You might also like
- YEAR PLAN AB INITIO - Course DesignDocument11 pagesYEAR PLAN AB INITIO - Course DesignSudeepa Nuthulapaty89% (18)
- Introduction To Wireless Systems - P M Shankar - Solutions Manual PDFDocument246 pagesIntroduction To Wireless Systems - P M Shankar - Solutions Manual PDFmienimeez94% (17)
- MSE208 ExercisesDocument31 pagesMSE208 ExercisesJenna MarshNo ratings yet
- 2016 MPI Bremner and Lane - Measuring Snapper From Video Footage - A Forensic PerspectiveDocument27 pages2016 MPI Bremner and Lane - Measuring Snapper From Video Footage - A Forensic PerspectiveNewshubNo ratings yet
- Low Pass Filter Matlab ProgramingDocument3 pagesLow Pass Filter Matlab ProgramingDebobrataNo ratings yet
- Factsheet 5 - Eye Accessing Cues PDFDocument2 pagesFactsheet 5 - Eye Accessing Cues PDFVisesh100% (1)
- SAE Technical Paper FormatDocument3 pagesSAE Technical Paper FormatJai DevmaneNo ratings yet
- Greek 4 StudentDocument8 pagesGreek 4 Studentapi-222142576No ratings yet
- Matlab CodeDocument3 pagesMatlab CodeBhavish ParkalaNo ratings yet
- MATLAB Introduction SlidesDocument101 pagesMATLAB Introduction SlidescustomerxNo ratings yet
- LeastSquares Fit in MatlabDocument64 pagesLeastSquares Fit in MatlabJohn GkanatsiosNo ratings yet
- DSP Filter BankDocument6 pagesDSP Filter BankTabish AliNo ratings yet
- Target Tracking Using KalmanDocument13 pagesTarget Tracking Using KalmanAmit Kumar Karna100% (8)
- Period Tracking Using Autocorrelation - DadorranDocument7 pagesPeriod Tracking Using Autocorrelation - DadorranGustavo Trigueiros IINo ratings yet
- Código em MATLAB 6Document4 pagesCódigo em MATLAB 6SOST HUMAPNo ratings yet
- Markimoo Comapps PrintDocument9 pagesMarkimoo Comapps PrintMark Danielle BahintingNo ratings yet
- Pulse Code ModulationDocument16 pagesPulse Code ModulationKissi MissiNo ratings yet
- Appendices: Appendix A: Complete BEM CodeDocument12 pagesAppendices: Appendix A: Complete BEM CodeJohn KerryNo ratings yet
- All CodesDocument8 pagesAll Codesa7med.3mvrNo ratings yet
- LDPC Hardcoding Bec 52Document8 pagesLDPC Hardcoding Bec 52Heman ChauhanNo ratings yet
- 1/22/13 11:58 AM C:/Users/Solo... /uwb - SV - Eval - CT - 15 - 4a.m 1 of 4Document4 pages1/22/13 11:58 AM C:/Users/Solo... /uwb - SV - Eval - CT - 15 - 4a.m 1 of 4Solo NunooNo ratings yet
- ROB521 Assignment 3 PDFDocument7 pagesROB521 Assignment 3 PDF11 1No ratings yet
- M.E CS-1 Lab ManualDocument78 pagesM.E CS-1 Lab Manualselvaece2010No ratings yet
- TEL 432 E: Digital Image ProcessingDocument22 pagesTEL 432 E: Digital Image ProcessingDeep ManNo ratings yet
- Assignment No: 1 Statement: Write Down The Matlab Program For Falling Parachutist CaseDocument7 pagesAssignment No: 1 Statement: Write Down The Matlab Program For Falling Parachutist CaseAshutosh KattiNo ratings yet
- Código em MATLAB 2Document8 pagesCódigo em MATLAB 2SOST HUMAPNo ratings yet
- ROB521 Assignment 3Document7 pagesROB521 Assignment 311 1No ratings yet
- Matlab Code of Image CompressionDocument5 pagesMatlab Code of Image CompressionRohit Xavier0% (1)
- Face DetectionDocument7 pagesFace DetectionJeremy KipgenNo ratings yet
- MatlabcodesDocument26 pagesMatlabcodesjose mirandaNo ratings yet
- Digital Modulation and DemodulationDocument11 pagesDigital Modulation and DemodulationpoornimaNo ratings yet
