You might also like
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- Sensors and ActuatorsDocument62 pagesSensors and ActuatorsPriyanshu NainNo ratings yet
- CH 1 MechatronicsDocument26 pagesCH 1 MechatronicsdanielNo ratings yet
- Hardware Components For Automation and Process ControlDocument40 pagesHardware Components For Automation and Process ControlMuhammad MaazNo ratings yet
- DC Motors: Motor (ECM or EC Motor) and Synchronous DC Motors, AreDocument21 pagesDC Motors: Motor (ECM or EC Motor) and Synchronous DC Motors, AreAhmed SayedNo ratings yet
- Robotics and Mechatronics (RAM) Laboratory: Mechatronics Is The Blending ofDocument25 pagesRobotics and Mechatronics (RAM) Laboratory: Mechatronics Is The Blending ofIvan AvramovNo ratings yet
- 3 SensorsActuatorsDocument34 pages3 SensorsActuatorsBorja Golvano MarotoNo ratings yet
- Chapter One InstruDocument17 pagesChapter One Instrubahiru meleseNo ratings yet
- Mechatronics Regular NotesDocument194 pagesMechatronics Regular NotesJustine Rain D QuerijeroNo ratings yet
- Unit - 3 Iot and ApplicationsDocument23 pagesUnit - 3 Iot and Applicationssaidinesh.garudaNo ratings yet
- Lecture-2 Sensors and ActuatorsDocument39 pagesLecture-2 Sensors and ActuatorsDeepak TendolkarNo ratings yet
- Introductiontosensorstransducers 140830045447 Phpapp02Document17 pagesIntroductiontosensorstransducers 140830045447 Phpapp02Karim NazefNo ratings yet
- Intro To MechatronicsDocument42 pagesIntro To MechatronicsSandeep Kumar GuptaNo ratings yet
- REAL TIME AssignmentDocument14 pagesREAL TIME Assignmentabebaw ataleleNo ratings yet
- Name M.Imran Baig REG EE083050 Section 4 Subject Control System Lab Report 4 Submitted To Sir SohailDocument4 pagesName M.Imran Baig REG EE083050 Section 4 Subject Control System Lab Report 4 Submitted To Sir SohailMuhammad Imran BaigNo ratings yet
- Sensors and Data Acquisition: Radar GunDocument91 pagesSensors and Data Acquisition: Radar GunBurak Bildirici100% (1)
- Dar Es Salaam Institute of Technology: Lecture Notes Transducer As Input Element To The Instrumentation SystemDocument16 pagesDar Es Salaam Institute of Technology: Lecture Notes Transducer As Input Element To The Instrumentation SystemLihakangaR100% (1)
- Sensor Group 8Document12 pagesSensor Group 8A-16 Sanket GhadageNo ratings yet
- Measurement & Instrumentation BMM3532: Accelerometer'Document4 pagesMeasurement & Instrumentation BMM3532: Accelerometer'Mohd NasirNo ratings yet
- Project PresentationDocument14 pagesProject Presentationmohd20988No ratings yet
- S 1Document19 pagesS 1Naveen KumarNo ratings yet
- Sensors and Transducers: Mechatronics - Unit 1, Chapter 2Document41 pagesSensors and Transducers: Mechatronics - Unit 1, Chapter 2Vinay KNo ratings yet
- Process Control Lab ManualDocument338 pagesProcess Control Lab ManualMichael Edwards75% (4)
- Inst CNTRLDocument214 pagesInst CNTRLsohaib_86No ratings yet
- Advanced Electronic ComponentsDocument17 pagesAdvanced Electronic Componentsprem_chandranNo ratings yet
- Experiment - 1: OBJECTIVE - Study and Demonstration of Mechatronic System and ItsDocument8 pagesExperiment - 1: OBJECTIVE - Study and Demonstration of Mechatronic System and ItshiteshNo ratings yet
- Describe Different Types of AccelerometersDocument7 pagesDescribe Different Types of AccelerometersRotin PierreNo ratings yet
- MechatronicsDocument26 pagesMechatronicsGlen Peter Miranda100% (2)
- EEE 432 Measurement and Instrumentation: Sensor TechnologiesDocument23 pagesEEE 432 Measurement and Instrumentation: Sensor Technologiesshivashankar hiremathNo ratings yet
- Two Marks Questions - Doc-MechatronicsDocument12 pagesTwo Marks Questions - Doc-MechatronicsNagammaieie88% (8)
- Face Lock SensorDocument11 pagesFace Lock SensorSadia Tasneem NishatNo ratings yet
- Sensors IntroductionDocument25 pagesSensors IntroductionrR2CcNo ratings yet
- 00 Micromechatronic SystemsDocument47 pages00 Micromechatronic SystemscacaNo ratings yet
