You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Tacometro y Velocimetro ScaniaDocument48 pagesTacometro y Velocimetro ScaniaChristian Ramos Campos60% (5)
- TachoDocument55 pagesTachoRaja BabuNo ratings yet
- Nyambe African Adventures An Introduction To African AdventuresDocument5 pagesNyambe African Adventures An Introduction To African AdventuresKaren LeongNo ratings yet
- RPM IndicatorDocument39 pagesRPM IndicatorAnkur PatelNo ratings yet
- DTC P0500 Corolla Altis 2006Document3 pagesDTC P0500 Corolla Altis 2006ardi agusman100% (2)
- MODEL 1715 ServiceDocument44 pagesMODEL 1715 ServiceLinggar UmardiNo ratings yet
- Design and Implementation of A Digital TachometerDocument3 pagesDesign and Implementation of A Digital TachometerInnovative Research Publications0% (1)
- Digital Tachometer Using Arduino Plus Speed ControlDocument3 pagesDigital Tachometer Using Arduino Plus Speed ControlCarioquenhoNo ratings yet
- Digital Tachometer Using Arduino Plus Speed Control.Document3 pagesDigital Tachometer Using Arduino Plus Speed Control.elvergonzalez1No ratings yet
- Digital TachometerDocument12 pagesDigital TachometerHariniNo ratings yet
- Digital TachometerDocument4 pagesDigital TachometerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Temperature Sensed Motor ControlDocument10 pagesTemperature Sensed Motor ControlminteNo ratings yet
- Tachometer Using ArduinoDocument4 pagesTachometer Using ArduinoJamMnx_No ratings yet
- Contact Less Digital Tachometer: Mini Project OnDocument45 pagesContact Less Digital Tachometer: Mini Project OnMayur Chandak0% (1)
- Tachometer Using Optical SensorDocument11 pagesTachometer Using Optical SensormyusernameatscribdNo ratings yet
- Digital Tachometer Using Arduino Plus Speed Control.: RPM SensorDocument3 pagesDigital Tachometer Using Arduino Plus Speed Control.: RPM SensorJeyadheepan KaNo ratings yet
- Design of A Contactless TachometerDocument2 pagesDesign of A Contactless TachometershivNo ratings yet
- RPM Counter Using Micro ControllerDocument16 pagesRPM Counter Using Micro ControllerNitesh Kumar Sen100% (1)
- Avr Project - Atmega8 Based RPM MeterDocument11 pagesAvr Project - Atmega8 Based RPM MetersatyamNo ratings yet
- DTC P0500 Vehicle Speed Sensor Malfunction: Circuit DescriptionDocument3 pagesDTC P0500 Vehicle Speed Sensor Malfunction: Circuit DescriptionJimmyNo ratings yet
- Taxi Fare MeterDocument6 pagesTaxi Fare MeterJawad malik0% (2)
- 99 000 RPM Contact Less Digital TachometerDocument11 pages99 000 RPM Contact Less Digital TachometerHemanth Kumar K SNo ratings yet
- Degital Techacometer.Document5 pagesDegital Techacometer.poornarithikNo ratings yet
- Microcontroller Based TACHOMETER: Mini Project ReportDocument13 pagesMicrocontroller Based TACHOMETER: Mini Project ReportmounikabhavanaNo ratings yet
- Final Report - EHDcodeDocument13 pagesFinal Report - EHDcodeShreya AgrawalNo ratings yet
- The 85 MM Speedometer Requires A Dash Panel Hole Diameter of 86mm. It Can Accommodate A Maximum Dash Panel Thickness of 7mmDocument3 pagesThe 85 MM Speedometer Requires A Dash Panel Hole Diameter of 86mm. It Can Accommodate A Maximum Dash Panel Thickness of 7mmCarlos OrregoNo ratings yet
