You might also like
- Vector Control of Induction MotorDocument10 pagesVector Control of Induction MotorRam Uday MandalNo ratings yet
- Electrical Safety Hospital PDFDocument86 pagesElectrical Safety Hospital PDFShodiqun100% (1)
- Reluctance MotorDocument24 pagesReluctance Motorpraveenpv7100% (1)
- 3 Line ConverterDocument10 pages3 Line ConverterJay Romar PabianiaNo ratings yet
- Analysis of Non-Isolated Bidirectional DC-DC Converter With ZVSDocument7 pagesAnalysis of Non-Isolated Bidirectional DC-DC Converter With ZVSAnuja VargheseNo ratings yet
- Electrical Machine and DrivesDocument18 pagesElectrical Machine and DrivesNEERAJ27TRIPATHINo ratings yet
- Chp5 DC Motor DrivesDocument38 pagesChp5 DC Motor Drivesblaze emberNo ratings yet
- Speed Control of DC Motor Using ChopperDocument16 pagesSpeed Control of DC Motor Using Choppersunil kumarNo ratings yet
- Industrial DrivesDocument1 pageIndustrial DrivesSatish NurukurthiNo ratings yet
- Synchronous Motor AC DrivesDocument40 pagesSynchronous Motor AC DrivesHarshal Thakur100% (1)
- Dcmotors and Their RepresentationDocument61 pagesDcmotors and Their RepresentationSoeprapto AtmariNo ratings yet
- Modelling and Simuation of BLDC Motor in MATLAB GUIDocument5 pagesModelling and Simuation of BLDC Motor in MATLAB GUIvishiwizardNo ratings yet
- DC Motor S: Anand 08338958770Document79 pagesDC Motor S: Anand 08338958770Rohit AvasthiNo ratings yet
- Circuit Simulation of A BLDC MotorDocument4 pagesCircuit Simulation of A BLDC Motorjpmacabasco100% (1)
- Scalar Control of Ac DrivesDocument38 pagesScalar Control of Ac Drivessureshy-ee213No ratings yet
- Induction Motor DrivesDocument73 pagesInduction Motor DrivesSai Pranahita KulithalaiNo ratings yet
- Unit 2 PDFDocument170 pagesUnit 2 PDFSaurabh RajNo ratings yet
- Operation Manual: Saike Fuel DispenserDocument21 pagesOperation Manual: Saike Fuel DispenserUpenyu MutsumbaNo ratings yet
- DC Ac ConverterDocument51 pagesDC Ac ConverteraswardiNo ratings yet
- Transition From MELSEC-AnSQnAS (Small Type) Series To Q Series Handbook - Intelligent Function ModulesDocument328 pagesTransition From MELSEC-AnSQnAS (Small Type) Series To Q Series Handbook - Intelligent Function ModulesAym BrNo ratings yet
- Induction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFDocument7 pagesInduction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFbalajiNo ratings yet
- Power Electronics Converters and their Control for Renewable Energy ApplicationsFrom EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikNo ratings yet
- Power Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersFrom EverandPower Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersNo ratings yet
- ISOBUS Workshop in Brazil - Test Procedures For ISOBUS - DLG Testing (Molen)Document29 pagesISOBUS Workshop in Brazil - Test Procedures For ISOBUS - DLG Testing (Molen)Victor A. Parcianello BensoNo ratings yet
- Vector Control of Induction MotorDocument11 pagesVector Control of Induction MotorTushar GargNo ratings yet
- Chp6 DC Motor Drives (Uncontrolled and Controlled Rectifier) - FinalDocument49 pagesChp6 DC Motor Drives (Uncontrolled and Controlled Rectifier) - Finalblaze emberNo ratings yet
- Model CC-D: Instruction ManualDocument172 pagesModel CC-D: Instruction ManualBruce Adorno100% (2)
- HPED Assignment 2: DC DrivesDocument4 pagesHPED Assignment 2: DC DrivesShadNo ratings yet
- Comparison of FOC and DTCDocument6 pagesComparison of FOC and DTCchienbkaNo ratings yet
