You might also like
- 16th Edition IEE Wiring Regulations: Design and Verification of Electrical InstallationsFrom Everand16th Edition IEE Wiring Regulations: Design and Verification of Electrical InstallationsRating: 4 out of 5 stars4/5 (1)
- Energy Efficiency in Motor Systems Proceedings of The 11th International ConferenceDocument748 pagesEnergy Efficiency in Motor Systems Proceedings of The 11th International Conferencedelta_scopeNo ratings yet
- Electrician's Tools of The TradeDocument12 pagesElectrician's Tools of The TradeJames Adrian Abalde Sabo100% (1)
- Induction BendingDocument20 pagesInduction BendingAnoop N Kutty100% (4)
- Final Concrete Cutting and Drilling Doc CroppedDocument20 pagesFinal Concrete Cutting and Drilling Doc CroppedEhab SaadNo ratings yet
- Sample Letter of IntentDocument4 pagesSample Letter of IntentKaloyana Georgieva100% (2)
- Saudi Aramco NDT Methods Application On Heat ExchangersDocument30 pagesSaudi Aramco NDT Methods Application On Heat Exchangersaasatti100% (1)
- RSC - in Service Welding On Gas Pipelines - Part 1 - Michael Painter Final Report 01 Jun 2000Document38 pagesRSC - in Service Welding On Gas Pipelines - Part 1 - Michael Painter Final Report 01 Jun 2000rodholfho100% (1)
- A Comprehensive Approach To Reformer Tube InspectionDocument13 pagesA Comprehensive Approach To Reformer Tube InspectionHéctor S. RodríguezNo ratings yet
- Internal Audit Checklist 2008: What To Look For QuestionsDocument14 pagesInternal Audit Checklist 2008: What To Look For QuestionsEhab SaadNo ratings yet
- In-Service Condition Monitoring of Piping Systems in Power Plants Requirements and Advanced TechniquesDocument13 pagesIn-Service Condition Monitoring of Piping Systems in Power Plants Requirements and Advanced Techniquesamirreza_eng3411No ratings yet
- Design Rules For Vacuum ChambersDocument12 pagesDesign Rules For Vacuum ChambersDavid Jimenez GonzalezNo ratings yet
- Un-Piggable Pipeline 1Document9 pagesUn-Piggable Pipeline 1Muhammad NuhNo ratings yet
- Reformer TubeDocument16 pagesReformer TubeAgus Tri Atmanto100% (1)
- Distribution of Fire ExtinguishersDocument28 pagesDistribution of Fire ExtinguishersEhab SaadNo ratings yet
- Lifting Categorisation Flow Chart OnshoreDocument3 pagesLifting Categorisation Flow Chart OnshoreEhab SaadNo ratings yet
- Intsallation of Hot Tap FittingsSAEP0311Document25 pagesIntsallation of Hot Tap FittingsSAEP0311Ehab SaadNo ratings yet
- PPXV An Elegant and Fast Method To Predict The Slow Crack Growth Behaviour of High Density Polyethylene Pipe MaterialsDocument7 pagesPPXV An Elegant and Fast Method To Predict The Slow Crack Growth Behaviour of High Density Polyethylene Pipe MaterialsMehboob ulHaqNo ratings yet
- HSE RegulationDocument274 pagesHSE RegulationEhab SaadNo ratings yet
- Construction of Transmission and Distribution Power LinesDocument0 pagesConstruction of Transmission and Distribution Power LinesEhab SaadNo ratings yet
- Tank Builders ScaffoldDocument40 pagesTank Builders ScaffoldEhab SaadNo ratings yet
- Auto UT PIpe InspectionDocument16 pagesAuto UT PIpe InspectionMohd Azrul AzmanNo ratings yet
- Lifetime Assessment of A Steam Pipeline: 1 2 Material 15 128 (14MOV6-3)Document6 pagesLifetime Assessment of A Steam Pipeline: 1 2 Material 15 128 (14MOV6-3)Costas AggelidisNo ratings yet
- Cold Metal Transfer: A Revolution in Mechanised Root Pass Pipeline WeldingDocument3 pagesCold Metal Transfer: A Revolution in Mechanised Root Pass Pipeline Weldingargentino_ar01No ratings yet
