Chapter 3 : Elements of Realiazability Theory
Difference between Network Analysis and Synthesis:
For any network, three things are associated with it. These are network elements, input
i.e. excitation to the network and output i.e. response from the network.
In the network analysis the network elements are known and the excitation is also known.
Using number of methods, the networks are studied and responses are obtained. Such a response
is unique for a given network and known excitation. So obtaining a response for a known
network and known excitation is called network analysis. Uptill now number of methods and
theorems are studied to analyze the network.
In the network synthesis, the procedure is exactly opposite to the network analysis. The
excitation is known and the response requirements are known. It is necessary to find the network
satisfying the requirements.
Key Points: Thus obtaining a network for known excitation and known response
requirements is called Network Synthesis.
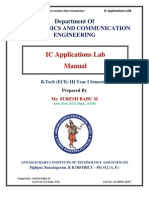
The basic difference between network analysis and network synthesis is shown in the figure..
Figure 1. Difference between Analysis and Synthesis
Another important difference between analysis and synthesis is that the analysis gives the
solution i.e. response which is always unique. But synthesis may give different solutions i.e.
networks satisfying the specifications.
Key Point: The synthesis does not give us the solution
Sometimes it may not give solution. For example, the specification of the network is that its
impedance Z(S) must be 10. Synthesizing of this specification may give the network with only
one 10 resistance or two 5 resistances in series or two 20 resistances in parallel and so on.
So, synthesis solution is not unique. Similarly specifications like Z(S) = -10 cannot be
satisfied using passive elements. Thus synthesis may not give any solution also.
We have seen that driving point impedance and admittance functions for all the networks,
consisting of passive elements are not rational and in the form of ratio of two polynomials in S.
But it is not possible that every ration of two polynomials in S can be synthesized with passive
elements.
Nalla Nandakishore, ECEG-WSU
�Chapter 3 : Elements of Realiazability Theory
3.1. Causality and Stability:
Consider the system function H(S) which is the ratio of Laplace Transform of Output
R(S) to the Laplace Transform of Excitation E(S).
R ( S)
H ( s )=
Eq.1
E(S)
In the synthesis, we are going to obtain a network from the given system function which
may be admittance function or Impedance Function. But before synthesizing H(S) it is necessary
to check whether H(S) is physically realizable or not, using passive elements. For this there are
two important conditions related to a network which are Causality and Stability.
Now there cannot be output without input i.e. there cannot be current without any
voltage. So there exists a cause and effect relationship between input and output. This is nothing
but Causality. To have the given network to be Causal, the impulse response of the network must
be zero for t < 0. The impulse response of the network is the Laplace inverse of H(S) as Laplace
transform of unit impulse is Unity
h ( t )=0, t <0 Eq.2
This is the required condition for the network to be Causal. Thus the impulse response
2t
h ( t ) =e
u ( t ) is causal as u(t)=0 for t < 0 thus h(t) is also zero for t < 0. While the response
2|t|
like h ( t ) =e
is not causal.
Practically in certain cases, the impulse response can be made causal by delaying it.
Consider the response h(t) shown in figure is not causal but by delaying it by T, it becomes zero
for all t < 0 and hence becomes causal.
If the response is delayed by T then it becomes causal and realizable. For a system function to be
causal in frequency domain, it must satisfy the condition that h(t) must possess a Fourier
Transform H(j) and the square magnitude function
|H ( j)| must be integrable .i.e.,
Nalla Nandakishore, ECEG-WSU
�Chapter 3 : Elements of Realiazability Theory
+
|H ( j )| d< Eqn.3
If the system function is to be causal then it must satisfy the condition in frequency domain
called Paley-wiener criterion. The criterion states that it is necessary and sufficient condition
for an amplitude function
+
|log |H ( j )||
1+ 2
|H ( j)| to be causal that,
d < Eqn .4
This means that the amplitude
|H ( j)| of realizable i.e. causal network must not be aero
over a finite band of frequencies.
Similar to causality, the network must be checked for stability. The network is said to be stable if,
1. It produces a bounded output for a bounded input
2. There is no output if input is reduced to zero.
Thus, if e(t) is the excitation and |e (t)|< k 1 for 0 t<
then the output r(t) must satisfy
|r (t )|<k 2 for 0 t< . The K1, K2 are real, positive, finite constants.
The Stable network must satisfy the condition that its impulse response must be absolutely
integrable.
+
|h( )|d< Eqn .5
This gets satisfied when the impulse response h(t) approaches to Zero as t approaches infinity,
lim h(t ) 0 Eqn.6
t
In general, for a stable network, the impulse response must be bounded for all t i.e.
|h(t)|< K
for all t, where, K is positive, real, and finite number.
Now the functions like sin (t) and cos (t) are bounded but not absolutely integrable.
Such systems have poles on the imaginary axis. These systems are not stable from integration
definition but stable from bounded definitions. Such systems are called marginally stable
systems.
For the stability of the system function H(S), it must satisfy the following conditions,
1. H(S) should not have a pole in the right half of s-plane.
Nalla Nandakishore, ECEG-WSU
�Chapter 3 : Elements of Realiazability Theory
2. The poles of H(S) on the imaginary axis must be not repeated. There should not be
multiple poles of H(S) on imaginary axis.
3. The degree of numerator of H(S) cannot exceed the degree of denominator by more than
unity.
Thus first step in the synthesis is to obtain the information whether the given function is
realizable or not. For a given function to be realizable it is essential that the network function
should satisfy all the properties of Hurwitz polynomials and those of positive real functions.
Hence before the study of actual synthesis, it is necessary to study the properties of Hurwitz
polynomials and the positive real functions.
3.2.
HURWITZ POLNOMIALS
For a polynomial P(s) to be a Hurwitz polynomial, it has to satisfy following basic properties.
1. The polynomial P(s) is real whens is real.
2. The roots of the polynomial P(s) have real parts which are either zero or negative.
In addition to these basic properties, Hurwitz polynomial has to satisfy few more properties.
3.2.1. Properties of Hurwitz Polynomials
Consider a polynomial P(s) of order n as,
P ( s )=an Sn +a n1 sn1 ++ a1 s+ a0
where an, an-1,
a0 are the coefficients.
For the Polynomial P(s) to be Hurwitz,
1. All the coefficients ai are real and nonnegative. Thus all coefficients a n to a0 must be
positive.
2. All the terms starting from highest powers of S to lowest power of S must be present. No
power of S should be missing in between.
Nalla Nandakishore, ECEG-WSU