- Questions 1Document11 pagesQuestions 1anvithaNo ratings yet
- Unit 3Document5 pagesUnit 3Narasimman DonNo ratings yet
- Four Quadrant Operation of DC Drives: - Dual ConvertersDocument12 pagesFour Quadrant Operation of DC Drives: - Dual ConvertersDr.K.Krishna Veni ProfessorNo ratings yet
- Basic SVPWMDocument6 pagesBasic SVPWMVAMSIKRISHNAEEENo ratings yet
- 16 MarksDocument4 pages16 MarksAnand RamanNo ratings yet
- Chopper Controlled DC DrivesDocument1 pageChopper Controlled DC Drives852963No ratings yet
- Stepper MotorsDocument26 pagesStepper MotorsRam Kumar GogadaNo ratings yet
- Chapter 4 - Dynamic AnalysisDocument16 pagesChapter 4 - Dynamic AnalysisDimple Sharma100% (1)
- Advantages and Disadvantages of Single Phase MotorsDocument10 pagesAdvantages and Disadvantages of Single Phase Motorsim always awesome100% (1)
- Electric DrivesDocument2 pagesElectric DrivesnikunjNo ratings yet
- Electrical Drives Ans ControlsDocument40 pagesElectrical Drives Ans Controlsjeyasaravanan77No ratings yet
- Single Phase Semi and Full Converter DC Separately Excited MotorDocument3 pagesSingle Phase Semi and Full Converter DC Separately Excited MotorHeliosAlaricNo ratings yet
- Question Bank-EE2352 - Solid State DrivesDocument4 pagesQuestion Bank-EE2352 - Solid State Drivesdgsgovind100% (1)
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDocument6 pagesPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniNo ratings yet
- BrakingDocument19 pagesBrakingMohammad Umar RehmanNo ratings yet
- Eee-Vii-Industrial Drives and Applications (10ee74) - Question PaperDocument4 pagesEee-Vii-Industrial Drives and Applications (10ee74) - Question PaperAbhishek ChandelNo ratings yet
- Electric Machines and Drives 1st EditionDocument16 pagesElectric Machines and Drives 1st EditionBellaaNo ratings yet
- 2 Modeling of DC MachinesDocument23 pages2 Modeling of DC MachinessubhasishpodderNo ratings yet
- Speed Control of A Separately Excited DC MotorDocument2 pagesSpeed Control of A Separately Excited DC MotorKashyap SrishaNo ratings yet
- Chapter 1 DC Drives Part1Document46 pagesChapter 1 DC Drives Part1Mohammad MunzirNo ratings yet
- Voltage Control of Single-Phase InvertersDocument17 pagesVoltage Control of Single-Phase Invertersmailmanugs100% (1)
- Closed Loop Control of Separately Excited DC MotorDocument13 pagesClosed Loop Control of Separately Excited DC MotorJAIRAJ MIRASHINo ratings yet
- Chapter 6 - Synchronous Motors PDFDocument23 pagesChapter 6 - Synchronous Motors PDFYousab CreatorNo ratings yet
- PX7203-Special Electrical Machines PDFDocument11 pagesPX7203-Special Electrical Machines PDFvaishnavisriNo ratings yet
- 2002 Lecture - 5-7Document21 pages2002 Lecture - 5-7acc gemNo ratings yet
- Ee 1403 Solid State DrivesDocument14 pagesEe 1403 Solid State DrivesPanchi AgrawalNo ratings yet
- Transfer Function of The DC Motor (Yaser Rahmati)Document4 pagesTransfer Function of The DC Motor (Yaser Rahmati)Farag AlargtNo ratings yet
- Position ControlDocument3 pagesPosition Controls k sahuNo ratings yet
- Speed Control of DC Motor Using Sliding Mode Control ApproachDocument5 pagesSpeed Control of DC Motor Using Sliding Mode Control ApproachIOSRjournalNo ratings yet
- Electric BrakingDocument27 pagesElectric Brakingmastanamma.YNo ratings yet
- An Serv 002 PDFDocument20 pagesAn Serv 002 PDFMario TapiaNo ratings yet
- Capacitor Start/Run Induction Motor: ExperimentDocument9 pagesCapacitor Start/Run Induction Motor: ExperimentMarcos Roberto ReinertNo ratings yet