- Hand Gesture Control Robot PDFDocument3 pagesHand Gesture Control Robot PDFMd IrfanNo ratings yet
- Project Report KanojDocument17 pagesProject Report KanojKanoj Bsn100% (3)
- Rajshahi University of Engineering &technologyDocument4 pagesRajshahi University of Engineering &technologyদিব্যজয় পালNo ratings yet
- Circuit Inspection DTC 42 No. 1 Speed Sensor Circuit (Back Up Sensor) MalfunctionDocument3 pagesCircuit Inspection DTC 42 No. 1 Speed Sensor Circuit (Back Up Sensor) Malfunctioncelestino tuliaoNo ratings yet
- Speed Control of Induction Motor by Using IR11Document16 pagesSpeed Control of Induction Motor by Using IR11Anuj TripathiNo ratings yet
- RPM CounterDocument4 pagesRPM CountermailtoakhilsNo ratings yet
- Embedded Day 2Document27 pagesEmbedded Day 2199SARAS MISHRANo ratings yet
- Digital Tachometer Using Arduino Plus Motor Speed Control. Circuit Diagram and ProgramDocument12 pagesDigital Tachometer Using Arduino Plus Motor Speed Control. Circuit Diagram and ProgramtummalapaliraviNo ratings yet
- I Am Sharing 'Speed Measurement' With You PDFDocument24 pagesI Am Sharing 'Speed Measurement' With You PDFYASH VERMANo ratings yet
- Working Principle: 1) System CheckDocument8 pagesWorking Principle: 1) System CheckHans IngoleNo ratings yet
- Me104 Lab7Document16 pagesMe104 Lab7Abul Barkat Mollah Sayeed Ud DoulahNo ratings yet
- Mechatronics Project PDFDocument7 pagesMechatronics Project PDFTrived DoijodNo ratings yet
- Digital Tachometer Project ReportDocument57 pagesDigital Tachometer Project Reportcooldharap70% (10)
- Design of A Low-Cost Contact-Less Digital - Like PDFDocument3 pagesDesign of A Low-Cost Contact-Less Digital - Like PDFMed MaxNo ratings yet
- Accelerometer (PROJ REPORT)Document22 pagesAccelerometer (PROJ REPORT)Priya SharmaNo ratings yet
- C017010018 PDFDocument9 pagesC017010018 PDFtolasa gonfaNo ratings yet
- Digital Tachometer: Nelson Murwariya (100104077) Rohit Raj (100104108) Sumit Rajput (100104130Document14 pagesDigital Tachometer: Nelson Murwariya (100104077) Rohit Raj (100104108) Sumit Rajput (100104130Sumit RajputNo ratings yet
- Mini Report Final1Document33 pagesMini Report Final1kanjisarathNo ratings yet
- Low Cost Digital Tachometer: Date: 15.12.2018Document24 pagesLow Cost Digital Tachometer: Date: 15.12.2018Razu AhmmedNo ratings yet
- Uc Based TachometerDocument4 pagesUc Based TachometerB Hari KrishnaNo ratings yet
- DC Motor Control ReportDocument21 pagesDC Motor Control ReportNishant SinghNo ratings yet
- GSM Security SystemDocument5 pagesGSM Security SystemPreru PreranaNo ratings yet
- GSM Security SystemDocument5 pagesGSM Security SystemVivek Chandra YadavNo ratings yet
- Radar 1622 Service ManualDocument42 pagesRadar 1622 Service Manualaepsaepudin7033No ratings yet
- Ci P0500Document2 pagesCi P0500David BenazeraNo ratings yet
- 1.1 Objective:: MBICTDocument47 pages1.1 Objective:: MBICTsagarparikh31yahoo_cNo ratings yet
- Wall Follower Robot1Document12 pagesWall Follower Robot1Zolani Dingaan100% (1)
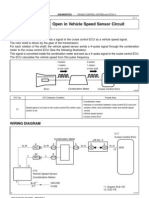
