (WWW - Exambd.net) PDFAL AminNo ratings yet
- Physics: Principles ofDocument20 pagesPhysics: Principles ofNishan SunarNo ratings yet
- DownloadDocument9 pagesDownloadPramod AGNo ratings yet
- Phy110 Chapter 3Document57 pagesPhy110 Chapter 3SOFIAH NAJWA BINTI SHAMSUDDINNo ratings yet
- Class 11 CHAPTER-3 Physics Motion in A Straight LineDocument11 pagesClass 11 CHAPTER-3 Physics Motion in A Straight LineHakim Abbas Ali PhalasiyaNo ratings yet
- Class-9 Science Extra QuestionsDocument36 pagesClass-9 Science Extra Questionsbhaweshsuda29No ratings yet
- Exp 3 - Rolling Disc and AxleDocument7 pagesExp 3 - Rolling Disc and AxleCoco YapNo ratings yet
- 2024 F Ma Sols-2Document5 pages2024 F Ma Sols-2S RNo ratings yet
- Work, Energy and Power: 4.1 Work Work Is The Transfer of Energy From One Object To Another, Due To The Application of ADocument17 pagesWork, Energy and Power: 4.1 Work Work Is The Transfer of Energy From One Object To Another, Due To The Application of AKeith Alfred GargarNo ratings yet
- Chapter 3: Kinematics (Average Speed and Velocity) : ObjectivesDocument4 pagesChapter 3: Kinematics (Average Speed and Velocity) : ObjectivesRuby CocalNo ratings yet
- Dropper - Level 1 - Motion in 1 D (Variable Motion)Document6 pagesDropper - Level 1 - Motion in 1 D (Variable Motion)Manoj GuptaNo ratings yet
- O' Level Physics Formula Sheet: MeasurementsDocument2 pagesO' Level Physics Formula Sheet: MeasurementsXOXOuser39938No ratings yet
- Expt 06 Centripetal Force LabDocument3 pagesExpt 06 Centripetal Force Labsamruddhi1996No ratings yet
- Universal Laws of PhysicsDocument64 pagesUniversal Laws of Physicsbae joohyunNo ratings yet
- Curvilinear Translation Students Hand OutsDocument6 pagesCurvilinear Translation Students Hand OutsPauline CreoNo ratings yet
- Yo Yo PDFDocument3 pagesYo Yo PDFHuck KimNo ratings yet
- Rectilinear Motion EquationsDocument28 pagesRectilinear Motion EquationsKris MascardoNo ratings yet
- Methods of Diameter Determination (08!23!06)Document11 pagesMethods of Diameter Determination (08!23!06)olarykNo ratings yet
- Motion GraphingDocument12 pagesMotion Graphingapi-325864985No ratings yet