- Speed Control of DC MotorDocument4 pagesSpeed Control of DC MotorjitbakNo ratings yet
- Ee2352 Solid State Drives PDFDocument1 pageEe2352 Solid State Drives PDFMuruga Raj0% (1)
- Industrial Instrumentationandcontrol 05 EE62 XXDocument56 pagesIndustrial Instrumentationandcontrol 05 EE62 XXAnuja VargheseNo ratings yet
- 1 EE301 Power Generation, Transmission and ProtectionDocument4 pages1 EE301 Power Generation, Transmission and ProtectionAnuja VargheseNo ratings yet
- Smart GridDocument15 pagesSmart GridAnuja VargheseNo ratings yet
- Non Isolated Bidirectional DC DC ConverterDocument6 pagesNon Isolated Bidirectional DC DC ConverterAnuja VargheseNo ratings yet
- Micro Switch Hdls Limit Ps 002354-1-En FinalDocument39 pagesMicro Switch Hdls Limit Ps 002354-1-En Finalharshal161987No ratings yet
- Through Frame Slide-Out - Webinar V1 Handout PDFDocument11 pagesThrough Frame Slide-Out - Webinar V1 Handout PDFElliot DorenNo ratings yet
- Chapter 79 - Engine Oil System: BHT-412-CR&O-6Document6 pagesChapter 79 - Engine Oil System: BHT-412-CR&O-6252nd PAS100% (1)
- Standart Connection Bolting AcheDocument1 pageStandart Connection Bolting Achebayu kusumaNo ratings yet
- sw12 - MU - PDF (Módulo Persianas)Document56 pagessw12 - MU - PDF (Módulo Persianas)Pemuy OkiNo ratings yet
- Water JetDocument2 pagesWater JetBayu Cmag Miliek Yanna100% (1)
- A Digital Combination Lock For Home and Auto SecurityDocument5 pagesA Digital Combination Lock For Home and Auto SecurityPeeters GuyNo ratings yet
- 1 - Flender Simogear Helical Geared Motor DZ, DZF, DZB, DZZ Series CatalogueDocument116 pages1 - Flender Simogear Helical Geared Motor DZ, DZF, DZB, DZZ Series CataloguesanatikalaNo ratings yet
- U3 - 01 - Project ECycle Naming BriefDocument6 pagesU3 - 01 - Project ECycle Naming BriefVilaçaNo ratings yet
- Quick Start GuideDocument16 pagesQuick Start Guideno oneNo ratings yet
- Pub059 014 00 - 0299Document4 pagesPub059 014 00 - 0299ravi kumarNo ratings yet
- Clamps: Pull Clamping System Pull Clamping System Hook TypeDocument106 pagesClamps: Pull Clamping System Pull Clamping System Hook TypeCollin FarNo ratings yet
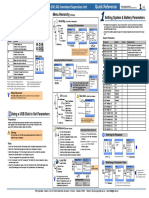
- ZXDU CSU500 (SV1.0G) Centralized Supervision Unit Quick ReferenceDocument4 pagesZXDU CSU500 (SV1.0G) Centralized Supervision Unit Quick ReferenceSebastian Davila Montes100% (1)
- Polguide Final PalDocument15 pagesPolguide Final Paldeepak kumarNo ratings yet
- 7XV75xx Catalog en LDocument10 pages7XV75xx Catalog en LRaturatu RatuNo ratings yet
- 3ware: Supports The 9000 SeriesDocument126 pages3ware: Supports The 9000 SeriesmaldelreyNo ratings yet
- DT Scania FMX 440Document24 pagesDT Scania FMX 440raja MudaNo ratings yet
- Catalog - VIEWSKY® Roof Top TentDocument13 pagesCatalog - VIEWSKY® Roof Top TentSunMori IndustiralNo ratings yet
- RF PaperDocument7 pagesRF PaperPalmNo ratings yet
- MC93F5516 AbovDocument140 pagesMC93F5516 AbovElmo CarlosNo ratings yet
- MeasurIT Flexim Fastening Parts 0910Document5 pagesMeasurIT Flexim Fastening Parts 0910cwiejkowskaNo ratings yet
- Final Documentation: For Window Wiper & Heating GlassDocument21 pagesFinal Documentation: For Window Wiper & Heating GlassVinay Kumar NeelamNo ratings yet
- Rotary Vane Type Compressor: ConstructionDocument5 pagesRotary Vane Type Compressor: ConstructionMoiz TinwalaNo ratings yet
- NVDs Assignment 1Document2 pagesNVDs Assignment 1Sabeeh SafdarNo ratings yet
- Ds Eum 200sxxxdg Rev.bDocument15 pagesDs Eum 200sxxxdg Rev.bFrancisco PizarroNo ratings yet