- Ultrasonic Motor: Presented By: Sarbesh Bhattacherjee Mine Electrical Engineering IIT (ISM) DhanbadDocument15 pagesUltrasonic Motor: Presented By: Sarbesh Bhattacherjee Mine Electrical Engineering IIT (ISM) DhanbadArnab BhuiyaNo ratings yet
- Sensors and Actuators 1Document37 pagesSensors and Actuators 1Ansh PanchalNo ratings yet
- Sensors and ActuatorsDocument29 pagesSensors and ActuatorstimothydpaulNo ratings yet
- Basics RoboticsDocument10 pagesBasics Roboticsrohit mittalNo ratings yet
- 2022-02 Sensors Engineering - Chapter 1 강의용 - Aerospace Sensor P1장 - 학생용Document124 pages2022-02 Sensors Engineering - Chapter 1 강의용 - Aerospace Sensor P1장 - 학생용0kim chanNo ratings yet
- Q1: Explain Sensor and Actuator in Detail. Ans: - SensorsDocument31 pagesQ1: Explain Sensor and Actuator in Detail. Ans: - SensorsParimal DeshmukhNo ratings yet
- EEE 3210 Final Project ReportDocument19 pagesEEE 3210 Final Project ReportDerrick ThamNo ratings yet
- Assignment With AnswersDocument19 pagesAssignment With AnswersMythily VedhagiriNo ratings yet
- Electrical Measurement and Instrumentation: Sensor TechnologiesDocument23 pagesElectrical Measurement and Instrumentation: Sensor TechnologiesSamuel AdamuNo ratings yet
- Sensor and TransducerDocument54 pagesSensor and TransducerMayur SurbhalaviNo ratings yet
- Ultrasonic RadarDocument6 pagesUltrasonic Radarricky100% (3)
- FALLSEM2022-23 MEE1030 ETH VL2022230100648 REFERENCE MATERIAL Unit-IDocument37 pagesFALLSEM2022-23 MEE1030 ETH VL2022230100648 REFERENCE MATERIAL Unit-IYashNo ratings yet
- Non Contact Sensor PDFDocument24 pagesNon Contact Sensor PDFGaurav R AgrawalNo ratings yet
- Lecture03 Sensors and Its ApplicationsDocument35 pagesLecture03 Sensors and Its Applicationsladybuzz89No ratings yet
- Ch6 Sensors and ActuatorsDocument40 pagesCh6 Sensors and ActuatorsAuto VeteranNo ratings yet
- Slides Lupu 2Document121 pagesSlides Lupu 2Jelena OreljNo ratings yet
- Microactuator 1Document21 pagesMicroactuator 1Anonymous P85UrA0FATNo ratings yet
- 262 15ME753 Mechatronics and Microprocessor (10me65) PDFDocument69 pages262 15ME753 Mechatronics and Microprocessor (10me65) PDFthayu manavan100% (1)
- Rac Module 1Document118 pagesRac Module 1Zaheer AhamedNo ratings yet
- Introduction To MechatronicsDocument150 pagesIntroduction To MechatronicsAdebola oluwadamilare prosperNo ratings yet
- Sensor: 1.proximity SensingDocument4 pagesSensor: 1.proximity SensingMarvick Abuy MilarpezNo ratings yet
- Unit III NotesDocument14 pagesUnit III NotesVijay JaiNo ratings yet
- Lecture 0&1 Introduction SensorsDocument34 pagesLecture 0&1 Introduction Sensorstruongcbl12toanNo ratings yet
- Sensors AND Machine VisionDocument78 pagesSensors AND Machine VisionbabuNo ratings yet
- Sensors and TransducersDocument36 pagesSensors and TransducersPavitra AjagolNo ratings yet
- Mech LecDocument19 pagesMech Lecفضائح لا تصدقNo ratings yet
- 7-Sensors in Robotics-04-05-2023Document96 pages7-Sensors in Robotics-04-05-2023Vanya NandwaniNo ratings yet
- DPWH Do 39Document10 pagesDPWH Do 39Ramil DemabogteNo ratings yet
- Safety Program TrainingDocument4 pagesSafety Program TrainingRamil DemabogteNo ratings yet
- Announcement For Early Cut OffDocument1 pageAnnouncement For Early Cut OffRamil DemabogteNo ratings yet
- Call Center Interview Questions and AnswerDocument13 pagesCall Center Interview Questions and AnswerRamil Demabogte100% (2)
- Pocophone F1 (64GB) : ScreenDocument2 pagesPocophone F1 (64GB) : ScreenRamil DemabogteNo ratings yet
- Organization and Management (ABM) : (Drop Down)Document3 pagesOrganization and Management (ABM) : (Drop Down)Ramil DemabogteNo ratings yet
- MKTG 1 (Principles of Marketing)Document6 pagesMKTG 1 (Principles of Marketing)Ramil DemabogteNo ratings yet
- Food CompaniesDocument1 pageFood CompaniesRamil DemabogteNo ratings yet
- DLL Math 8Document10 pagesDLL Math 8Ramil DemabogteNo ratings yet
- Art Club MinutesDocument1 pageArt Club MinutesRamil DemabogteNo ratings yet
