You might also like
- HW No 1. February 14, 2017Document3 pagesHW No 1. February 14, 2017khalidNo ratings yet
- Review2Document17 pagesReview2PREETHINo ratings yet
- Electronics Ch8Document35 pagesElectronics Ch8Boudi ChouNo ratings yet
- DSP Lab#05Document6 pagesDSP Lab#05Aayan ShahNo ratings yet
- Department of Electrical & Computer Engineering: North South UniversityDocument8 pagesDepartment of Electrical & Computer Engineering: North South UniversityMD Shariful IslamNo ratings yet
- 01PDFQW Electronic Systems For Mechatronics 01/07/ 2015: Exam RulesDocument3 pages01PDFQW Electronic Systems For Mechatronics 01/07/ 2015: Exam RulesMomo FerraciniNo ratings yet
- Application of Electronics Chapter 2 DigiDocument47 pagesApplication of Electronics Chapter 2 DigiAntony ClarkNo ratings yet
- Determinación de Pérdidas en Circuitos RadialesDocument5 pagesDeterminación de Pérdidas en Circuitos RadialesEdna LópezNo ratings yet
- HW No 2. February 26, 2017Document2 pagesHW No 2. February 26, 2017khalidNo ratings yet
- Lecture 11 - Discrete Time Systems (Slides)Document13 pagesLecture 11 - Discrete Time Systems (Slides)Buddhadev GhoshNo ratings yet
- Engineering Mathematics Semester 2 Assignment 1Document1 pageEngineering Mathematics Semester 2 Assignment 1Benjamin AsiriNo ratings yet
- The Finite Element Method For The Analysis of Non-Linear and Dynamic SystemsDocument32 pagesThe Finite Element Method For The Analysis of Non-Linear and Dynamic SystemsvcKampNo ratings yet
- SC Lab RecordDocument44 pagesSC Lab RecordEdward CullenNo ratings yet
- CPET 190 Problem Solving With MatlabDocument28 pagesCPET 190 Problem Solving With MatlabLayl ZanNo ratings yet
- 59 9 StabilizationDocument9 pages59 9 StabilizationSri HaranNo ratings yet
- MIT Electrical Electronics Open Ware 6.002-3 Handout S07015 Homework Hw2Document3 pagesMIT Electrical Electronics Open Ware 6.002-3 Handout S07015 Homework Hw2John Bofarull GuixNo ratings yet
- University of Asia Pacific: Department of Electrical and Electronic EngineeringDocument5 pagesUniversity of Asia Pacific: Department of Electrical and Electronic EngineeringBijon PalNo ratings yet
- Exam2 Solutions S16Document9 pagesExam2 Solutions S16ghasNo ratings yet
- ELEC334 Lab 5 Fall2018Document6 pagesELEC334 Lab 5 Fall2018EnamulduNo ratings yet
- EAC533LCS - Worksheet - Chapter 1Document11 pagesEAC533LCS - Worksheet - Chapter 1meseret sisayNo ratings yet
- LTI SystemsDocument75 pagesLTI SystemsRoob HoodNo ratings yet
- Assignment BENT 2723-2-1819Document4 pagesAssignment BENT 2723-2-1819amir syafiqNo ratings yet
- ECE 411 Quiz 3Document1 pageECE 411 Quiz 3anthony riegoNo ratings yet
- 6 TransMag Magnetic Design Considerations of Bidirectional InductiveDocument5 pages6 TransMag Magnetic Design Considerations of Bidirectional InductivemarwanNo ratings yet
- Massachusetts Institute of TechnologyDocument12 pagesMassachusetts Institute of TechnologyKarishtain NewtonNo ratings yet
- NANOMETRICAL DEVICES - 3D HI-K and FinFET in Synopsys SentaurusDocument18 pagesNANOMETRICAL DEVICES - 3D HI-K and FinFET in Synopsys SentaurusJuan VALVERDENo ratings yet
- Dynamics of Electromechanical Systems: March 1996Document13 pagesDynamics of Electromechanical Systems: March 1996WendymahesNo ratings yet
- Design of A Magnetic Levitation Control System PDFDocument5 pagesDesign of A Magnetic Levitation Control System PDFEliel Marcos RomanciniNo ratings yet