- 2008 Development of A Procedure For The Ultrasonic Examination of Nickel LNG Storage Tank Welds Using Phased Array TechnologyDocument5 pages2008 Development of A Procedure For The Ultrasonic Examination of Nickel LNG Storage Tank Welds Using Phased Array Technologyநந்த குமார் சம்பத் நாகராஜன்No ratings yet
- Bird Accumu, Ation Effect On Helicopter OperationsDocument9 pagesBird Accumu, Ation Effect On Helicopter OperationsEhab SaadNo ratings yet
- Project Standards and Specifications Pipeline Construction Rev01Document15 pagesProject Standards and Specifications Pipeline Construction Rev01hiyeonNo ratings yet
- Through Tubing Casing Break Detection An EM Thickness Tool ApplicationDocument14 pagesThrough Tubing Casing Break Detection An EM Thickness Tool ApplicationGiorgia Pasquetti MariathNo ratings yet
- Testing WeldingDocument7 pagesTesting Weldingwebs.usuarioNo ratings yet
- Dimensional Metrology Aids Pipe Manufacture, InstallationDocument5 pagesDimensional Metrology Aids Pipe Manufacture, InstallationCarlos BustamanteNo ratings yet
- Spot WeldingDocument15 pagesSpot WeldingLívia RodriguesNo ratings yet
- FULLTEXT01Document8 pagesFULLTEXT01balamuruganNo ratings yet
- NDT2012 4B5Document9 pagesNDT2012 4B5hansengNo ratings yet
- Internal Oxide ApplicationDocument8 pagesInternal Oxide ApplicationEduardoNo ratings yet
- Adhesion Testing of Thermally Sprayed and Laser Deposited Coatings 2004 Surface and Coatings TechnologyDocument11 pagesAdhesion Testing of Thermally Sprayed and Laser Deposited Coatings 2004 Surface and Coatings TechnologyMeneer TierNo ratings yet
- Weldolet Inspection at Higher TemperaturesDocument7 pagesWeldolet Inspection at Higher TemperaturesKarna2504No ratings yet
- Luciano Mantovano, Marcos Ponciano, Santiago Serebrinsky, Hugo Ernst, Teresa Pérez, Martin Valdez, Luis ChadDocument10 pagesLuciano Mantovano, Marcos Ponciano, Santiago Serebrinsky, Hugo Ernst, Teresa Pérez, Martin Valdez, Luis ChadMarcelo Varejão CasarinNo ratings yet
- Full Scale Experimental Analysis of Stress States in Sleeve Repairs of Gas Pipelines PDFDocument9 pagesFull Scale Experimental Analysis of Stress States in Sleeve Repairs of Gas Pipelines PDFzemog001100% (1)
- Ultrasonic Testing of Pipeline Girth WeldsDocument4 pagesUltrasonic Testing of Pipeline Girth WeldsManoj Kumar InsulkarNo ratings yet
- A Study of Melting Efficiency in Plasma Arc and Gas Tungsten Arc WeldingDocument12 pagesA Study of Melting Efficiency in Plasma Arc and Gas Tungsten Arc WeldingFayzan AhmedNo ratings yet
- Advanced Modelling and TestingDocument43 pagesAdvanced Modelling and TestingSanjoo PaddeaNo ratings yet
- A Phased Array Ultrasonic Testing of A Manual Thick Austenitic WeldDocument9 pagesA Phased Array Ultrasonic Testing of A Manual Thick Austenitic WeldRamakrishnan AmbiSubbiahNo ratings yet
- A New Approach To Boiler, Pipeline and Turbine Inspections: Bill@steeltest - Co.za, Ezar@steeltest - Co.zaDocument10 pagesA New Approach To Boiler, Pipeline and Turbine Inspections: Bill@steeltest - Co.za, Ezar@steeltest - Co.zaInChy Rencarnation PoseidonNo ratings yet
- NDT and E International: SciencedirectDocument11 pagesNDT and E International: SciencedirectCarlos MartinsNo ratings yet
- Ultrasonic Testing of Welded Joints in Pipelines. New Techniques and InstrumentsDocument4 pagesUltrasonic Testing of Welded Joints in Pipelines. New Techniques and InstrumentsALP69No ratings yet