- Name: - Date: - Teacher: Mr. Jonas F. Pascua Parent's SignatureDocument1 pageName: - Date: - Teacher: Mr. Jonas F. Pascua Parent's SignatureRamil DemabogteNo ratings yet
- Administrative Assistant ROLE DESCRIPTIONDocument2 pagesAdministrative Assistant ROLE DESCRIPTIONRamil DemabogteNo ratings yet
- CalendarDocument3 pagesCalendarRamil DemabogteNo ratings yet
- Jobsprofile Outsourcing Services: Department Marketing Date April 27, 2017Document6 pagesJobsprofile Outsourcing Services: Department Marketing Date April 27, 2017Ramil DemabogteNo ratings yet
- Technology and Livelihood Education: Quarter 3 - Module 1 - Week 1Document14 pagesTechnology and Livelihood Education: Quarter 3 - Module 1 - Week 1SITTIE ASIA MINALANG100% (1)
- Hi-7 and Hi-8 Race Ignition Systems: Battery ConsiderationsDocument8 pagesHi-7 and Hi-8 Race Ignition Systems: Battery ConsiderationssphinxxxxNo ratings yet
- BETA Protecting: Miniature Circuit BreakersDocument1 pageBETA Protecting: Miniature Circuit BreakersWalter CataldoNo ratings yet
- Hossley Lighting Power Solutions LinecardDocument1 pageHossley Lighting Power Solutions LinecardjackNo ratings yet
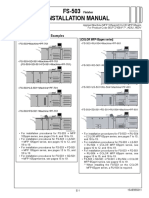
- Installation Manual FS-503: I. Machine Combination ExamplesDocument19 pagesInstallation Manual FS-503: I. Machine Combination ExamplesAlexNo ratings yet
- Gl100e Installation ManualDocument1 pageGl100e Installation ManualJohn WilliamNo ratings yet
- 45 KW, 4 Pole 250M Frame 97 GD2 Starting TimeDocument1 page45 KW, 4 Pole 250M Frame 97 GD2 Starting TimeJeyaram SrinivasanNo ratings yet
- Nowy Styl - Furniture CatalogueDocument116 pagesNowy Styl - Furniture CataloguesuhaamuhammadNo ratings yet
- Daewoo Service Manual Tail Lamp MatizDocument12 pagesDaewoo Service Manual Tail Lamp Matizjulio797No ratings yet
- Method Statement - Earthing & Lightning ProtectionDocument6 pagesMethod Statement - Earthing & Lightning ProtectionKhaled Badawy0% (1)
- Unit 3Document13 pagesUnit 3Nancy TessNo ratings yet
- Ignition System: Tech A Tech BDocument8 pagesIgnition System: Tech A Tech BHiếuNo ratings yet
- Dwnload Full Structural Steel Design A Practice Oriented Approach 2nd Edition Aghayere Solutions Manual PDFDocument36 pagesDwnload Full Structural Steel Design A Practice Oriented Approach 2nd Edition Aghayere Solutions Manual PDFpauljohnsonirkczwoeym100% (9)
- Spec. Server Room & TCR PDFDocument4 pagesSpec. Server Room & TCR PDFSun WuKongNo ratings yet
- ECM PINOUT Chevrolet Sail PDFDocument2 pagesECM PINOUT Chevrolet Sail PDFmanual100% (4)
- Threads and BoltsDocument37 pagesThreads and BoltsTonyNo ratings yet
- Cable RepairDocument56 pagesCable RepairPeteng Project100% (1)
- Part Stock KBBDocument34 pagesPart Stock KBBAwalin sakhi zailani AwalinNo ratings yet
- Feel The Difference Fordgalaxy Fords-Max Owner'S HandbookDocument312 pagesFeel The Difference Fordgalaxy Fords-Max Owner'S Handbooksamasca_serbanNo ratings yet
- Cub Cadet Parts Manual For Model 1620Document7 pagesCub Cadet Parts Manual For Model 1620lucile100% (58)
- MDKBL BM BN Parts ManualDocument144 pagesMDKBL BM BN Parts ManualAhung100% (1)
- Line CurrentsDocument3 pagesLine Currentsdabs_orangejuiceNo ratings yet
- Dynamo PartsDocument25 pagesDynamo Partsdustinguzman17100% (1)
- Obstivision: Maintenance Free Led Obstacle LightDocument6 pagesObstivision: Maintenance Free Led Obstacle LightPoelmp PakpahanNo ratings yet
- ARTECHE FY Auxiliary-Relays enDocument8 pagesARTECHE FY Auxiliary-Relays enferomagnetizamNo ratings yet
- IEEE Device Numbers and Functions For Switchgear ApparatusDocument12 pagesIEEE Device Numbers and Functions For Switchgear ApparatusSarah FrazierNo ratings yet
- 19Document3 pages19HshsjNo ratings yet
- Walls and PartitionsDocument13 pagesWalls and PartitionsSandip BudhathokiNo ratings yet
- ESA5011Document1 pageESA5011kamal_khan85No ratings yet
- Ricoh AD130 PC (Partes)Document19 pagesRicoh AD130 PC (Partes)desechableNo ratings yet