- Código em MATLAB 4Document4 pagesCódigo em MATLAB 4SOST HUMAPNo ratings yet
- Matlab CodesDocument12 pagesMatlab CodeshazoorbukhshNo ratings yet
- ImplementationDocument14 pagesImplementationTamilSelvanNo ratings yet
- Experiment No: 13 Transient and Steady State Response AnalysisDocument28 pagesExperiment No: 13 Transient and Steady State Response Analysisayesha amjadNo ratings yet
- Appendix - III: MATLAB Program For Examples of Chapter 5 Example 5.1 (Case 1), Single Support ExcitationDocument7 pagesAppendix - III: MATLAB Program For Examples of Chapter 5 Example 5.1 (Case 1), Single Support ExcitationAkshay NaikNo ratings yet
- Código em MATLAB 4Document6 pagesCódigo em MATLAB 4SOST HUMAPNo ratings yet
- Matlab Code:: All AllDocument5 pagesMatlab Code:: All AllnoybitNo ratings yet
- % BPSKDocument10 pages% BPSKMajd ShakhatrehNo ratings yet
- Full Text 21Document9 pagesFull Text 21SatishReddyNo ratings yet
- CodeDocument5 pagesCodeAbhay SharmaNo ratings yet
- MATLAB Source Codes Otsu Thresholding Method: All 'Angiogram1 - Gray - JPG'Document10 pagesMATLAB Source Codes Otsu Thresholding Method: All 'Angiogram1 - Gray - JPG'Mohammed AlmalkiNo ratings yet
- All All: %PROBLEM 2.1Document10 pagesAll All: %PROBLEM 2.1Ravindranath ShrivastavaNo ratings yet
- Filtrare Un SegnaleDocument35 pagesFiltrare Un SegnaleMatteo PicanoNo ratings yet
- Código em MATLAB 1Document8 pagesCódigo em MATLAB 1SOST HUMAPNo ratings yet
- Rakshk Acs LabDocument18 pagesRakshk Acs LabRakesh AseryNo ratings yet
- AudioDocument2 pagesAudiowalikarim73No ratings yet
- Assignment No: 1: Statement: Write Down The Matlab Program For Falling Parachutist CaseDocument3 pagesAssignment No: 1: Statement: Write Down The Matlab Program For Falling Parachutist CaseAkshay WalimbeNo ratings yet
- Código em MATLAB 5Document6 pagesCódigo em MATLAB 5SOST HUMAPNo ratings yet
- CS Exp 8Document7 pagesCS Exp 8Anirudh MittalNo ratings yet
- Delta and Adaptive Delta ModulationDocument6 pagesDelta and Adaptive Delta Modulationabc abcNo ratings yet
- For For If Else EndDocument3 pagesFor For If Else EndhikolNo ratings yet
- Noisympc MDocument4 pagesNoisympc Mjiugarte1No ratings yet
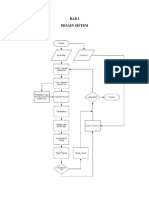
- Bab I Desain Sistem: 1.1 Blok DiagramDocument4 pagesBab I Desain Sistem: 1.1 Blok DiagramRini Apriyanti PurbaNo ratings yet
- Thong-Tin-Vo-Tuyen - Ofdm-Code - (Cuuduongthancong - Com)Document10 pagesThong-Tin-Vo-Tuyen - Ofdm-Code - (Cuuduongthancong - Com)Toàn - K2 Nguyễn VănNo ratings yet
- ME End Sem ProgramsDocument8 pagesME End Sem ProgramsThirumal ValavanNo ratings yet
- Listing Code Voice RecognitionDocument11 pagesListing Code Voice RecognitionRivanto ParungNo ratings yet
- Object Follower CodeDocument3 pagesObject Follower Codes2sarathNo ratings yet
- Kilian 2009 CodeDocument25 pagesKilian 2009 CodeJongkol NaenonNo ratings yet
- Digitalcom Lab Manual NewDocument26 pagesDigitalcom Lab Manual NewAkanksha DixitNo ratings yet
- % Program Dragforce % Se Hyung Oh Adapted From Professor Farenthold's Notes % Input Paramaters%Document6 pages% Program Dragforce % Se Hyung Oh Adapted From Professor Farenthold's Notes % Input Paramaters%COOL GUYNo ratings yet
- DCOM CodesDocument7 pagesDCOM Codes28Ankit PandeyFEEXTCNo ratings yet