- How Can You Use Eddy Current NDT For Tube InspectionDocument2 pagesHow Can You Use Eddy Current NDT For Tube InspectionWoodrow FoxNo ratings yet
- Component Repair Using Laser Direct Metal DepositionDocument10 pagesComponent Repair Using Laser Direct Metal DepositionelmiraNo ratings yet
- x80 Line Pipe For Large Diameter High Strength PipelineDocument15 pagesx80 Line Pipe For Large Diameter High Strength PipelineAnonymous AlhzFE9EVNNo ratings yet
- Acoustic Emission TestsDocument8 pagesAcoustic Emission TestsDBasak_1974No ratings yet
- Aiche 38-011Document8 pagesAiche 38-011ejremediosNo ratings yet
- Design of Shell Tube Heat Exchanger Using Vibration AnalysisDocument5 pagesDesign of Shell Tube Heat Exchanger Using Vibration AnalysisIJRASETPublicationsNo ratings yet
- Induction Bends in Material Grade X80Document0 pagesInduction Bends in Material Grade X80Nandhakumaran RajagopalanNo ratings yet
- X100 - Girth Welding, Joint Properties and Defect ToleranceDocument13 pagesX100 - Girth Welding, Joint Properties and Defect ToleranceAlberto ChazarretaNo ratings yet
- RF CableDocument28 pagesRF Cablerahul_2005No ratings yet
- Ipc2012 90242Document8 pagesIpc2012 90242Marcelo Varejão CasarinNo ratings yet
- Strain GaugesDocument7 pagesStrain GaugesRoss Jay MichelNo ratings yet
- Flexible Pipe ThesisDocument6 pagesFlexible Pipe Thesisandrealeehartford100% (2)
- Condition Assessment Study On Stator Bars, After 40 Years of OperationDocument4 pagesCondition Assessment Study On Stator Bars, After 40 Years of Operationnir205No ratings yet
- New Developments in The Inspection of Gas Distribution MainsDocument6 pagesNew Developments in The Inspection of Gas Distribution MainsscrbdgharaviNo ratings yet
- wu2019光纤监测套管变形与水泥完整性Document15 pageswu2019光纤监测套管变形与水泥完整性su feiyuNo ratings yet
- Automated Ultrasonic Testing of Submerged-Arc Welded (SAW) Pipes Using Phased-ArraysDocument8 pagesAutomated Ultrasonic Testing of Submerged-Arc Welded (SAW) Pipes Using Phased-Arrayskumar.phanindraNo ratings yet
- Iec62271307 EngDocument8 pagesIec62271307 EngSergio FeitozaNo ratings yet
- Conduit Sizing - Voltimum UKDocument5 pagesConduit Sizing - Voltimum UKSabri GünaydınNo ratings yet
- 5.david - .Spencer - Air Cooled HE TTSDocument6 pages5.david - .Spencer - Air Cooled HE TTSBaher ElsheikhNo ratings yet
- Developments in Equipment and Standards For Testing Porosity in CoatingsDocument11 pagesDevelopments in Equipment and Standards For Testing Porosity in Coatingsmfazl33No ratings yet
- S690QL - Hemiska Analiza PDFDocument7 pagesS690QL - Hemiska Analiza PDFEmir MujićNo ratings yet
- D 5334 - 92 - Rduzmzqtukve PDFDocument8 pagesD 5334 - 92 - Rduzmzqtukve PDFchabibNo ratings yet
- Hot TapDocument11 pagesHot TapsumanNo ratings yet
- Metrode Duplex Welding EWDDocument7 pagesMetrode Duplex Welding EWDClaudia MmsNo ratings yet
- 10 Elec Standards2Document113 pages10 Elec Standards2limresNo ratings yet
- Signs Signals BarricadesDocument11 pagesSigns Signals BarricadesEhab SaadNo ratings yet
- No 21, Hearing Protection RequirementsDocument1 pageNo 21, Hearing Protection RequirementsEhab SaadNo ratings yet
- Lessons Learnt - Trench CollapseDocument2 pagesLessons Learnt - Trench CollapseEhab SaadNo ratings yet
- Child Care Emergency Response ManualDocument154 pagesChild Care Emergency Response ManualEhab Saad100% (1)
- 02 Part Ii Erection SpecificaitonDocument26 pages02 Part Ii Erection SpecificaitonNana MulyanaNo ratings yet