- Simulation of Line Outage Distribution Factors (L.O.D.F) Calculation For N-Buses SystemDocument7 pagesSimulation of Line Outage Distribution Factors (L.O.D.F) Calculation For N-Buses SystemHemang PatelNo ratings yet
- Page 1 of 3Document3 pagesPage 1 of 3Thivanka RaviharaNo ratings yet
- ECE 476 - Power System Analysis Fall 2017: Homework 7Document1 pageECE 476 - Power System Analysis Fall 2017: Homework 7Babasrinivas GuduruNo ratings yet
- Ss2 Post PracDocument9 pagesSs2 Post PracLenny NdlovuNo ratings yet
- MATLAB Tools For Linear and Nonlinear System Stability Theorem ImplementationDocument7 pagesMATLAB Tools For Linear and Nonlinear System Stability Theorem ImplementationFared O'riordanNo ratings yet
- Acs EndDocument4 pagesAcs EndMalay DharNo ratings yet
- Vietnam National University University of Engineering and TechnologyDocument19 pagesVietnam National University University of Engineering and TechnologyHuy Đức LêNo ratings yet
- Output-Feedback Control of An Underwater Vehicle Prototype by Higher-Order Sliding ModesDocument7 pagesOutput-Feedback Control of An Underwater Vehicle Prototype by Higher-Order Sliding ModesfaridrahmanNo ratings yet
- Information Theory: Figure 2.1 Digital Communication SystemsDocument4 pagesInformation Theory: Figure 2.1 Digital Communication SystemsMustfa AhmedNo ratings yet
- Instructional Module: IM No.5: EE - 1st Semester-2021-2022Document13 pagesInstructional Module: IM No.5: EE - 1st Semester-2021-2022KosjeNo ratings yet
- Design of Battery Charging Control System Fast ChaDocument10 pagesDesign of Battery Charging Control System Fast Chashahidmb9431No ratings yet
- Ee0051 Activity g6Document8 pagesEe0051 Activity g6Seth GarciaNo ratings yet
- MAE 3272 - Lecture 2 Notes - ErrorsDocument18 pagesMAE 3272 - Lecture 2 Notes - ErrorsaoeusnthidNo ratings yet
- LED Driver Circuit Powered by Direct ACDocument6 pagesLED Driver Circuit Powered by Direct ACKibargoi KipsetmetNo ratings yet
- EEET2197 Tute3Document2 pagesEEET2197 Tute3Collin lcwNo ratings yet
- ECEN 214 Lab 7Document7 pagesECEN 214 Lab 7Shoaib AhmedNo ratings yet
- Feedback FinalsDocument1 pageFeedback FinalsKirk Daniel ObregonNo ratings yet
- 12EE2603 - Power Electronics: Department of Electrical and Electronics EngineeringDocument72 pages12EE2603 - Power Electronics: Department of Electrical and Electronics EngineeringMurughesh MurughesanNo ratings yet
- TSPSC AEE 2022 EE Questions-with-Solutions UpdatedDocument56 pagesTSPSC AEE 2022 EE Questions-with-Solutions UpdatedRam prabhathNo ratings yet
- Introduction To State Space Analysis: Lecture Notes by N.Selvaganesan, IIST (January - May 2018)Document43 pagesIntroduction To State Space Analysis: Lecture Notes by N.Selvaganesan, IIST (January - May 2018)sithara sNo ratings yet
- ELEC 6601 Project #1: N N N HDocument1 pageELEC 6601 Project #1: N N N HViral ThakarNo ratings yet
- 15A02301 Electrical Circuits - IIDocument2 pages15A02301 Electrical Circuits - IIvenkat saiNo ratings yet
- Comparative Study of Two Dimensional Boundary Layer Over NACA 23012 and NACA 23021 Airfoils by Using Keller's Box MethodDocument10 pagesComparative Study of Two Dimensional Boundary Layer Over NACA 23012 and NACA 23021 Airfoils by Using Keller's Box MethodSev MischiefNo ratings yet
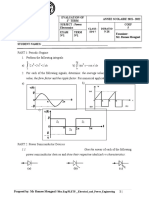
- DX B) X Cos X DX: Class: Eps 7 Duratio N2HDocument2 pagesDX B) X Cos X DX: Class: Eps 7 Duratio N2HRomeo MougnolNo ratings yet