- Ans Problem 1: Matlab CodeDocument11 pagesAns Problem 1: Matlab CodeUmer QureshiNo ratings yet
- Mean Square Error Estimation of A Signal: Part B: Matlab or Labview ExperimentsDocument5 pagesMean Square Error Estimation of A Signal: Part B: Matlab or Labview ExperimentsJUVERIA N ZNo ratings yet
- 21uec094 DL Exp4Document11 pages21uec094 DL Exp4laddha.vedant1No ratings yet
- DSP Lab ManualDocument51 pagesDSP Lab ManualShahin4220No ratings yet
- 4G KPI-WS RSLTE-LNBTS-2-hour-PM 15245-2020 11 02-14 41 23 161Document616 pages4G KPI-WS RSLTE-LNBTS-2-hour-PM 15245-2020 11 02-14 41 23 161Nguyen Quoc DoanNo ratings yet
- 4G Template KPIDocument295 pages4G Template KPINguyen Quoc DoanNo ratings yet
- Badcell 3G NSN 02 11Document4,281 pagesBadcell 3G NSN 02 11Nguyen Quoc DoanNo ratings yet
- Period Start Time WS: Cell Avail Total E-UTRAN RRC Conn STP SR E-Utran E-Rab STP SRDocument223 pagesPeriod Start Time WS: Cell Avail Total E-UTRAN RRC Conn STP SR E-Utran E-Rab STP SRNguyen Quoc DoanNo ratings yet
- 4G KPI province-WS RSLTE-LNBTS-2-hour-PM 21241-2020 12 09-08 25 49 622Document237 pages4G KPI province-WS RSLTE-LNBTS-2-hour-PM 21241-2020 12 09-08 25 49 622Nguyen Quoc DoanNo ratings yet
- 3G KPI-RSRAN-RNC-day-PM 21862-2020 11 23-16 23 55 135Document60 pages3G KPI-RSRAN-RNC-day-PM 21862-2020 11 23-16 23 55 135Nguyen Quoc DoanNo ratings yet
- Period Start Time WS: RRC Setup Success Rate eRAB Setup Success Rate (All Services)Document75 pagesPeriod Start Time WS: RRC Setup Success Rate eRAB Setup Success Rate (All Services)Nguyen Quoc DoanNo ratings yet
- 4G KPI-WS RSLTE-LNBTS-2-hour-PM 15245-2020 11 03-13 48 52 148Document156 pages4G KPI-WS RSLTE-LNBTS-2-hour-PM 15245-2020 11 03-13 48 52 148Nguyen Quoc DoanNo ratings yet
- Export LNBTS 26feb1623Document2,763 pagesExport LNBTS 26feb1623Nguyen Quoc DoanNo ratings yet
- RSRAN135 - WBTS Usage overview-RSRAN-WBTS-day-rsran WCDMA17 Reports RSRAN135 xml-2019 09 03-10 07 23 259Document106 pagesRSRAN135 - WBTS Usage overview-RSRAN-WBTS-day-rsran WCDMA17 Reports RSRAN135 xml-2019 09 03-10 07 23 259Nguyen Quoc DoanNo ratings yet
- 3G KPI-RSRAN-WCEL-whole period-PM 21242-2021 01 20-08 52 48 490Document484 pages3G KPI-RSRAN-WCEL-whole period-PM 21242-2021 01 20-08 52 48 490Nguyen Quoc DoanNo ratings yet
- RSLTE037 - Service Retainability-PLMN-day-rslte LTE19 Reports RSLTE037 xml-2021 02 26-15 53 33 168Document118 pagesRSLTE037 - Service Retainability-PLMN-day-rslte LTE19 Reports RSLTE037 xml-2021 02 26-15 53 33 168Nguyen Quoc DoanNo ratings yet
- QoS DGI KTM v1.3Document59 pagesQoS DGI KTM v1.3Nguyen Quoc DoanNo ratings yet
- RSRAN046 - SHO Adjacencies-CELLPAIR-whole Period-Rsran WCDMA17 SQL Reports RSRAN046 xml-2019 09 06-15 08 24 560Document10 pagesRSRAN046 - SHO Adjacencies-CELLPAIR-whole Period-Rsran WCDMA17 SQL Reports RSRAN046 xml-2019 09 06-15 08 24 560Nguyen Quoc DoanNo ratings yet
- Export MultiTable 26feb1621Document701 pagesExport MultiTable 26feb1621Nguyen Quoc DoanNo ratings yet
- Etilt 108 Site DLK 03112019Document10 pagesEtilt 108 Site DLK 03112019Nguyen Quoc DoanNo ratings yet
- RSRAN045 - ISHO Adjacencies-CELLPAIR-whole Period-Rsran WCDMA17 SQL Reports RSRAN045 xml-2019 09 06-14 45 14 72Document14 pagesRSRAN045 - ISHO Adjacencies-CELLPAIR-whole Period-Rsran WCDMA17 SQL Reports RSRAN045 xml-2019 09 06-14 45 14 72Nguyen Quoc DoanNo ratings yet