- DTC 21 Open in Vehicle Speed Sensor CircuitDocument3 pagesDTC 21 Open in Vehicle Speed Sensor CircuitErln LimaNo ratings yet
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- XU-CSG Cabinet Minutes of Meeting - April 4Document5 pagesXU-CSG Cabinet Minutes of Meeting - April 4Harold John LaborteNo ratings yet
- Perturbation MethodsDocument29 pagesPerturbation Methodsmhdr100% (1)
- Operational Readiness and Airport TransferDocument2 pagesOperational Readiness and Airport TransferochweriNo ratings yet
- Comparitive Study of Fifty Cases of Open Pyelolithotomy and Ureterolithotomy With or Without Double J Stent InsertionDocument4 pagesComparitive Study of Fifty Cases of Open Pyelolithotomy and Ureterolithotomy With or Without Double J Stent InsertionSuril VithalaniNo ratings yet
- Rab Sikda Optima 2016Document20 pagesRab Sikda Optima 2016Julius Chatry UniwalyNo ratings yet
- Principles To Action (Short)Document6 pagesPrinciples To Action (Short)nsadie34276No ratings yet
- Four Hour Body Experiment Tracker TemplateDocument4 pagesFour Hour Body Experiment Tracker Templatechanellekristyweaver100% (1)
- Assembly InstructionsDocument4 pagesAssembly InstructionsAghzuiNo ratings yet
- Shaker ScreenDocument2 pagesShaker ScreenRiaz EbrahimNo ratings yet
- MQXUSBDEVAPIDocument32 pagesMQXUSBDEVAPIwonderxNo ratings yet
- Jurnal 1 Ieevee LPF PDFDocument4 pagesJurnal 1 Ieevee LPF PDFNanda SalsabilaNo ratings yet
- San Mateo Daily Journal 01-28-19 EditionDocument28 pagesSan Mateo Daily Journal 01-28-19 EditionSan Mateo Daily JournalNo ratings yet
- BSDDocument26 pagesBSDEunnicePanaliganNo ratings yet
- Ose Sample QuotationDocument37 pagesOse Sample Quotationrj medelNo ratings yet
- Statistical Techniques EE 532Document1 pageStatistical Techniques EE 532AdnanNo ratings yet
- For ClosureDocument18 pagesFor Closuremau_cajipeNo ratings yet
- GA Power Capsule For SBI Clerk Mains 2024 (Part-2)Document82 pagesGA Power Capsule For SBI Clerk Mains 2024 (Part-2)aa1904bbNo ratings yet
- Atom SDDocument5 pagesAtom SDatomsa shiferaNo ratings yet
- Risk Analysis and Assessment Methodologies in Work SitesDocument49 pagesRisk Analysis and Assessment Methodologies in Work SitesNhut NguyenNo ratings yet
- Ariba Collaborative Sourcing ProfessionalDocument2 pagesAriba Collaborative Sourcing Professionalericofx530No ratings yet
- Contemp Person Act.1Document1 pageContemp Person Act.1Luisa Jane De LunaNo ratings yet
- Participatory EvaluationDocument4 pagesParticipatory EvaluationEvaluación Participativa100% (1)
- Zambia National FormularlyDocument188 pagesZambia National FormularlyAngetile Kasanga100% (1)
- K MCQsDocument6 pagesK MCQsF ParikhNo ratings yet
- EmployWise JAVA ASSIGNMENTDocument2 pagesEmployWise JAVA ASSIGNMENTPreet PatelNo ratings yet
- Steel Price Index PresentationDocument12 pagesSteel Price Index PresentationAnuj SinghNo ratings yet
- Annex To ED Decision 2013-015-RDocument18 pagesAnnex To ED Decision 2013-015-RBurse LeeNo ratings yet
- Biscotti: Notes: The Sugar I Use in France, Is CalledDocument2 pagesBiscotti: Notes: The Sugar I Use in France, Is CalledMonica CreangaNo ratings yet
- Chestionar 2Document5 pagesChestionar 2Alex AndruNo ratings yet