- Mass Spring Damper SystemDocument2 pagesMass Spring Damper SystemDivya Bharathi SNo ratings yet
- Experiment 2 20 - 21Document11 pagesExperiment 2 20 - 21Mohd khalil AkherNo ratings yet
- Voltage Regulator Using LM 317Document9 pagesVoltage Regulator Using LM 317Mehul PatelNo ratings yet
- Control System LabDocument13 pagesControl System LabSatyanandan SivanesanNo ratings yet
- 136 FastDocument10 pages136 Fastbnousaid2014No ratings yet
- Experiment #2: Continuous-Time Signal Representation I. ObjectivesDocument14 pagesExperiment #2: Continuous-Time Signal Representation I. ObjectivesMarvin AtienzaNo ratings yet
- Experiment #2: Continuous-Time Signal Representation I. ObjectivesDocument14 pagesExperiment #2: Continuous-Time Signal Representation I. ObjectivesMarvin AtienzaNo ratings yet
- ARE - 510 - 6 - Programming and LanguagesDocument31 pagesARE - 510 - 6 - Programming and LanguageskhalidNo ratings yet
- Are 510 7 KbesDocument51 pagesAre 510 7 KbeskhalidNo ratings yet
- Software RETScreenDocument45 pagesSoftware RETScreenkhalidNo ratings yet
- Sustainability 13 05878Document15 pagesSustainability 13 05878khalidNo ratings yet
- ARE - 510 - 3 - Specialized ApplicationDocument33 pagesARE - 510 - 3 - Specialized ApplicationkhalidNo ratings yet
- Innovative Energy Islands: Life-Cycle Cost-Benefit Analysis For Battery Energy StorageDocument19 pagesInnovative Energy Islands: Life-Cycle Cost-Benefit Analysis For Battery Energy StoragekhalidNo ratings yet
- Hybrid Energy Storage System For Voltage Stability in A DC Microgrid Using A Modified Control StrategyDocument6 pagesHybrid Energy Storage System For Voltage Stability in A DC Microgrid Using A Modified Control StrategykhalidNo ratings yet
- Fuzzy Logic BasicsDocument19 pagesFuzzy Logic BasicskhalidNo ratings yet
- 2020 Book FundamentalsOfElectricalPowerSDocument554 pages2020 Book FundamentalsOfElectricalPowerSkhalidNo ratings yet
- Sustainability 13 06776 v3Document24 pagesSustainability 13 06776 v3khalidNo ratings yet
- Energy: Qian Lin, Jun Wang, Rui Xiong, Weixiang Shen, Hongwen HeDocument15 pagesEnergy: Qian Lin, Jun Wang, Rui Xiong, Weixiang Shen, Hongwen HekhalidNo ratings yet
- The Value of Interval Meter Data: in Solar PV Project AnalysisDocument11 pagesThe Value of Interval Meter Data: in Solar PV Project AnalysiskhalidNo ratings yet
- King Fahd University of Petroleum & Minerals Electrical Engineering Department EE 520Document1 pageKing Fahd University of Petroleum & Minerals Electrical Engineering Department EE 520khalidNo ratings yet
- 0b Three Phase IOHDocument28 pages0b Three Phase IOHkhalidNo ratings yet
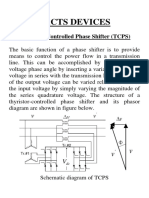
- Facts Devices: 1. Thyristor-Controlled Phase Shifter (TCPS)Document8 pagesFacts Devices: 1. Thyristor-Controlled Phase Shifter (TCPS)khalidNo ratings yet
- Transformer Sizing Using ETAP PDFDocument24 pagesTransformer Sizing Using ETAP PDFkhalidNo ratings yet
- Renewable and Sustainable Energy Reviews: Recent Developments in Microgrids and Example Cases Around The World-A ReviewDocument12 pagesRenewable and Sustainable Energy Reviews: Recent Developments in Microgrids and Example Cases Around The World-A ReviewkhalidNo ratings yet
- EE-520 (171) Dr. Ibrahim O. Habiballah Home Work 2: Use The Chained Data Structure Method For Storing Symmetric YDocument5 pagesEE-520 (171) Dr. Ibrahim O. Habiballah Home Work 2: Use The Chained Data Structure Method For Storing Symmetric YkhalidNo ratings yet