- RSRAN001 - System Program - Cell Level-RSRAN-WCEL-hour-rsran WCDMA17 Reports RSRAN001 XML-2019 06-27-16!42!30 986Document203 pagesRSRAN001 - System Program - Cell Level-RSRAN-WCEL-hour-rsran WCDMA17 Reports RSRAN001 XML-2019 06-27-16!42!30 986Nguyen Quoc DoanNo ratings yet
- Active g900nsn-Kv3 v2Document107 pagesActive g900nsn-Kv3 v2Nguyen Quoc DoanNo ratings yet
- (Net) 3g CDD Swapdlk v1.8Document44 pages(Net) 3g CDD Swapdlk v1.8Nguyen Quoc DoanNo ratings yet
- 3G Tay Nguyen Check-RSRAN-WCEL-day-PM 16923-2019 08 19-14 33 53 345Document320 pages3G Tay Nguyen Check-RSRAN-WCEL-day-PM 16923-2019 08 19-14 33 53 345Nguyen Quoc DoanNo ratings yet
- Define KPIDocument33 pagesDefine KPImeohung12886No ratings yet
- Poezii de Primavara in EnglezaDocument10 pagesPoezii de Primavara in EnglezaButunoi MariaNo ratings yet
- A Smart Pill Box With Remind and Consumption Using IOT PDFDocument3 pagesA Smart Pill Box With Remind and Consumption Using IOT PDFGirija KvNo ratings yet
- Negation - Sigmund FreudDocument3 pagesNegation - Sigmund FreudAndrea Denisse Castillo GonzálezNo ratings yet
- Hermans Dialogical Self in Culture Psychology PDFDocument40 pagesHermans Dialogical Self in Culture Psychology PDFPaulaNo ratings yet
- 30 bt Mức độ thông hiểu - phần 1Document7 pages30 bt Mức độ thông hiểu - phần 1thesmallshineNo ratings yet
- Abraham Hicks - Tapescript 4Document6 pagesAbraham Hicks - Tapescript 4naconi011No ratings yet
- White Rose Oilfield Development ApplicationDocument40 pagesWhite Rose Oilfield Development ApplicationRoss WaringNo ratings yet
- High Quality Modal Testing MethodsDocument272 pagesHigh Quality Modal Testing MethodsAhmet MehmetNo ratings yet
- Lansing City Council Info Packet For March 29, 2010 MeetingDocument220 pagesLansing City Council Info Packet For March 29, 2010 MeetingwesthorpNo ratings yet
- Inception & Evolutionary RequirementsDocument14 pagesInception & Evolutionary RequirementsMubasher ShahzadNo ratings yet
- Fourier Synthesis of Ocean Scenes 87 PDFDocument8 pagesFourier Synthesis of Ocean Scenes 87 PDFavinashNo ratings yet
- Set TheoryDocument25 pagesSet TheoryPurushothama ReddyNo ratings yet
- Non Verbal CommunicationDocument8 pagesNon Verbal Communicationmanoj2345No ratings yet
- Next Suite Grid For DelphiDocument30 pagesNext Suite Grid For DelphiWasis PrionggoNo ratings yet
- Hmu Icc-Es Esr-3878Document10 pagesHmu Icc-Es Esr-3878Koresh KhalpariNo ratings yet
- Sinker 114Document19 pagesSinker 114alimisaghian62No ratings yet
- Bata India Limited - CCDocument123 pagesBata India Limited - CCKiran BardeNo ratings yet
- Police Test Preparation Book1Document64 pagesPolice Test Preparation Book1OlgaNo ratings yet
- MEPC.157 (55) Discharge RateDocument3 pagesMEPC.157 (55) Discharge Ratech3g44No ratings yet
- Resume Sri KasojuDocument7 pagesResume Sri KasojuRavi SusmithNo ratings yet
- PSM I™ Preparation Quiz - Real Mode - Mikhail LapshinDocument20 pagesPSM I™ Preparation Quiz - Real Mode - Mikhail LapshinAnonymous 1W5TbG100% (1)
- Double Integral PDFDocument4 pagesDouble Integral PDFDanny BakaniNo ratings yet
- BTEUP Exam Dates/ Schedule 2015Document175 pagesBTEUP Exam Dates/ Schedule 2015MruthyunjayNo ratings yet
- Practice Problems For Test 2Document7 pagesPractice Problems For Test 2Islam Abd AlazizNo ratings yet