- Employee Safety Communications ProcedureDocument5 pagesEmployee Safety Communications ProcedureEhab SaadNo ratings yet
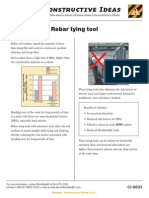
- Rebar Tying ToolDocument0 pagesRebar Tying ToolEhab SaadNo ratings yet
- Ehab Saad Zaki QHSE CVDocument10 pagesEhab Saad Zaki QHSE CVEhab SaadNo ratings yet
- Syllabus For I - Viii Semesters: Department of Electronics and Instrumentation EngineeringDocument188 pagesSyllabus For I - Viii Semesters: Department of Electronics and Instrumentation EngineeringRavindra VankinaNo ratings yet
- Gujarat Technological University: Project EmpathyDocument7 pagesGujarat Technological University: Project EmpathyKaval PatelNo ratings yet
- ACH130 AM Edition BrochureDocument17 pagesACH130 AM Edition BrochuremarcusdeburcaNo ratings yet
- Hotel. How May I Help You?Document2 pagesHotel. How May I Help You?putu kasparinataNo ratings yet
- Time Manegment 4Document2 pagesTime Manegment 4Osman ElmaradnyNo ratings yet
- Case Method 1Document8 pagesCase Method 1Abcid BlancaNo ratings yet
- Agriculture Is Not The Magic Solution - Simon KolawoleDocument3 pagesAgriculture Is Not The Magic Solution - Simon KolawoleIk Einstein OjoganNo ratings yet
- GEPEA EUROPE - About USDocument3 pagesGEPEA EUROPE - About USRejaul AbedinNo ratings yet
- Byron v. Boone and Audray S. Boone v. United States, 470 F.2d 232, 10th Cir. (1972)Document8 pagesByron v. Boone and Audray S. Boone v. United States, 470 F.2d 232, 10th Cir. (1972)Scribd Government DocsNo ratings yet
- Assignment 3 AmazonDocument6 pagesAssignment 3 AmazonSangeeta Bansal0% (2)
- Poyaud HyperbarDocument38 pagesPoyaud Hyperbardieselroarmt875b0% (1)
- IMCDocument45 pagesIMCAsaf RajputNo ratings yet
- JS Quiz MergedDocument25 pagesJS Quiz Mergedabc abcNo ratings yet
- Minutes AircraftSafetySubcom 03242015Document19 pagesMinutes AircraftSafetySubcom 03242015Elmer VillegasNo ratings yet
- Cisco IE 4000 InstallationDocument44 pagesCisco IE 4000 Installationeabrodriguez3116No ratings yet
- မြန်မာ - datastructures&algorithmsDocument114 pagesမြန်မာ - datastructures&algorithmsAlex SnowNo ratings yet
- Back Filling Work Method StatmentDocument2 pagesBack Filling Work Method StatmentAbu NijamNo ratings yet
- Manual NordconDocument228 pagesManual NordconandreNo ratings yet
- 1.2 Nationalized Banks in India: Axis BankDocument4 pages1.2 Nationalized Banks in India: Axis BankUsman KulkarniNo ratings yet
- Custom Car Care: Case Analysis OnDocument4 pagesCustom Car Care: Case Analysis OnSatyabrataNayakNo ratings yet
- Free Movie Streaming Sites: Amazon Prime VideoDocument2 pagesFree Movie Streaming Sites: Amazon Prime VideoZakir AliNo ratings yet
- Repositori Ayu Alnadira AkibDocument10 pagesRepositori Ayu Alnadira AkibAhmadNo ratings yet
- Drilling Cost and Hole ProblemsDocument39 pagesDrilling Cost and Hole ProblemsArun Sharma100% (1)
- Satanic CRAIYON AI READS Various Text Converted To DECIMAL - HEX NCRS and PRODUCES ACCURATE OUTPUT/STEREOTYPESDocument140 pagesSatanic CRAIYON AI READS Various Text Converted To DECIMAL - HEX NCRS and PRODUCES ACCURATE OUTPUT/STEREOTYPESAston WalkerNo ratings yet
- The EarthDocument12 pagesThe EarthKather ShaNo ratings yet
- Metal-Insulator-Metal CapacitorsDocument16 pagesMetal-Insulator-Metal Capacitorspilotvivek1087No ratings yet
- Optimization of Suspension DesignDocument9 pagesOptimization of Suspension Designmult69No ratings yet