- 01 Components ModelingDocument5 pages01 Components ModelingkhalidNo ratings yet
- EE520 Hw2 171Document1 pageEE520 Hw2 171khalidNo ratings yet
- EE 622 Assignment 5Document1 pageEE 622 Assignment 5khalidNo ratings yet
- Exp 4 Lab ReportDocument30 pagesExp 4 Lab ReportainnorNo ratings yet
- Flywheels May SulatDocument3 pagesFlywheels May SulatRonnieNo ratings yet
- Kyoto UniversityDocument19 pagesKyoto UniversityKhalid EL ABBAOUINo ratings yet
- Chapter 8 Flow in Pipes (Internal Flow)Document74 pagesChapter 8 Flow in Pipes (Internal Flow)moataz100% (1)
- Factors Affecting GPE and KE FinalDocument1 pageFactors Affecting GPE and KE FinalAzanNo ratings yet
- Completion 8Document57 pagesCompletion 8Arvin AbbaspourNo ratings yet
- hw7 ch8Document8 pageshw7 ch8faisalphyNo ratings yet
- Part 3 Energy, Head and Bernoulli's EquationDocument5 pagesPart 3 Energy, Head and Bernoulli's EquationJoren HuernoNo ratings yet
- Numerical Simulations of Complex Flows IDocument16 pagesNumerical Simulations of Complex Flows IPedro LeyvaNo ratings yet
- Class IV - Forced Convection - External Flow - Flat Plate - Formulae & ProblemsDocument16 pagesClass IV - Forced Convection - External Flow - Flat Plate - Formulae & ProblemsSai Ashok Kumar Reddy100% (2)
- Aero SemDocument182 pagesAero SemNaveen Singh100% (1)
- Efficiency of A Front Wing On A FSAE Car Tarass GorevoiDocument55 pagesEfficiency of A Front Wing On A FSAE Car Tarass GorevoiDavid Dominguez100% (1)
- 07 Fluid MechanicsDocument28 pages07 Fluid MechanicsJoyce CulloNo ratings yet
- Flapping Wings - OrnithopterDocument9 pagesFlapping Wings - Ornithopterleelavathy100% (1)
- Blasius PDFDocument2 pagesBlasius PDFckhaled3No ratings yet
- Water 11 02511 v2Document18 pagesWater 11 02511 v2Andrzej BąkałaNo ratings yet
- Aerodynamics Related To ChassisDocument23 pagesAerodynamics Related To ChassisAmal MechanicNo ratings yet
- 4 Compressible Fluid Dynamics: &RQWHQWVDocument23 pages4 Compressible Fluid Dynamics: &RQWHQWVVIVEK JOSHINo ratings yet
- Random Qs+AsDocument13 pagesRandom Qs+AsdsofewnNo ratings yet
- K FactorDocument5 pagesK Factorgita100% (1)
- Pump & Pump Piping PresentationDocument55 pagesPump & Pump Piping PresentationEduard Gonzalo Rojas Cervantes100% (1)
- Pitfalls of Pump PipingDocument3 pagesPitfalls of Pump PipingChris PeramunugamaNo ratings yet
- Week 8Document65 pagesWeek 8sunil kumar sahNo ratings yet
- The Ramp PhET LabDocument2 pagesThe Ramp PhET Labgiaulea_victor0% (1)
- Easa Propellers QuestionsDocument8 pagesEasa Propellers QuestionsHongshuangLee0% (1)
- Model Kaplan Turbine BladeDocument26 pagesModel Kaplan Turbine Bladefl1609100% (1)
- (WWW - Entrance-Exam - Net) - Gujarat Technological University ME 1st Sem - Advanced Fluid Mechanics Sample Paper 5Document2 pages(WWW - Entrance-Exam - Net) - Gujarat Technological University ME 1st Sem - Advanced Fluid Mechanics Sample Paper 5Anas ElshabliNo ratings yet
- Razi Seminar Final PresentationDocument25 pagesRazi Seminar Final Presentationsidharth7manojNo ratings yet
- Theory of Vibrations - Saran - Soil Dynamics and Machine FoundationDocument52 pagesTheory of Vibrations - Saran - Soil Dynamics and Machine Foundationshivabtowin3301100% (1)
- Wave Forces On Vertical CylinderDocument22 pagesWave Forces On Vertical CylinderInayatul LailiyahNo ratings yet